Legged robots are a type of mobile robot which use mechanical limbs for movement. They are more versatile than wheeled robots and can traverse many different terrains, though these advantages require increased complexity and power consumption. Legged robots often imitate legged animals, such as humans or insects, in an example of biomimicry.
Types
Legged robots can be categorized by the number of limbs they use, which determines gaits available. Many-legged robots tend to be more stable, while fewer legs lends itself to greater maneuverability.
One-legged
One-legged, or pogo stick robots use a hopping motion for navigation. In the 1980s, Carnegie Mellon University developed a one-legged robot to study balance. Berkeley’s SALTO is another example.
Two-legged
Bipedal or two-legged robots exhibit bipedal motion. As such, they face two primary problems:
stability control, which refers to a robot’s balance, and
motion control, which refers to a robot’s ability to move.
Stability control is particularly difficult for bipedal systems, which must maintain balance in the forward-backward direction even at rest. Some robots, especially toys, solve this problem with large feet, which provide greater stability while reducing mobility. Alternatively, more advanced systems use sensors such as accelerometers or gyroscopes to provide dynamic feedback in a fashion that approximates a human being’s balance. Such sensors are also employed for motion control and walking. The complexity of these tasks lends itself to machine learning.
Simple bipedal motion can be approximated by a rolling polygon where the length of each side matches that of a single step. As the step length grows shorter, the number of sides increases and the motion approaches that of a circle. This connects bipedal motion to wheeled motion as a limit of stride length.
Two-legged robots include:
Boston Dynamics’ Atlas
Toy robots such as QRIO and ASIMO.
NASA’s Valkyrie robot, intended to aid humans on Mars.
The ping-pong playing TOPIO robot.
Four-legged
Quadrupedal or four-legged robots exhibit quadrupedal motion. They benefit from increased stability over bipedal robots, especially during movement. At slow speeds, a quadrupedal robot may move only one leg at a time, ensuring a stable tripod. Four-legged robots also benefit from a lower center of gravity than two-legged systems.
Four legged robots include:
The TITAN series, developed since the 1980s by the Hirose-Yoneda Laboratory.
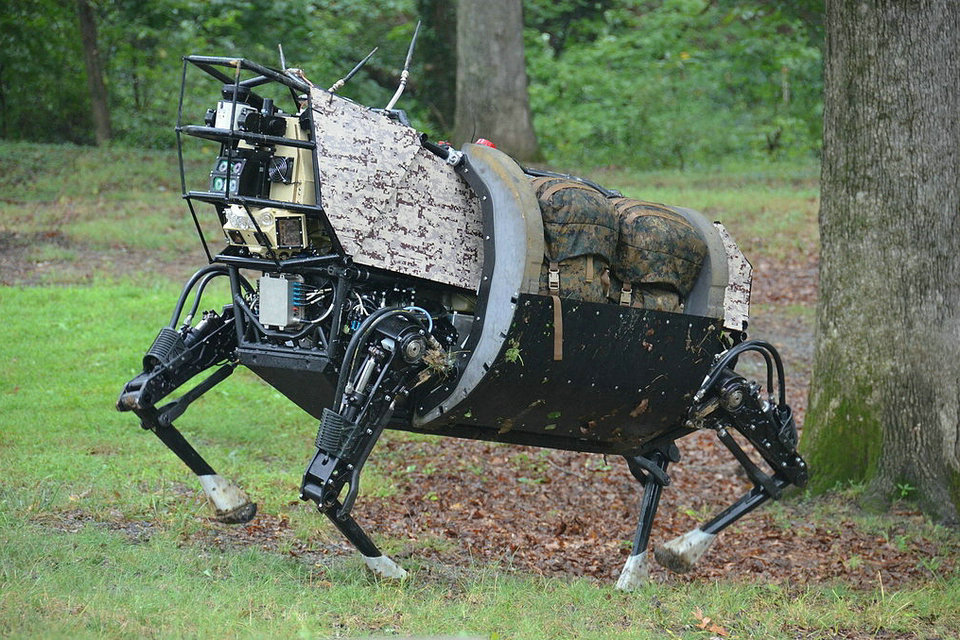
The dynamically stable BigDog, developed in 2005 by Boston Dynamics, NASA’s Jet Propulsion Laboratory, and the Harvard University Concord Field Station.
BigDog’s successor, the LS3.
Six-legged
Six-legged robots, or hexapods, are motivated by a desire for even greater stability than bipedal or quadrupedal robots. Their final designs often mimic the mechanics of insects, and their gaits may be categorized similarly. These include:
Wave gait: the slowest gait, in which pairs of legs move in a “wave” from the back to the front.
Tripod gait: a slightly faster step, in which three legs move at once. The remaining three legs provide a stable tripod for the robot.
Six-legged robots include:
Odex, a 375-pound hexapod developed by Odetics in the 1980s. Odex distinguished itself with its onboard computers, which controlled each leg.
Genghis, one of the earliest autonomous six-legged robots, was developed at MIT by Rodney Brooks in the 1980s.
The modern toy series, Hexbug.
Eight-legged
Eight-legged legged robots are inspired by spiders and other arachnids, as well as some underwater walkers. They offer by far the greatest stability, which enabled some early successes with legged robots.
Eight-legged robots include:
Dante, a Carnegie Mellon University project designed to explore Mount Erebus.
The T8X, a commercially available robot designed to emulate a spider’s appearance and movements.
Hybrids
Some robots use a combination of legs and wheels. This grants a machine the speed and energy efficiency of wheeled locomotion as well as the mobility of legged navigation. Boston Dynamics’ Handle, a bipedal robot with wheels on both legs, is one example.
Walking behavior
Static walking
Static walking is when the center of gravity of a robot is above the feet at all times, so that it can not fall over without the action of an external force.
Dynamic walking and running
Dynamic walking is when the center of gravity of a robot can also be outside the area of the feet without the robot falling down. In fact, one could speak of a “controlled fall” as the robot would fall in a sudden stop of its movement.
Dynamic walking is when the movement necessary to maintain speed results in a moment when no leg of the robot is touching the ground.
Static mobile robots
The classic walking robot consists of actuators , sensors and a computer control . The “legs” are usually moved by servomotors so that a predetermined movement program is unwound.
Two-legged static walking robot
The robot ASIMO moves with a maximum speed of 6 km / h, with a size of 1.30 m and a weight of 52 kg and he requires a lot of electrical energy. A special ability of him is that he can climb stairs.
Six-legged walking robot
Six-legged constructions are an ideal basis for statically stable walking robots. They are therefore suitable for movement on uneven terrain. There are two gaits (sequence of leg movements):
Tripod-course
Tetrapod transition
The tripod gear has three legs on the ground at any one time (example: Indian stick insect , with 3 stance and 3 swinging legs).
The tetrapod gait always has four legs on the ground (4 legs, 2 swinging legs).
In the case of gaiters with six orthogonal legs, a differentiation is also made according to the principle of movement of the legs apart from the sequence of leg movements:
Followers (follow the leader) (eg tripod gear, tetrapod gear)
Circular walker
Web runner (weaving walker)
Six-legged creatures run as followers. One leg follows (in whatever order) the other. Machines can do more. In the circular runner, the three legs of the right side have a common axis of rotation – like the hands of a clock (corresponding to the left legs). The rearmost leg is swung in front of the foremost leg. But how is the last leg to pass the other two legs? It simply swings under the belly (the robot platform).
The web runner also performs a biologically impossible movement. In the Web runner, all six legs sit on a common vertical axis in the center of the platform. Each leg can wander completely around the whole body (a horizontal telescopic movement makes it possible). The legs move from their rearmost position to the frontmost position by running around the other two legs on the outside.
When walking on uneven terrain, it is crucial that the robot find a safe touchdown point within its step size (foothold selection area) without having to deviate too far from its main heading direction.
Dynamic walking robot
Passive dynamic runners
Running robots that can move without energy source are based on a toy invented 150 years ago. It just had to be triggered and then could run down a small slope alone. To do this, the toy rocks from right to left and swings the leg straight up a little bit forward. Then it rocks from left to right and the other leg swings forward.
With this construction, the toy can move energy-efficiently and serve as a starting model for technically advanced running robots. In the 1980s, Tad McGeer had used the principle of the pendulum for stabilizing the movements , which was realized in this toy . No longer a complex and slow control system in a computer entrained should bring the robot to work, but the structure of the musculoskeletal system should stabilize the running robot without additional action. If the construction of the simple toy is supplemented with a “hip” or “movable feet”, then such walking robots only need energy when accelerating the moving masses and no longer as in earlier running robots also when braking.
Source from Wikipedia