다리가있는 로봇은 이동을 위해 기계적 팔다리를 사용하는 일종의 이동 로봇입니다. 이 로봇은 바퀴 달린 로봇보다 다재다능하며 많은 지형을 통과 할 수 있습니다. 그러나 이러한 장점은 복잡성과 전력 소비가 증가해야합니다. 다리가있는 로봇은 종종 생체 모방의 예에서 인간 또는 곤충과 같은 다리가있는 동물을 모방합니다.
유형
다리가있는 로봇은 사용하는 걸음 수를 결정하는 팔다리 수에 따라 분류 할 수 있습니다. 많은 다리가 달린 로봇은보다 안정적인 경향이 있고, 적은 다리는 더 큰 기동성을 제공합니다.
한발 다리
한쪽 다리 또는 포고 스틱 로봇은 탐색을 위해 호핑 동작을 사용합니다. 1980 년대 카네기 멜론 대학 (Carnegie Mellon University)은 균형을 연구 할 수있는 한발 다리 로봇을 개발했습니다. 버클리의 SALTO가 또 다른 예입니다.
양 다리
Bipedal 또는 Two-legged 로봇은 양팔 운동을 나타냅니다. 따라서 두 가지 주요 문제에 직면합니다.
로봇의 균형을 의미하는 안정성 제어 및
모션 제어 : 로봇의 이동 능력을 나타냅니다.
안정 제어는 양팔 시스템에서 특히 어려워 휴식 중에도 전후 방향으로 균형을 유지해야합니다. 일부 로봇, 특히 장난감은 큰 피트로이 문제를 해결하여 이동성을 줄이면서 안정성을 향상시킵니다. 또한,보다 진보 된 시스템은 가속도계 또는 자이로 스코프와 같은 센서를 사용하여 인간의 균형에 가까운 방식으로 동적 피드백을 제공합니다. 이러한 센서는 모션 제어 및 보행에도 사용됩니다. 이러한 작업의 복잡성은 기계 학습에 도움이됩니다.
간단한 양팔 운동은 각면의 길이가 단일 단계의 길이와 일치하는 롤링 다각형으로 근사 할 수 있습니다. 스텝 길이가 짧아지면 변의 수는 증가하고 모션은 원의 움직임에 접근합니다. 이것은 두 발의 움직임을 바퀴 달린 움직임에 보폭의 한계로 연결합니다.
두 다리 로봇은 다음과 같습니다.
Boston Dynamics ‘Atlas
QRIO 및 ASIMO와 같은 장난감 로봇.
화성에 인간을 돕기위한 NASA의 발키리 (Valkyrie) 로봇.
탁구는 TOPIO 로봇입니다.
4 발
4 족 또는 4 족 로봇은 4 륜 동작을 나타냅니다. 그들은 특히 이동 중에 2 족 보행 로봇에 비해 안정성이 향상된다는 이점을 얻습니다. 느린 속도에서는 사분의 일 로봇이 한 번에 한 다리 만 움직여 안정적인 삼각대를 확보 할 수 있습니다. 4 족 보행 로봇은 2 족 보 시스템보다 낮은 무게 중심에서도 이익을 얻습니다.
네 다리 로봇은 다음과 같습니다 :
히로세 요네 다 연구소에서 1980 년대에 개발 한 TITAN 시리즈.
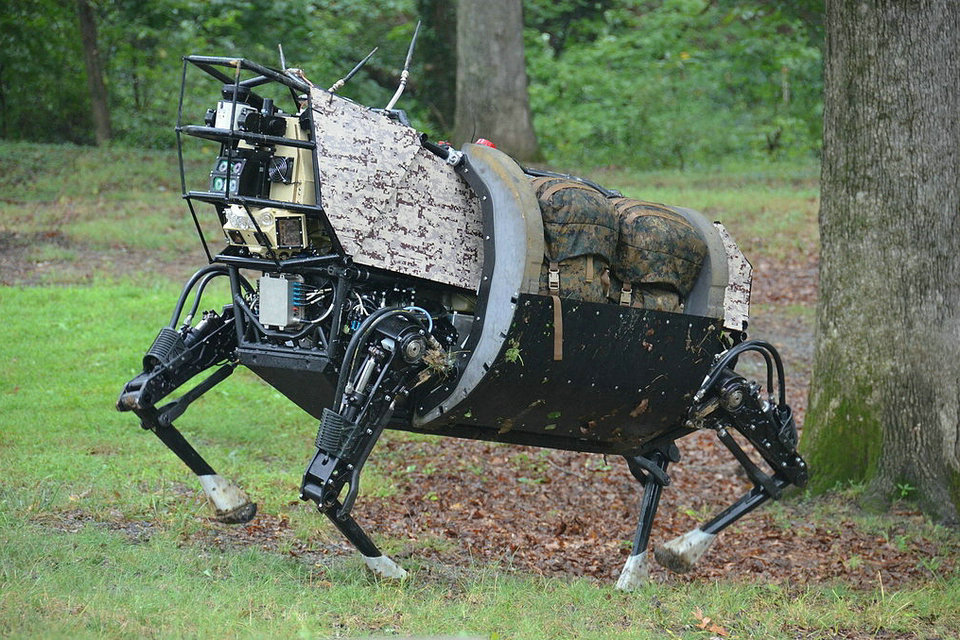
Boston Dynamics, NASA의 Jet Propulsion Laboratory 및 Harvard University Concord Field Station에 의해 2005 년에 개발 된 동적으로 안정된 BigDog.
BigDog의 후계자 인 LS3.
여섯 다리
6 각형 로봇 또는 육각형 로봇은 2 족 또는 4 족 로봇보다 더 큰 안정성을 원합니다. 그들의 최종 디자인은 종종 곤충의 메커니즘을 모방하며, 그들의 보행은 유사하게 분류 될 수 있습니다. 여기에는 다음이 포함됩니다.
웨이브 보행 : 다리 쌍이 뒤에서 앞으로 움직이는 “파”에서 가장 느린 걸음 걸이.
삼각대 보행 : 3 개의 다리가 한 번에 움직이는 약간 더 빠른 단계. 나머지 세 개의 다리는 로봇을위한 안정적인 삼각대를 제공합니다.
6 각형 로봇은 다음과 같습니다.
Odex는 1980 년대에 Odetics가 개발 한 375 파운드의 육각형입니다. Odex는 온보드 컴퓨터로 각 다리를 제어했습니다.
Genghis는 초기 Autonomous 6 족보 로봇 중 하나로서, 1980 년대 Rodney Brooks가 MIT에서 개발했습니다.
현대 장난감 시리즈, Hexbug.
팔 다리
팔 다리가있는 로봇은 거미 및 기타 거미류뿐만 아니라 일부 수중 워커로부터 영감을 얻습니다. 이 로봇은 다리가 달린 로봇으로 초기 성공을 거둘 수있는 최고의 안정성을 제공합니다.
8 족 로봇은 다음과 같습니다.
단테, Erebus 산을 탐험하기 위해 고안된 Carnegie Mellon University 프로젝트.
T8X는 거미의 모양과 움직임을 모방하도록 설계된 상용 로봇입니다.
잡종
일부 로봇은 다리와 바퀴의 조합을 사용합니다. 이것은 바퀴가 달린 운동의 속도와 에너지 효율뿐만 아니라 다리가있는 항법의 이동성을 기계에 부여합니다. 양 다리에 바퀴가 달린 2 족 보행 로봇 인 Boston Dynamics ‘Handle이 한 가지 예입니다.
걷기 행동
정적 보행
정적 보행은 로봇의 무게 중심이 항상 발 위에있을 때 외부 힘의 작용없이 넘어지지 않도록하는 것입니다.
동적 워킹 및 러닝
동적 보행은 로봇의 무게 중심이 로봇이 떨어지지 않고 발의 영역 밖에있을 수있는 경우입니다. 사실 로봇이 갑작스럽게 멈추는 동안 “추락하는 통제”에 대해 말할 수 있습니다.
동적 보행은 속도를 유지하는 데 필요한 동작이 로봇의 다리가지면에 닿지 않는 순간을 초래하는 경우입니다.
정적 모바일 로봇
클래식 보행 로봇은 액추에이터, 센서 및 컴퓨터 컨트롤로 구성됩니다. “다리”는 일반적으로 서보 모터에 의해 움직여 사전 결정된 운동 프로그램이 푸는 방향입니다.
두발 고정식 보행 로봇
로봇 ASIMO는 최대 속도 6km / h로 움직이며 크기는 1.30m이고 무게는 52kg이며 많은 전기 에너지가 필요합니다. 특별한 능력은 계단을 오를 수 있다는 것입니다.
6 족 보행 로봇
여섯 다리 구조는 정적으로 안정된 보행 로봇을위한 이상적인 토대입니다. 따라서 고르지 않은 지형에서의 이동에 적합합니다. 두 가지 보행 (다리 움직임 시퀀스)이 있습니다.
삼각대 코스
테트라포드 전이
삼각대 장비는 한 번에 땅에 세 개의 다리가 있습니다 (예 : 3 개의 자세와 3 개의 흔들리는 다리가있는 인디언 스틱 곤충).
사지 발은 4 발 (4 발, 2 발)으로 항상 걷습니다.
6 개의 직각 다리가있는 보행기의 경우, 다리 움직임 순서와는 별도로 다리 움직임의 원리에 따라 차별화됩니다.
추종자 (지도자를 따르십시오) (예 : 삼각대 기어, 사다리꼴 기어)
순환 보행기
웹 러너 (직조 보행기)
여섯 발의 생물이 추종자로 움직입니다. 한쪽 다리는 (다른 순서대로) 다른 한쪽 다리를 따라 간다. 기계는 더 많은 일을 할 수 있습니다. 원형 주자에서 오른쪽 측면의 세 다리는 시계의 손처럼 (왼쪽 다리에 해당) 일반적인 회전축을가집니다. 최전방 다리 앞에서 가장 뒤쪽 다리가 휘젓습니다. 그러나 마지막 다리가 다른 두 다리를 통과하는 방법은 무엇입니까? 그것은 배 (로봇 플랫폼) 아래에서 간단히 움직입니다.
웹 러너는 생물학적으로 불가능한 동작을 수행합니다. 웹 러너에서 6 개의 다리는 모두 플랫폼의 중앙에있는 공통 세로축에 놓입니다. 각 다리는 전신 주위를 완전히 돌아 다닐 수 있습니다 (수평 망원 운동으로 가능합니다). 다리는 바깥 쪽의 다른 두 다리를 따라 움직여 최하위 위치에서 최전방 위치로 이동합니다.
고르지 않은 지형을 걷는 경우 로봇은 주 방향으로 너무 멀리 벗어나지 않으면 서 단계 크기 (발판 선택 영역) 내에서 안전한 터치 다운 포인트를 찾는 것이 중요합니다.
동적 보행 로봇
패시브 다이내믹 러너
에너지 원없이 움직일 수있는 러닝 로봇은 150 년 전에 발명 된 장난감을 기반으로합니다. 그것은 방아쇠를 당겨야 만했고, 그 후에 작은 경사면을 따라 내려갈 수있었습니다. 이렇게하기 위해, 장난감은 오른쪽에서 왼쪽으로 흔들리고 다리를 똑바로 조금 똑바로 흔 듭니다. 그런 다음 왼쪽에서 오른쪽으로 흔들리고 다른 다리는 앞으로 흔들립니다.
이 구조로, 장난감은 에너지 효율적으로 움직일 수 있으며 기술적으로 진보 된 달리기 로봇의 시작 모델 역할을합니다. 1980 년대 태드 맥기 (Tad McGeer)는이 장난감에서 실현 된 움직임을 안정화시키기 위해 진자의 원리를 사용했습니다. 더 이상 복잡한 컴퓨터에서 느린 제어 시스템이 로봇을 작동시켜야하지만, 근골격계 시스템의 구조는 추가 조치없이 실행중인 로봇을 안정시켜야합니다. 간단한 장난감의 제작에 “엉덩이”또는 “이동식 발”이 추가 된 경우 이러한 걷는 로봇은 움직이는 질량을 가속 할 때 에너지를 필요로하며 더 이상 브레이크를 밟을 때 이전에 작동하는 로봇처럼 에너지가 필요하지 않습니다.