Roboter mit Beinen sind eine Art mobiler Roboter, der zur Bewegung mechanische Gliedmaßen verwendet. Sie sind vielseitiger als Roboter mit Rädern und können viele verschiedene Terrains durchqueren, obwohl diese Vorteile eine erhöhte Komplexität und einen höheren Energieverbrauch erfordern. In einem Beispiel für die Biomimikry imitieren Roboter mit Beinen häufig Tiere mit Beinen wie Menschen oder Insekten.
Typen
Roboter mit Beinen können nach der Anzahl der verwendeten Gliedmaßen kategorisiert werden, wodurch die verfügbaren Gänge bestimmt werden. Roboter mit vielen Beinen sind tendenziell stabiler, während sich weniger Beine für eine bessere Manövrierfähigkeit eignen.
Einbeinig
Einbeinige oder Pogo-Stick-Roboter verwenden eine Sprungbewegung für die Navigation. In den 1980er Jahren entwickelte die Carnegie Mellon University einen einbeinigen Roboter, um das Gleichgewicht zu untersuchen. Berkeleys SALTO ist ein anderes Beispiel.
Mit zwei Beinen
Zweibeinige oder zweibeinige Roboter weisen eine zweibeinige Bewegung auf. Als solche stehen sie vor zwei Hauptproblemen:
Stabilitätskontrolle, die sich auf die Balance eines Roboters bezieht, und
Bewegungssteuerung, die sich auf die Bewegungsfähigkeit eines Roboters bezieht.
Die Stabilitätskontrolle ist besonders schwierig für Zweibeinersysteme, die selbst im Ruhezustand das Gleichgewicht in Vorwärts-Rückwärts-Richtung halten müssen. Einige Roboter, insbesondere Spielzeug, lösen dieses Problem mit großen Füßen, die für mehr Stabilität sorgen und die Mobilität einschränken. Alternativ verwenden fortschrittlichere Systeme Sensoren wie Beschleunigungssensoren oder Gyroskope, um eine dynamische Rückmeldung auf eine Art und Weise bereitzustellen, die sich dem Gleichgewicht des Menschen annähert. Solche Sensoren werden auch zur Bewegungssteuerung und zum Gehen eingesetzt. Die Komplexität dieser Aufgaben eignet sich für maschinelles Lernen.
Eine einfache bipedale Bewegung kann durch ein rollendes Polygon angenähert werden, bei dem die Länge jeder Seite der Länge einer einzelnen Stufe entspricht. Wenn die Schrittlänge kürzer wird, nimmt die Anzahl der Seiten zu und die Bewegung nähert sich der eines Kreises an. Dies verbindet die Bewegung des Bipedals mit der Bewegung mit Rädern als Begrenzung der Schrittlänge.
Zweibeinige Roboter umfassen:
Boston Dynamics ‚Atlas
Spielzeugroboter wie QRIO und ASIMO.
Der NASA-Roboter Valkyrie soll den Menschen auf dem Mars helfen.
Das Ping-Pong spielende TOPIO-Roboter.
Vierbeiner
Vierbeinige oder vierbeinige Roboter weisen eine vierbeinige Bewegung auf. Sie profitieren von einer erhöhten Stabilität gegenüber Zweibeiner-Robotern, insbesondere während der Bewegung. Bei langsamer Geschwindigkeit bewegt sich ein Quadrupedal-Roboter möglicherweise immer nur ein Bein, um ein stabiles Stativ zu gewährleisten. Vierbeinige Roboter profitieren zudem von einem niedrigeren Schwerpunkt als zweibeinige Systeme.
Vierbeinige Roboter umfassen:
Die TITAN-Serie, seit den 1980er Jahren vom Hirose-Yoneda-Labor entwickelt.
Der dynamisch stabile BigDog wurde 2005 von Boston Dynamics, dem Jet Propulsion Laboratory der NASA und der Concord Field Station der Harvard University entwickelt.
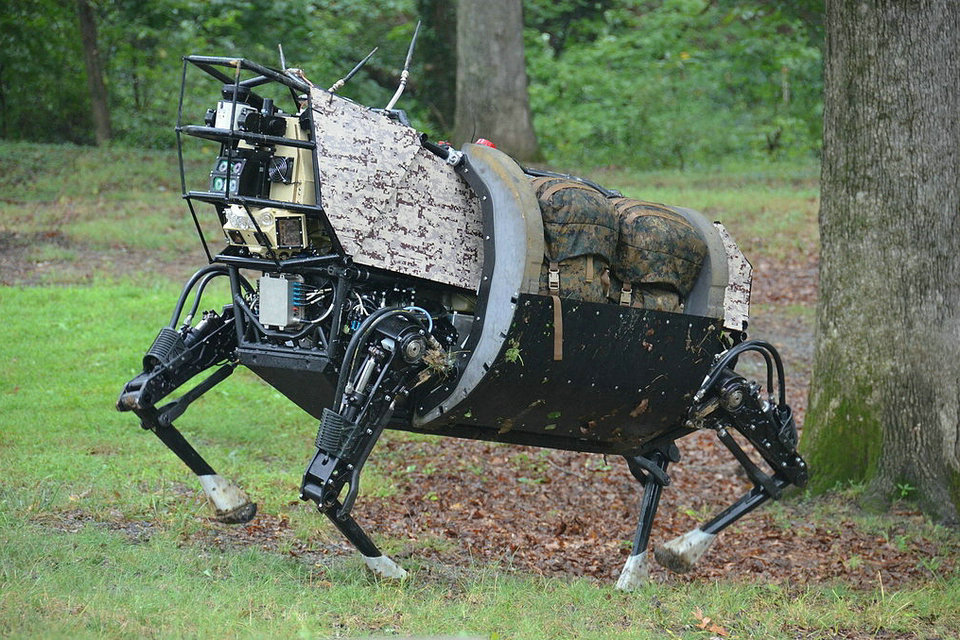
BigDog’s Nachfolger, der LS3.
Sechsbeinig
Sechsbeinige Roboter oder Hexapoden werden durch den Wunsch nach noch größerer Stabilität als bipedale oder vierbeinige Roboter motiviert. Ihre endgültigen Entwürfe imitieren oft die Mechanismen von Insekten, und ihre Gangarten können ähnlich kategorisiert werden. Diese schließen ein:
Wellengang: der langsamste Gang, bei dem sich die Beine in einer „Welle“ von hinten nach vorne bewegen.
Tripod-Gang: ein etwas schnellerer Schritt, bei dem sich drei Beine gleichzeitig bewegen. Die verbleibenden drei Beine stellen ein stabiles Stativ für den Roboter bereit.
Sechsbeinige Roboter umfassen:
Odex, ein 375-Pfund-Hexapod, der in den 1980ern von Odetics entwickelt wurde. Odex zeichnete sich durch seine Bordcomputer aus, die jedes Bein kontrollierten.
Genghis, einer der ersten autonomen sechsbeinigen Roboter, wurde in den 1980ern von Rodney Brooks am MIT entwickelt.
Die moderne Spielzeugserie Hexbug.
Achtbeinig
Achtbeinige Roboter werden von Spinnen und anderen Spinnentieren sowie einigen Unterwasserläufern inspiriert. Sie bieten bei weitem die größte Stabilität, was zu frühen Erfolgen mit Beinenrobotern führte.
Achtbeinige Roboter umfassen:
Dante, ein Projekt der Carnegie Mellon University, das den Mount Erebus erkunden soll.
Der T8X ist ein im Handel erhältlicher Roboter, der das Erscheinungsbild und die Bewegungen einer Spinne nachahmen soll.
Hybriden
Einige Roboter verwenden eine Kombination aus Beinen und Rädern. Dies verleiht einer Maschine die Geschwindigkeit und Energieeffizienz der Fortbewegung auf Rädern sowie die Mobilität der Navigation mit Beinen. Der Griff von Boston Dynamics, ein zweibeiniger Roboter mit Rädern an beiden Beinen, ist ein Beispiel.
Gehverhalten
Statisches Gehen
Statisches Gehen ist, wenn sich der Schwerpunkt eines Roboters zu jeder Zeit über den Füßen befindet, so dass er nicht ohne die Einwirkung einer äußeren Kraft umkippen kann.
Dynamisches Laufen und Gehen
Dynamisches Gehen ist, wenn der Schwerpunkt eines Roboters auch außerhalb des Fußbereichs liegen kann, ohne dass der Roboter herunterfällt. In der Tat könnte man von einem „kontrollierten Sturz“ sprechen, da der Roboter plötzlich abbricht.
Dynamisches Gehen bedeutet, dass die zur Aufrechterhaltung der Geschwindigkeit notwendige Bewegung zu einem Moment führt, in dem kein Bein des Roboters den Boden berührt.
Statische mobile Roboter
Der klassische Laufroboter besteht aus Aktoren, Sensoren und einer Computersteuerung. Die „Beine“ werden normalerweise durch Servomotoren bewegt, so dass ein vorbestimmtes Bewegungsprogramm abgewickelt wird.
Statischer Roboter mit zwei Beinen
Der Roboter ASIMO bewegt sich mit einer Höchstgeschwindigkeit von 6 km / h, einer Größe von 1,30 m und einem Gewicht von 52 kg und benötigt viel elektrische Energie. Eine besondere Fähigkeit von ihm ist, dass er Treppen steigen kann.
Sechsbeiniger Laufroboter
Sechsbeinige Konstruktionen sind eine ideale Basis für statisch stabile Laufroboter. Sie eignen sich daher für die Bewegung in unebenem Gelände. Es gibt zwei Gangarten (Reihenfolge der Beinbewegungen):
Stativ-Kurs
Tetrapodenübergang
Das Tripod-Gerät hat zu jeder Zeit drei Beine auf dem Boden (Beispiel: Indianer-Stock-Insekt mit 3 Haltung und 3 schwingenden Beinen).
Der Tetrapodengang hat immer vier Beine auf dem Boden (4 Beine, 2 schwingende Beine).
Bei Gamaschen mit sechs orthogonalen Beinen wird nach dem Bewegungsprinzip der Beine abgesehen von der Reihenfolge der Beinbewegungen unterschieden:
Anhänger (folgen Sie dem Führer) (z. B. Tripod-Ausrüstung, Tetrapod-Ausrüstung)
Rundwanderer
Webrunner (Webläufer)
Sechsbeinige Kreaturen laufen als Anhänger. Ein Bein folgt (in welcher Reihenfolge auch immer) dem anderen. Maschinen können mehr. Im Kreislauf haben die drei Beine der rechten Seite eine gemeinsame Rotationsachse – wie die Zeiger einer Uhr (entsprechend den linken Beinen). Das hinterste Bein wird vor dem vordersten Bein geschwenkt. Aber wie ist das letzte Bein, das die anderen beiden Beine passiert? Es schwingt einfach unter dem Bauch (der Roboterplattform).
Der Webrunner führt auch eine biologisch unmögliche Bewegung aus. Beim Web Runner sitzen alle sechs Beine auf einer gemeinsamen vertikalen Achse in der Mitte der Plattform. Jedes Bein kann vollständig um den ganzen Körper wandern (eine horizontale Teleskopbewegung macht es möglich). Die Beine bewegen sich von ihrer hintersten Position in die vorderste Position, indem sie um die anderen beiden Beine herum laufen.
Wenn Sie auf unebenem Gelände gehen, ist es wichtig, dass der Roboter innerhalb seiner Schrittgröße (Bereich für die Auswahl der Trittflächen) einen sicheren Aufsetzpunkt findet, ohne zu weit von der Hauptausrichtung des Kopfes abweichen zu müssen.
Dynamischer gehender Roboter
Passive dynamische Läufer
Laufroboter, die sich ohne Energiequelle bewegen können, basieren auf einem Spielzeug, das vor 150 Jahren erfunden wurde. Es musste nur ausgelöst werden und konnte dann alleine einen kleinen Abhang hinunterlaufen. Dazu schaukelt das Spielzeug von rechts nach links und schwingt das Bein ein Stück nach vorne. Dann schaukelt es von links nach rechts und das andere Bein schwingt nach vorne.
Mit dieser Konstruktion kann sich das Spielzeug energieeffizient bewegen und als Startmodell für technisch fortgeschrittene Laufroboter dienen. In den achtziger Jahren hatte Tad McGeer das Prinzip des Pendels zur Stabilisierung der Bewegungen verwendet, das in diesem Spielzeug verwirklicht wurde. Nicht mehr ein komplexes und langsames Steuersystem in einem mitgeführten Computer sollte den Roboter zur Arbeit bringen, sondern die Struktur des Bewegungsapparates sollte den laufenden Roboter ohne zusätzliche Maßnahmen stabilisieren. Wenn die Konstruktion des einfachen Spielzeugs um eine „Hüfte“ oder „bewegliche Füße“ ergänzt wird, benötigen solche Laufroboter nur noch Energie zum Beschleunigen der bewegten Massen und nicht mehr wie bei früheren Laufrobotern auch beim Bremsen.