Los robots con patas son un tipo de robot móvil que usa extremidades mecánicas para el movimiento. Son más versátiles que los robots con ruedas y pueden atravesar muchos terrenos diferentes, aunque estas ventajas requieren mayor complejidad y consumo de energía. Los robots con patas a menudo imitan a los animales con patas, como los humanos o los insectos, en un ejemplo de biomimetismo.
Los tipos
Los robots con patas se pueden clasificar por la cantidad de extremidades que utilizan, lo que determina los movimientos disponibles. Los robots de muchas patas tienden a ser más estables, mientras que menos patas se prestan para una mayor maniobrabilidad.
Con una pierna
Los robots de una sola pierna o pogo stick utilizan un movimiento de salto para la navegación. En la década de 1980, la Universidad Carnegie Mellon desarrolló un robot de una sola pierna para estudiar el equilibrio. El SALTO de Berkeley es otro ejemplo.
De dos patas
Los robots bipedales o de dos patas exhiben un movimiento bípedo. Como tales, se enfrentan a dos problemas principales:
control de estabilidad, que se refiere al equilibrio de un robot, y
Control de movimiento, que se refiere a la capacidad de un robot para moverse.
El control de estabilidad es particularmente difícil para los sistemas bípedos, que deben mantener el equilibrio hacia adelante y hacia atrás incluso en reposo. Algunos robots, especialmente los juguetes, resuelven este problema con pies grandes, que proporcionan una mayor estabilidad y reducen la movilidad. Alternativamente, los sistemas más avanzados usan sensores como acelerómetros o giroscopios para proporcionar retroalimentación dinámica de una manera que se aproxime al equilibrio de un ser humano. Tales sensores también se emplean para el control de movimiento y caminar. La complejidad de estas tareas se presta al aprendizaje automático.
El movimiento bípedo simple se puede aproximar mediante un polígono rodante donde la longitud de cada lado coincide con la de un solo paso. A medida que la longitud del paso se acorta, el número de lados aumenta y el movimiento se aproxima al de un círculo. Esto conecta el movimiento bípedo al movimiento con ruedas como límite de la longitud de zancada.
Los robots de dos patas incluyen:
Atlas de Boston Dynamics
Robots de juguete como QRIO y ASIMO.
El robot Valkyrie de la NASA, destinado a ayudar a los humanos en Marte.
El ping-pong jugando al robot TOPIO.
De cuatro patas
Los robots cuadrúpedos o de cuatro patas exhiben movimiento cuadrúpedo. Se benefician de una mayor estabilidad sobre los robots bípedos, especialmente durante el movimiento. A velocidades lentas, un robot cuadrúpedo puede mover solo una pierna a la vez, asegurando un trípode estable. Los robots de cuatro patas también se benefician de un centro de gravedad más bajo que los sistemas de dos patas.
Los robots de cuatro patas incluyen:
La serie TITAN, desarrollada desde la década de 1980 por el Laboratorio Hirose-Yoneda.
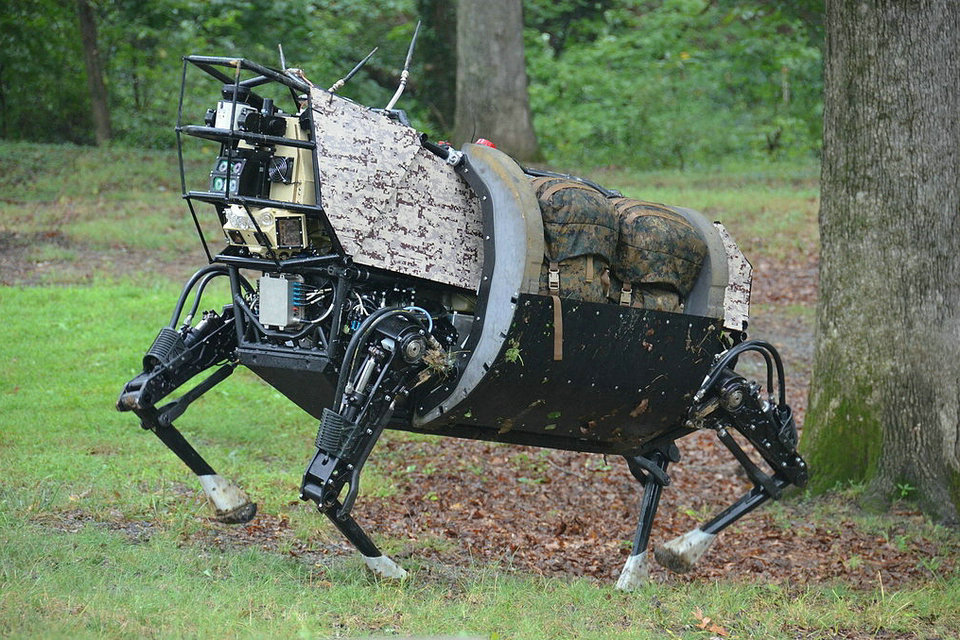
El BigDog dinámicamente estable, desarrollado en 2005 por Boston Dynamics, el Laboratorio de Propulsión a Chorro de la NASA y la Estación de Campo Concord de la Universidad de Harvard.
El sucesor de BigDog, el LS3.
Seis patas
Los robots de seis patas, o hexápodos, están motivados por el deseo de una estabilidad aún mayor que los robots bipedales o cuadrúpedos. Sus diseños finales a menudo imitan la mecánica de los insectos, y sus modos de andar se pueden clasificar de manera similar. Éstos incluyen:
Marcha de la ola: la marcha más lenta, en la que pares de piernas se mueven en una «ola» desde la parte posterior hacia el frente.
Trípode: un paso ligeramente más rápido, en el que tres piernas se mueven a la vez. Las tres patas restantes proporcionan un trípode estable para el robot.
Los robots de seis patas incluyen:
Odex, un hexápodo de 375 libras desarrollado por Odetics en la década de 1980. Odex se distinguió con sus computadoras a bordo, que controlaban cada pierna.
Genghis, uno de los primeros robots autónomos de seis patas, fue desarrollado en el MIT por Rodney Brooks en la década de 1980.
La serie de juguetes modernos, Hexbug.
Ocho patas
Los robots de patas de ocho patas están inspirados en arañas y otros arácnidos, así como en algunos caminantes submarinos. Ofrecen, con mucho, la mayor estabilidad, que permitió algunos éxitos iniciales con robots con patas.
Los robots de ocho patas incluyen:
Dante, un proyecto de la Universidad Carnegie Mellon diseñado para explorar el Monte Erebus.
El T8X, un robot disponible comercialmente diseñado para emular la apariencia y los movimientos de una araña.
Híbridos
Algunos robots usan una combinación de patas y ruedas. Esto otorga a una máquina la velocidad y la eficiencia energética de la locomoción con ruedas, así como la movilidad de la navegación con patas. El asa de Boston Dynamics, un robot bípedo con ruedas en ambas piernas, es un ejemplo.
Comportamiento a pie
Caminar estático
La marcha estática es cuando el centro de gravedad de un robot está sobre los pies en todo momento, de modo que no puede caerse sin la acción de una fuerza externa.
Caminar y correr dinámicamente.
La marcha dinámica es cuando el centro de gravedad de un robot también puede estar fuera del área de los pies sin que el robot se caiga. De hecho, se podría hablar de una «caída controlada» ya que el robot caería en una repentina detención de su movimiento.
La marcha dinámica es cuando el movimiento necesario para mantener la velocidad da como resultado un momento en el que ninguna pata del robot toca el suelo.
Robots móviles estáticos
El robot clásico para caminar consiste en actuadores, sensores y un control de computadora. Las «piernas» generalmente se mueven mediante servomotores, de manera que se desenrolla un programa de movimiento predeterminado.
Robot estático de dos patas para caminar
El robot ASIMO se mueve con una velocidad máxima de 6 km / h, con un tamaño de 1,30 my un peso de 52 kg y requiere mucha energía eléctrica. Una habilidad especial de él es que puede subir escaleras.
Robot de seis patas
Las construcciones de seis patas son una base ideal para robots andadores estáticamente estables. Por lo tanto, son adecuados para el movimiento en terrenos irregulares. Hay dos pasos (secuencia de movimientos de las piernas):
Curso de trípode
Transición tetrapod
El trípode tiene tres patas en el suelo a la vez (ejemplo: insecto palo indio, con 3 posturas y 3 patas giratorias).
El andar tetrápodo siempre tiene cuatro patas en el suelo (4 patas, 2 patas oscilantes).
En el caso de las polainas con seis patas ortogonales, también se hace una diferenciación de acuerdo con el principio de movimiento de las piernas aparte de la secuencia de movimientos de las piernas:
Seguidores (seguir al líder) (p. Ej., Trípode, tetrapod)
Andador circular
Corredor web (tejedora)
Criaturas de seis patas corren como seguidores. Una pierna sigue (en cualquier orden) la otra. Las máquinas pueden hacer más. En el corredor circular, las tres patas del lado derecho tienen un eje de rotación común, como las manecillas de un reloj (que corresponde a las patas izquierdas). La pierna más trasera se balancea por delante de la pierna más avanzada. Pero, ¿cómo es la última pierna para pasar las otras dos piernas? Simplemente se balancea debajo de la barriga (la plataforma del robot).
El corredor web también realiza un movimiento biológicamente imposible. En el corredor web, las seis patas se sientan en un eje vertical común en el centro de la plataforma. Cada pierna puede vagar completamente alrededor de todo el cuerpo (un movimiento telescópico horizontal lo hace posible). Las piernas se mueven desde su posición más trasera a la posición delantera al correr alrededor de las otras dos piernas en el exterior.
Al caminar en un terreno irregular, es crucial que el robot encuentre un punto de toma de contacto seguro dentro del tamaño de su escalón (área de selección del punto de apoyo) sin tener que desviarse demasiado de su dirección principal de rumbo.
Robot dinamico
Corredores pasivos dinámicos
Los robots en funcionamiento que pueden moverse sin una fuente de energía se basan en un juguete inventado hace 150 años. Solo tenía que activarse y luego podría correr solo una pequeña pendiente. Para hacer esto, el juguete se balancea de derecha a izquierda y balancea la pierna hacia arriba un poco hacia adelante. Luego oscila de izquierda a derecha y la otra pierna se mueve hacia adelante.
Con esta construcción, el juguete puede moverse con eficiencia energética y servir como un modelo de inicio para robots con tecnología avanzada. En la década de 1980, Tad McGeer había usado el principio del péndulo para estabilizar los movimientos, que se realizó en este juguete. Ya no un sistema de control complejo y lento en una computadora debe llevar el robot al trabajo, pero la estructura del sistema musculoesquelético debe estabilizar el robot en marcha sin acción adicional. Si la construcción del juguete simple se complementa con una «cadera» o «pies móviles», entonces tales robots ambulantes solo necesitan energía cuando aceleran las masas en movimiento y ya no como en robots anteriores, también cuando frenan.