लीग्ड रोबोट एक प्रकार का मोबाइल रोबोट है जो आंदोलन के लिए यांत्रिक अंगों का उपयोग करता है। वे व्हील वाले रोबोटों की तुलना में अधिक बहुमुखी हैं और कई अलग-अलग इलाकों में जा सकते हैं, हालांकि इन फायदों में जटिलता और बिजली की खपत में वृद्धि की आवश्यकता है। लेग्ड रोबोट अक्सर जैव-चिकित्सा के उदाहरण में मनुष्यों या कीड़ों जैसे पैर वाले जानवरों की नकल करते हैं।
प्रकार
लीग्ड रोबोटों को उनके द्वारा उपयोग किए जाने वाले अंगों की संख्या से वर्गीकृत किया जा सकता है, जो उपलब्ध गाइट निर्धारित करता है। कई पैर वाले रोबोट अधिक स्थिर होते हैं, जबकि कम पैर स्वयं को अधिक गतिशीलता के लिए उधार देते हैं।
एकपद
एक पैर वाली, या पोगो स्टिक रोबोट नेविगेशन के लिए एक hopping गति का उपयोग करें। 1 9 80 के दशक में, कार्नेगी मेलॉन विश्वविद्यालय ने संतुलन का अध्ययन करने के लिए एक पैर वाली रोबोट विकसित की। बर्कले का सैल्टो एक और उदाहरण है।
दो पैरों वाला
द्विपक्षीय या दो पैर वाले रोबोट द्विपक्षीय गति प्रदर्शित करते हैं। ऐसे में, उन्हें दो प्राथमिक समस्याओं का सामना करना पड़ता है:
स्थिरता नियंत्रण, जो रोबोट के संतुलन को संदर्भित करता है, और
गति नियंत्रण, जो रोबोट की जाने की क्षमता को संदर्भित करता है।
स्थिरता नियंत्रण द्विपक्षीय प्रणालियों के लिए विशेष रूप से कठिन होता है, जो आराम से आगे की दिशा में संतुलन को बनाए रखना चाहिए। कुछ रोबोट, विशेष रूप से खिलौने, बड़े पैमाने पर इस समस्या को हल करते हैं, जो गतिशीलता को कम करते हुए अधिक स्थिरता प्रदान करते हैं। वैकल्पिक रूप से, अधिक उन्नत सिस्टम एक ऐसे फैशन में गतिशील प्रतिक्रिया प्रदान करने के लिए एक्सेलेरोमीटर या जीरोस्कोप जैसे सेंसर का उपयोग करते हैं जो मानव के संतुलन को अनुमानित करता है। ऐसे सेंसर गति नियंत्रण और चलने के लिए भी नियोजित होते हैं। इन कार्यों की जटिलता खुद को मशीन सीखने के लिए उधार देती है।
सरल द्विपक्षीय गति को एक रोलिंग बहुभुज द्वारा अनुमानित किया जा सकता है जहां प्रत्येक पक्ष की लंबाई एक ही चरण से मेल खाती है। जैसे-जैसे चरण की लंबाई कम हो जाती है, पक्षों की संख्या बढ़ जाती है और गति एक चक्र के दृष्टिकोण तक पहुंच जाती है। यह द्विपक्षीय गति को व्हील गति को तार की लंबाई की सीमा के रूप में जोड़ता है।
दो पैर वाली रोबोट में शामिल हैं:
बोस्टन डायनेमिक्स ‘एटलस
क्यूआरओओ और एएसआईएमओ जैसे खिलौने रोबोट।
नासा के वाल्केरी रोबोट, मंगल ग्रह पर मनुष्यों की सहायता करने के इरादे से।
पिंग-पोंग टॉपियो रोबोट खेल रहा है।
चार पैर
चतुर्भुज या चार पैर वाले रोबोट चौगुनी गति प्रदर्शित करते हैं। वे विशेष रूप से आंदोलन के दौरान, द्विपक्षीय रोबोटों पर बढ़ी स्थिरता से लाभान्वित होते हैं। धीमी गति से, एक चौथाई रोबोट एक समय में केवल एक पैर ले जा सकता है, एक स्थिर तिपाई सुनिश्चित करता है। चार पैर वाले रोबोटों को गुरुत्वाकर्षण के निचले केंद्र से भी दो-पैर वाली प्रणालियों की तुलना में लाभ होता है।
चार पैर वाले रोबोटों में शामिल हैं:
टीआईटीएएन श्रृंखला, 1 9 80 के दशक से हीरोस-योनदा प्रयोगशाला द्वारा विकसित की गई।
गतिशील रूप से स्थिर बिगडॉग, 2005 में बोस्टन डाइनेमिक्स, नासा के जेट प्रोपल्सन प्रयोगशाला, और हार्वर्ड यूनिवर्सिटी कॉनकॉर्ड फील्ड स्टेशन द्वारा विकसित किया गया।
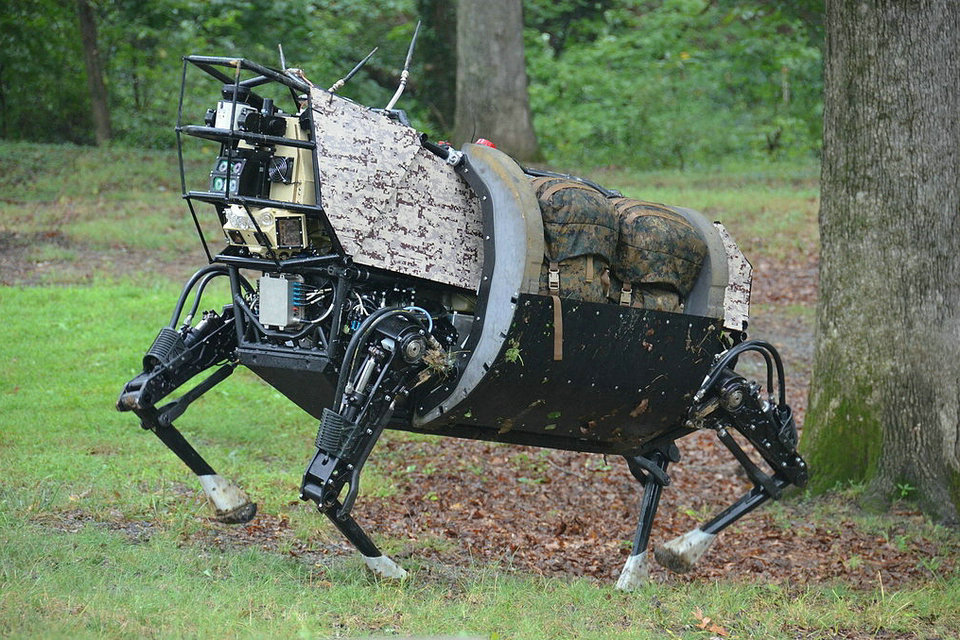
बिगडॉग के उत्तराधिकारी, एलएस 3।
छह पैरों वाला
छः पैर वाले रोबोट, या हेक्सापोड, द्विपक्षीय या चौगुनी रोबोट की तुलना में अधिक स्थिरता की इच्छा से प्रेरित होते हैं। उनके अंतिम डिजाइन अक्सर कीड़ों के यांत्रिकी की नकल करते हैं, और उनके गेट्स को समान रूप से वर्गीकृत किया जा सकता है। इसमें शामिल है:
वेव गेट: सबसे धीमी गति, जिसमें पैरों के जोड़े पीछे से आगे की तरफ “लहर” में जाते हैं।
त्रिपोद चाल: थोड़ा तेज कदम, जिसमें तीन पैर एक बार में चले जाते हैं। शेष तीन पैर रोबोट के लिए एक स्थिर तिपाई प्रदान करते हैं।
छः पैर वाली रोबोटों में शामिल हैं:
ओडेक्स, 1 9 80 के दशक में ओडेटिक्स द्वारा विकसित 375 पौंड हेक्सापॉड। ओडेक्स ने अपने ऑनबोर्ड कंप्यूटरों के साथ खुद को प्रतिष्ठित किया, जिसने प्रत्येक पैर को नियंत्रित किया।
1 9 80 के दशक में रॉडनी ब्रूक्स द्वारा एमआईटी में शुरुआती स्वायत्त छः पैर वाले रोबोटों में से एक, जेघिस विकसित किया गया था।
आधुनिक खिलौना श्रृंखला, हेक्सबग।
आठ पैरों वाला
आठ पैर वाले पैर वाले रोबोट मकड़ियों और अन्य आरेक्निकों के साथ-साथ कुछ पानी के नीचे वॉकर से प्रेरित हैं। वे अब तक की सबसे बड़ी स्थिरता प्रदान करते हैं, जिसने कुछ शुरुआती सफलताओं को पैर वाले रोबोटों के साथ सक्षम किया है।
आठ पैर वाली रोबोट में शामिल हैं:
दांते, मार्न ईरबस का पता लगाने के लिए डिज़ाइन किया गया कार्नेगी मेलॉन यूनिवर्सिटी प्रोजेक्ट।
टी 8 एक्स, एक व्यावसायिक रूप से उपलब्ध रोबोट जो मकड़ी की उपस्थिति और आंदोलनों का अनुकरण करने के लिए डिज़ाइन किया गया है।
संकर
कुछ रोबोट पैर और पहियों के संयोजन का उपयोग करते हैं। यह एक मशीन को व्हीलड लोकोमोशन की गति और ऊर्जा दक्षता के साथ-साथ पैर की गई नेविगेशन की गतिशीलता प्रदान करता है। बोस्टन डायनेमिक्स ‘हैंडल, दोनों पैरों पर पहियों के साथ एक द्विपक्षीय रोबोट, एक उदाहरण है।
चलने का व्यवहार
स्थिर चलना
स्थिर चलना तब होता है जब रोबोट की गुरुत्वाकर्षण का केंद्र हर समय पैर से ऊपर होता है, ताकि बाहरी बल की कार्रवाई के बिना यह गिर न सके।
गतिशील चलना और चलना
गतिशील चलना तब होता है जब रोबोट की गुरुत्वाकर्षण का केंद्र रोबोट गिरने के बिना पैरों के क्षेत्र के बाहर भी हो सकता है। वास्तव में, कोई “नियंत्रित गिरावट” के बारे में बात कर सकता है क्योंकि रोबोट अपने आंदोलन के अचानक बंद होने पर गिर जाएगा।
गतिशील चलना तब होता है जब गति को बनाए रखने के लिए आवश्यक आंदोलन एक पल में होता है जब रोबोट का कोई भी पैर जमीन को छूता नहीं है।
स्टेटिक मोबाइल रोबोट
क्लासिक पैदल चलने वाले रोबोट में एक्ट्यूएटर, सेंसर और कंप्यूटर नियंत्रण होता है। “पैरों” आमतौर पर servomotors द्वारा स्थानांतरित कर रहे हैं ताकि एक पूर्वनिर्धारित आंदोलन कार्यक्रम अवांछित है।
दो पैर वाली स्थिर चलने वाली रोबोट
रोबोट एएसआईएमओ 1.30 मीटर के आकार और 52 किलो वजन के साथ अधिकतम 6 किमी / घंटा की गति के साथ चलता है और उसे बहुत सारी विद्युत ऊर्जा की आवश्यकता होती है। उनकी एक विशेष क्षमता यह है कि वह सीढ़ियों पर चढ़ सकते हैं।
छह पैर वाली पैदल रोबोट
छह पैर वाले निर्माण स्थिर स्थिर चलने वाले रोबोटों के लिए आदर्श आधार हैं। इसलिए वे असमान इलाके पर आंदोलन के लिए उपयुक्त हैं। दो गेट्स (पैर आंदोलनों का अनुक्रम) हैं:
तिपाई पाठ्यक्रम
Tetrapod संक्रमण
तिपाई गियर जमीन पर तीन पैरों पर किसी भी समय होता है (उदाहरण: भारतीय स्टिक कीट, 3 रुख और 3 स्विंगिंग पैरों के साथ)।
टेट्रोपोड चाल हमेशा जमीन पर चार पैर (4 पैर, 2 झूलते पैर) होते हैं।
छह ऑर्थोगोनल पैरों वाले गेटर्स के मामले में, पैर की गति के अनुक्रम से अलग पैरों के आंदोलन के सिद्धांत के अनुसार एक भिन्नता भी बनाई जाती है:
अनुयायियों (नेता का पालन करें) (उदाहरण के लिए तिपाई गियर, टेट्रोपोड गियर)
परिपत्र वॉकर
वेब धावक (बुनाई वॉकर)
छह पैर वाले प्राणी अनुयायियों के रूप में चलते हैं। एक पैर दूसरे (किसी भी क्रम में) का पालन करता है। मशीनें और अधिक कर सकती हैं। परिपत्र धावक में, दाएं तरफ के तीन पैरों में घूर्णन की एक सामान्य धुरी होती है – जैसे घड़ी के हाथ (बाएं पैर के अनुरूप)। Rearmost पैर सबसे प्रमुख पैर के सामने swung है। लेकिन दूसरे पैर को पार करने के लिए अंतिम चरण कैसा है? यह बस पेट (रोबोट मंच) के नीचे स्विंग करता है।
वेब धावक भी जैविक रूप से असंभव आंदोलन करता है। वेब धावक में, सभी छह पैर मंच के केंद्र में एक सामान्य लंबवत धुरी पर बैठते हैं। प्रत्येक पैर पूरी तरह से पूरे शरीर के चारों ओर घूम सकता है (एक क्षैतिज दूरबीन आंदोलन इसे संभव बनाता है)। पैरों को बाहर की ओर दो अन्य पैरों के चारों ओर दौड़कर अपने सबसे ऊपर की स्थिति से आगे की स्थिति में ले जाते हैं।
असमान इलाके में चलते समय, यह महत्वपूर्ण है कि रोबोट को अपने मुख्य आकार की दिशा से बहुत दूर विचलित किए बिना अपने चरण आकार (पैरहोल चयन क्षेत्र) के भीतर एक सुरक्षित टचडाउन बिंदु मिल जाए।
गतिशील चलने रोबोट
निष्क्रिय गतिशील धावक
रोबोट चलाना जो ऊर्जा स्रोत के बिना आगे बढ़ सकता है 150 साल पहले आविष्कार किए गए खिलौने पर आधारित है। इसे सिर्फ ट्रिगर किया जाना था और फिर अकेले एक छोटी ढलान चला सकता था। ऐसा करने के लिए, खिलौने दाएं से बाएं चट्टानों और पैर थोड़ा आगे आगे स्विंग करता है। फिर यह बाएं से दाएं चट्टानों और दूसरे पैर आगे स्विंग।
इस निर्माण के साथ, खिलौना ऊर्जा कुशलता से स्थानांतरित कर सकता है और तकनीकी रूप से उन्नत चल रहे रोबोट के लिए एक प्रारंभिक मॉडल के रूप में कार्य कर सकता है। 1 9 80 के दशक में, टैड मैकजीर ने आंदोलन को स्थिर करने के लिए पेंडुलम के सिद्धांत का उपयोग किया था, जिसे इस खिलौने में महसूस किया गया था। अब कंप्यूटर में एक जटिल और धीमी नियंत्रण प्रणाली को रोबोट को काम पर लाया जाना चाहिए, लेकिन musculoskeletal प्रणाली की संरचना को अतिरिक्त कार्रवाई के बिना चल रहे रोबोट को स्थिर करना चाहिए। यदि साधारण खिलौने के निर्माण को “हिप” या “जंगम पैर” के साथ पूरक किया जाता है, तो ऐसे चलने वाले रोबोटों को केवल चलने वाले लोगों को तेज करते समय ऊर्जा की आवश्यकता होती है और जब ब्रेक लगाना भी पहले चल रहे रोबोट में नहीं होता है।