腿式机器人
腿式机器人是一种使用机械肢体进行移动的移动机器人。 它们比轮式机器人更通用,并且可以穿越许多不同的地形,尽管这些优点需要增加复杂性和功耗。 在仿生学的例子中,有腿的机器人经常模仿有腿的动物,例如人或昆虫。
类型
腿部机器人可以根据他们使用的肢体数量进行分类,这决定了可用的步态。 多腿机器人往往更稳定,而更少的腿有助于提高机动性。
独腿
单腿或弹簧摇杆机器人使用跳跃动作进行导航。 在20世纪80年代,卡内基梅隆大学开发了一种单腿机器人来研究平衡。 伯克利的SALTO是另一个例子。
两足
双足或双腿机器人表现出双足运动。 因此,他们面临两个主要问题:
稳定性控制,指机器人的平衡,和
运动控制,指机器人的移动能力。
对于双足系统来说,稳定性控制尤其困难,即使在休息时也必须保持前后方向的平衡。 一些机器人,特别是玩具,用大脚解决了这个问题,这提供了更大的稳定性,同时降低了移动性。 或者,更先进的系统使用诸如加速度计或陀螺仪之类的传感器以近似于人类平衡的方式提供动态反馈。 这种传感器也用于运动控制和行走。 这些任务的复杂性有助于机器学习。
简单的双足运动可以通过滚动多边形来近似,其中每一侧的长度与单个步骤的长度匹配。 随着步长变短,边数增加并且运动接近圆的运动。 这将双足运动与轮式运动联系起来作为步幅的限制。
双腿机器人包括:
波士顿动力公司的地图集
玩具机器人,如QRIO和ASIMO。
美国宇航局的Valkyrie机器人,旨在帮助火星上的人类。
乒乓球打TOPIO机器人。
四足
四足或四足机器人表现出四足动作。 它们受益于双足机器人的稳定性增加,特别是在运动过程中。 在低速时,四足机器人一次只能移动一条腿,确保稳定的三脚架。 与双腿系统相比,四足机器人的重心也更低。
四腿机器人包括:
TITAN系列,由Hirose-Yoneda实验室于20世纪80年代开发。
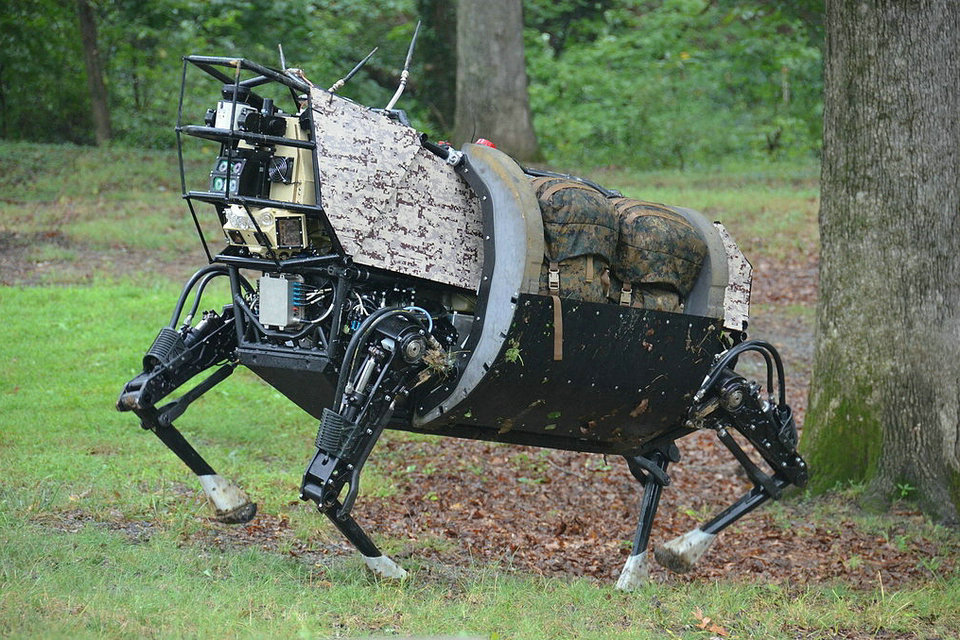
动态稳定的BigDog由波士顿动力公司,美国宇航局喷气推进实验室和哈佛大学协和野战站于2005年开发。
BigDog的继任者,LS3。
六足
六脚机器人或六足机器人的动机是希望获得比双足机器人或四足机器人更大的稳定性。 他们的最终设计经常模仿昆虫的机制,他们的步态可以类似地分类。 这些包括:
波动步态:最慢的步态,其中成对的腿从后向前移动“波浪”。
三脚架步态:稍微快一点,三条腿一次移动。 其余三条腿为机器人提供稳定的三脚架。
六足机器人包括:
Odex,一种由Odetics在20世纪80年代开发的375磅重的六足机器人。 Odex凭借其控制每条腿的机载计算机而脱颖而出。
成吉思汗是最早的自主六足机器人之一,于20世纪80年代由罗德尼布鲁克斯在麻省理工学院开发。
现代玩具系列,Hexbug。
八条腿
八条腿的机器人受到蜘蛛和其他蛛形纲动物以及一些水下步行者的启发。 它们提供了迄今为止最大的稳定性,这使得有腿机器人能够获得一些早期的成功。
八足机器人包括:
Dante,卡内基梅隆大学项目,旨在探索埃里伯斯山。
T8X是一款商用机器人,用于模拟蜘蛛的外观和动作。
杂种
一些机器人使用腿和轮子的组合。 这为机器提供了轮式运动的速度和能量效率以及腿式导航的移动性。 Boston Dynamics’Handle是一种双腿带轮子的双足机器人,就是一个例子。
行走的行为
静态行走
静态行走是指机器人的重心始终高于脚部,因此在没有外力作用的情况下不会摔倒。
动态步行和跑步
动态行走是指机器人的重心也可以在脚部区域之外,而机器人不会掉下来。 事实上,人们可以说“受控制的跌倒”,因为机器人会突然停止运动。
动态行走是指当机器人的腿没有接触地面时保持速度所需的运动。
静态移动机器人
经典的步行机器人包括执行器,传感器和计算机控制。 “腿”通常由伺服电动机移动,以便展开预定的运动程序。
双腿静态行走机器人
机器人ASIMO最大速度为6 km / h,尺寸为1.30 m,重量为52 kg,需要大量电能。 他的特殊能力是他可以爬楼梯。
六足步行机器人
六脚结构是静态稳定步行机器人的理想基础。 因此,它们适合在不平坦的地形上移动。 有两个步态(腿部运动的顺序):
三脚架课程
Tetrapod过渡
三脚架齿轮在任何时候都有三条腿在地面上(例如:印度棒状昆虫,3个站立和3个摆动腿)。
四足动作步态总是在地面上有四条腿(4条腿,2条摆动腿)。
在具有六个正交腿的绑腿的情况下,根据腿部运动原理除了腿部运动的顺序之外还进行区分:
追随者(跟随领导者)(例如三脚架齿轮,四足齿轮)
循环步行者
网络跑步者(编织步行者)
六足动物像追随者一样奔跑。 一条腿跟随(以任何顺序)另一条腿。 机器可以做得更多。 在圆形转轮中,右侧的三条腿具有共同的旋转轴 – 就像时钟的指针(对应于左腿)。 最后面的腿在最前面的腿前摆动。 但最后一条腿怎么通过另外两条腿呢? 它只是在腹部(机器人平台)下摆动。
网络跑步者还进行生物学上不可能的运动。 在网络跑步者中,所有六条腿都坐在平台中心的共同垂直轴上。 每条腿都可以完全围绕整个身体漂移(水平伸缩运动使其成为可能)。 通过绕着外侧的另外两条腿跑动,腿从最后面的位置移动到最前面的位置。
在不平坦的地形上行走时,机器人必须在其步长(立足点选择区域)内找到安全着陆点,而不必偏离其主航向方向太远。
动态步行机器人
被动动态跑步者
可以在没有能量源的情况下移动的运行机器人基于150年前发明的玩具。 它必须被触发,然后可以单独沿着一个小坡度运行。 要做到这一点,玩具从右向左摇摆,并向前摆动腿向前一点。 然后它从左到右摇摆,另一条腿向前摆动。
通过这种结构,玩具可以节能地移动并且用作技术先进的跑步机器人的起始模型。 在20世纪80年代,Tad McGeer使用了摆锤的原理来稳定运动,这是在这个玩具中实现的。 在计算机中不再需要复杂而缓慢的控制系统才能使机器人工作,但肌肉骨骼系统的结构应能稳定运行的机器人而无需额外的动作。 如果简单玩具的构造补充有“臀部”或“可移动的脚”,那么这种行走机器人在加速移动质量时仅需要能量,并且在制动时不再像在早期运行的机器人中那样需要能量。