Les robots à jambes sont un type de robot mobile qui utilise des membres mécaniques pour se déplacer. Ils sont plus polyvalents que les robots à roues et peuvent traverser de nombreux terrains différents, bien que ces avantages nécessitent une complexité et une consommation d’énergie accrues. Les robots à jambes imitent souvent les animaux à jambes, tels que les humains ou les insectes, dans un exemple de biomimétisme.
Les types
Les robots à pattes peuvent être classés en fonction du nombre de membres qu’ils utilisent, ce qui détermine les allures disponibles. Les robots à plusieurs jambes ont tendance à être plus stables, alors que moins de jambes se prêtent à une plus grande maniabilité.
Unijambiste
Les robots unijambistes ou en pogo stick utilisent un mouvement de sautillement pour la navigation. Dans les années 1980, l’Université Carnegie Mellon a mis au point un robot à une jambe pour étudier l’équilibre. Le SALTO de Berkeley est un autre exemple.
À deux pattes
Les robots bipèdes ou à deux jambes présentent un mouvement bipède. En tant que tels, ils sont confrontés à deux problèmes principaux:
le contrôle de stabilité, qui fait référence à la balance d’un robot, et
contrôle du mouvement, qui fait référence à la capacité d’un robot à se déplacer.
Le contrôle de la stabilité est particulièrement difficile pour les systèmes bipèdes, qui doivent maintenir leur équilibre dans les deux sens, même au repos. Certains robots, en particulier les jouets, résolvent ce problème avec de grands pieds qui offrent une plus grande stabilité tout en réduisant la mobilité. Alternativement, des systèmes plus avancés utilisent des capteurs tels que des accéléromètres ou des gyroscopes pour fournir un retour dynamique d’une manière qui se rapproche de l’équilibre d’un être humain. De tels capteurs sont également utilisés pour la commande de mouvement et la marche. La complexité de ces tâches se prête à l’apprentissage automatique.
Le mouvement bipède simple peut être approximé par un polygone roulant où la longueur de chaque côté correspond à celle d’un pas simple. Lorsque le pas diminue, le nombre de côtés augmente et le mouvement se rapproche de celui d’un cercle. Ceci relie le mouvement bipède au mouvement à roues en tant que limite de longueur de foulée.
Les robots à deux jambes incluent:
Atlas de Boston Dynamics
Robots jouets tels que QRIO et ASIMO.
Le robot Valkyrie de la NASA, destiné à aider les humains sur Mars.
Le ping-pong jouant au robot TOPIO.
À quatre pattes
Les robots à quadrupède ou à quatre pattes présentent un mouvement de quadrupède. Ils bénéficient d’une stabilité accrue par rapport aux robots bipèdes, en particulier lors des mouvements. À basse vitesse, un robot quadrupède ne peut se déplacer que d’une jambe à la fois, garantissant ainsi la stabilité du trépied. Les robots à quatre pieds bénéficient également d’un centre de gravité plus bas que les systèmes à deux pieds.
Les robots à quatre pattes comprennent:
La série TITAN, développée depuis les années 1980 par le laboratoire Hirose-Yoneda.
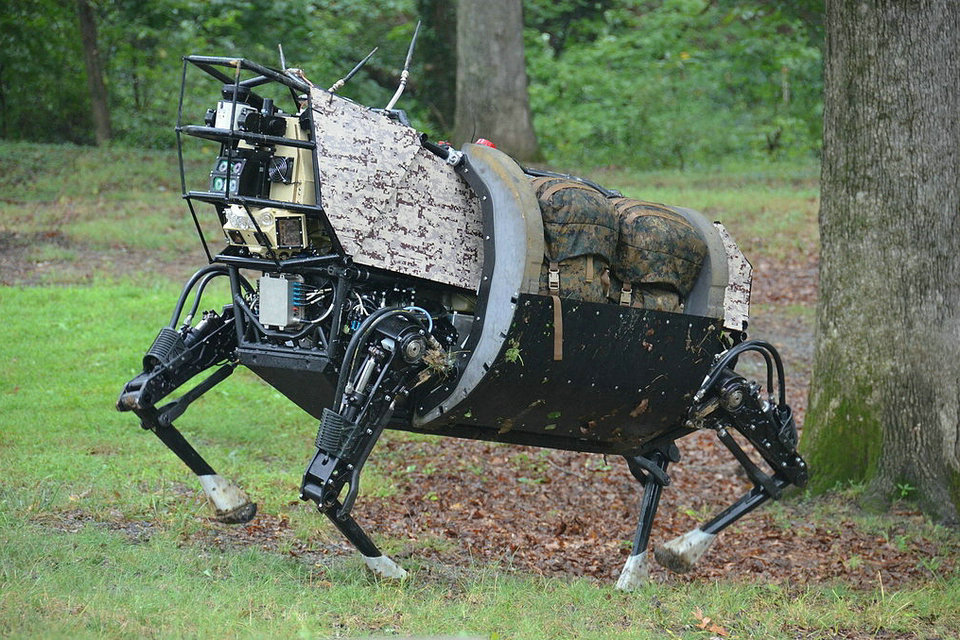
Le BigDog, dynamique et stable, développé en 2005 par Boston Dynamics, le Jet Propulsion Laboratory de la NASA et la station de recherche de l’Université Harvard de Concord.
Le successeur de BigDog, le LS3.
À six pattes
Les robots à six pattes, ou hexapodes, sont motivés par le désir d’une stabilité encore plus grande que les robots bipèdes ou quadruples. Leurs conceptions finales imitent souvent la mécanique des insectes et leurs allures peuvent être classées de la même manière. Ceux-ci inclus:
Marche de la vague: démarche la plus lente, dans laquelle les paires de jambes se déplacent en une « vague » de l’arrière vers l’avant.
Marche sur trépied: étape légèrement plus rapide dans laquelle trois jambes bougent en même temps. Les trois jambes restantes fournissent un trépied stable au robot.
Les robots à six pattes comprennent:
Odex, un hexapode de 375 livres développé par Odetics dans les années 1980. Odex s’est distingué avec ses ordinateurs de bord, qui contrôlaient chaque jambe.
Genghis, l’un des tout premiers robots autonomes à six pieds, a été développé au MIT par Rodney Brooks dans les années 1980.
La série de jouets modernes, Hexbug.
À huit pattes
Les robots à jambes à huit jambes sont inspirés par les araignées et autres arachnides, ainsi que par certains marcheurs sous-marins. Ils offrent de loin la plus grande stabilité, ce qui a permis certains premiers succès avec des robots à pattes.
Les robots à huit pattes comprennent:
Dante, un projet de l’Université Carnegie Mellon visant à explorer le mont Erebus.
Le T8X, un robot disponible dans le commerce conçu pour imiter l’apparence et les mouvements d’une araignée.
Hybrides
Certains robots utilisent une combinaison de jambes et de roues. Cela confère à une machine la vitesse et l’efficacité énergétique de la locomotion sur roues ainsi que la mobilité de la navigation avec jambes. Boston Dynamics ‘Handle, un robot bipède à roues sur deux jambes, en est un exemple.
Comportement de marche
Marche statique
La marche statique se produit lorsque le centre de gravité d’un robot se trouve au-dessus de ses pieds à tout moment, de sorte qu’il ne peut pas basculer sans l’action d’une force externe.
Marche et course dynamiques
La marche dynamique se produit lorsque le centre de gravité d’un robot peut également se trouver en dehors de la zone des pieds sans que le robot ne tombe. En fait, on pourrait parler de « chute contrôlée » car le robot tomberait dans un arrêt brusque de son mouvement.
La marche dynamique se produit lorsque le mouvement nécessaire au maintien de la vitesse entraîne un moment où aucune jambe du robot ne touche le sol.
Robots mobiles statiques
Le robot de marche classique comprend des actionneurs, des capteurs et une commande par ordinateur. Les « jambes » sont généralement déplacées par des servomoteurs de sorte qu’un programme de mouvement prédéterminé soit déroulé.
Robot de marche statique à deux jambes
Le robot ASIMO se déplace à une vitesse maximale de 6 km / h, d’une taille de 1,30 m et d’un poids de 52 kg. Il nécessite beaucoup d’énergie électrique. Une capacité spéciale de lui est qu’il peut monter des escaliers.
Robot de marche à six pattes
Les constructions à six pieds constituent une base idéale pour les robots de marche statiquement stables. Ils conviennent donc aux déplacements sur des terrains accidentés. Il y a deux allures (séquence de mouvements de jambe):
Cours trépied
Transition tétrapode
Le trépied a trois pieds sur le sol à la fois (exemple: insecte indien à 3 positions et 3 jambes mobiles).
La démarche du tétrapode a toujours quatre jambes au sol (4 jambes, 2 jambes oscillantes).
Dans le cas de guêtres à six jambes orthogonales, une différenciation est également effectuée selon le principe du mouvement des jambes en dehors de la séquence de mouvements des jambes:
Suiveurs (suivre le guide) (p. Ex. Équipement de trépied, équipement de tétrapode)
Marcheur circulaire
Web runner (marcheur de tissage)
Les créatures à six pattes courent comme des disciples. Une jambe suit (dans n’importe quel ordre) l’autre. Les machines peuvent faire plus. Dans le coureur circulaire, les trois jambes du côté droit ont un axe de rotation commun – comme les aiguilles d’une horloge (correspondant aux jambes gauches). La jambe la plus en arrière est basculée devant la jambe la plus en avant. Mais comment va la dernière jambe pour passer les deux autres jambes? Il bascule simplement sous le ventre (la plate-forme du robot).
Le coureur effectue également un mouvement biologiquement impossible. Dans le Web Runner, les six jambes reposent sur un axe vertical commun au centre de la plate-forme. Chaque jambe peut se promener complètement autour du corps (un mouvement télescopique horizontal le permet). Les jambes bougent de la position la plus en arrière à la position la plus en avant en courant autour des deux autres jambes à l’extérieur.
Lorsque vous marchez sur un terrain accidenté, il est essentiel que le robot trouve un point de contact sécurisé dans les limites de son pas (zone de sélection du pied) sans devoir trop s’écarter de sa direction principale.
Robot de marche dynamique
Coureurs dynamiques passifs
Les robots en fonctionnement capables de se déplacer sans source d’énergie sont basés sur un jouet inventé il y a 150 ans. Il suffisait juste de le déclencher pour pouvoir ensuite descendre seul une petite pente. Pour ce faire, le jouet bascule de droite à gauche et fait légèrement basculer la jambe vers l’avant. Ensuite, il bascule de gauche à droite et l’autre jambe bascule vers l’avant.
Grâce à cette construction, le jouet peut être économe en énergie et servir de modèle de départ pour des robots de course techniquement avancés. Dans les années 1980, Tad McGeer avait utilisé le principe du pendule pour stabiliser les mouvements, ce qui était réalisé dans ce jouet. Ce n’est plus un système de contrôle complexe et lent dans un ordinateur entraîné qui devrait amener le robot à fonctionner, mais la structure du système musculo-squelettique devrait stabiliser le robot en cours d’exécution sans action supplémentaire. Si la construction du jouet simple est complétée par une « hanche » ou des « pieds mobiles », de tels robots marcheurs n’ont besoin d’énergie que pour accélérer les masses en mouvement et non plus comme dans les robots qui couraient auparavant, ni même lors du freinage.