نظام التحكم الهرمي هو شكل من أشكال نظام التحكم الذي يتم فيه ترتيب مجموعة من الأجهزة والبرامج الحاكمة في شجرة هرمية. عندما يتم تنفيذ الروابط الموجودة في الشجرة بواسطة شبكة كمبيوتر ، فإن نظام التحكم الهرمي هذا هو أيضًا شكل من أشكال نظام التحكم الشبكي.
نظرة عامة
غالبا ما يتم تنظيم نظام مبني من قبل الإنسان بسلوك معقد كتسلسل هرمي. على سبيل المثال ، يحتوي التسلسل الهرمي للأوامر بين ميزاته البارزة على المخطط التنظيمي للرؤساء والمرؤوسين وخطوط الاتصال التنظيمي. نظمت أنظمة الرقابة الهرمية بالمثل لتقسيم مسؤولية اتخاذ القرار.
كل عنصر في التسلسل الهرمي هو عقدة مرتبطة في الشجرة. فالأوامر والمهام والأهداف التي يجب تحقيقها تتدفق من الشجرة من العقد الممتازة إلى العقد الثانوية ، في حين أن الأحاسيس ونتائج الأوامر تتدفق إلى أعلى الشجرة من المرؤوس إلى العقد الأعلى. يمكن للعقد أيضًا تبادل الرسائل مع الأشقاء. ترتبط السمتان المميزتان لنظام التحكم الهرمي بطبقاته.
تعمل كل طبقة أعلى من الشجرة مع فترة زمنية أطول للتخطيط والتنفيذ من الطبقة السفلى على الفور.
الطبقات السفلى لها مهام وأهداف وأحاسيس محلية ، ويتم تخطيط أنشطتها وتنسيقها بواسطة طبقات أعلى لا تتخطى قراراتها بشكل عام. تشكل الطبقات نظامًا ذكيًا هجينًا تكون فيه الطبقات الأقل استجابةً رمزية فرعية. الطبقات العليا ، التي لديها قيود زمنية مريحة ، قادرة على التفكير من نموذج عالمي مجرد وتنفيذ التخطيط. تعتبر شبكة المهام الهرمية مناسبة للتخطيط في نظام تحكم هرمي.
إلى جانب الأنظمة الاصطناعية ، يُقترح تنظيم أنظمة تحكم الحيوانات كتسلسل هرمي. في نظرية التحكم الإدراكي ، التي تفترض أن سلوك الكائن الحي وسيلة للتحكم في تصوراته ، يُقترح أن يتم تنظيم أنظمة التحكم في الكائن الحي في نمط هرمي حيث يتم بناء تصوراته.
هيكل نظام التحكم
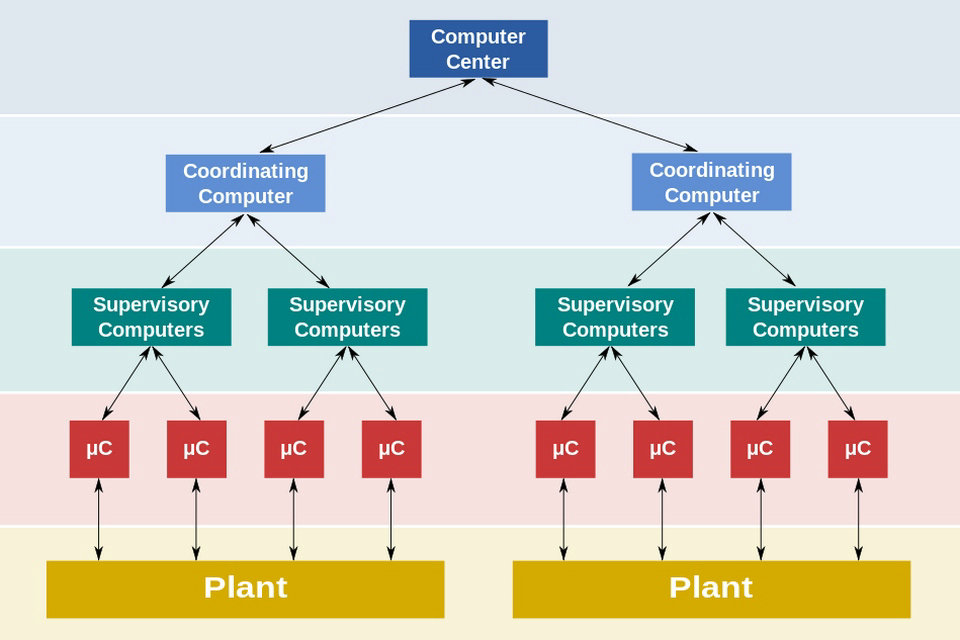
الرسم البياني المصاحب هو نموذج هرمي عام يبين مستويات التصنيع الوظيفية باستخدام التحكم المحوسب في نظام التحكم الصناعي.
بالإشارة إلى المخطط
يحتوي المستوى 0 على الأجهزة الحقلية مثل مستشعرات التدفق ودرجة الحرارة ، وعناصر التحكم النهائية ، مثل صمامات التحكم
يحتوي المستوى 1 على وحدات الإدخال / الإخراج الصناعية (I / O) والمعالجات الإلكترونية الموزعة المرتبطة بها.
يحتوي المستوى 2 على أجهزة الكمبيوتر الإشرافية ، التي تقوم بجمع المعلومات من عقد المعالج على النظام ، وتوفر شاشات التحكم الخاصة بالمشغل.
المستوى 3 هو مستوى التحكم في الإنتاج ، والذي لا يتحكم بشكل مباشر في العملية ، ولكنه يهتم برصد أهداف الإنتاج والرصد
المستوى 4 هو مستوى جدولة الإنتاج.
تطبيقات
التصنيع والروبوتات والمركبات
من بين النماذج الروبوتية النموذج الهرمي الذي يعمل فيه الروبوت بطريقة من أعلى إلى أسفل ، ثقيلًا على التخطيط ، وخاصة التخطيط للحركة. لقد كانت هندسة الإنتاج بمساعدة الكمبيوتر أحد محاور الأبحاث في المعهد القومي للمعايير والتقنية منذ الثمانينيات. تم استخدام مرفق أبحاث التصنيع الآلي الخاص به لتطوير نموذج التحكم في الإنتاج المكون من خمس طبقات. في أوائل التسعينيات ، رعت DARPA بحثًا لتطوير أنظمة تحكم ذكية موزعة (أي شبكة) للتطبيقات مثل أنظمة القيادة والتحكم العسكرية. بنيت NIST على أبحاث سابقة لتطوير نظام التحكم في الوقت الحقيقي (RCS) وبرنامج التحكم في الوقت الحقيقي وهو نظام تحكم هرمي عام والذي تم استخدامه لتشغيل خلية تصنيع ، ورافعة روبوت ، ومركبة آلية.
في نوفمبر 2007 ، عقدت DARPA التحدي العمراني. الدخول الناجح ، استخدم Tartan Racing نظام تحكم هرمي ، مع تخطيط المهام متعدد الطبقات ، تخطيط الحركة ، توليد السلوك ، الإدراك ، النمذجة العالمية ، و mechatronics.
الذكاء الاصطناعي
تعد بنية الاستهلاك الجزئي منهجية لتطوير الذكاء الاصطناعي المرتبط بشكل كبير بالأنظمة الروبوتية القائمة على السلوك. هذه البنية هي طريقة لتحليل السلوك الذكي المعقد في العديد من وحدات السلوك “البسيط” ، والتي بدورها تنظم إلى طبقات. تقوم كل طبقة بتنفيذ هدف معين من وكيل البرامج (أي النظام ككل) ، والطبقات الأعلى بشكل متزايد أكثر تجريدًا. إن هدف كل طبقة يكمن في الطبقات الأساسية ، على سبيل المثال ، يأخذ قرار التحرك إلى الأمام من جانب طبقة الطعام – الطعام في الاعتبار قرار أقل طبقة لتجنب العقبات. ليس من الضروري تخطيط السلوك من خلال طبقة متفوقة ، بل قد يتم تشغيل السلوكيات بواسطة مدخلات حسية وبذلك تكون نشطة فقط في الظروف التي قد تكون مناسبة فيها.
تم استخدام تعلم التعزيز للحصول على السلوك في نظام تحكم هرمي حيث يمكن لكل عقدة أن تتعلم تحسين سلوكها من خلال التجربة.
قام جيمس ألبس ، بينما كان يعمل في المعهد القومي للمعايير والتكنولوجيا ، بتطوير نظرية لتصميم نظام ذكي يدعى “العمارة النموذجية المرجعية” (RMA) ، وهو نظام تحكم هرمي مستوحى من نظام أر سي أس. يحدد ألبوس كل عقدة لاحتواء هذه المكونات.
جيل السلوك مسؤول عن تنفيذ المهام المستلمة من العقدة الرئيسية العليا. كما تخطط ، وتصدر المهام إلى ، العقد التابعة.
الإدراك الحسي هو المسؤول عن تلقي الأحاسيس من العقد الثانوية ، ثم التجميع ، والترشيح ، ومعالجتها بطريقة أخرى إلى تجريدات مستوى أعلى تقوم بتحديث الحالة المحلية والتي تشكل الأحاسيس التي يتم إرسالها إلى العقدة العليا.
حكم القيمة هو المسؤول عن تقييم الوضع المحدث وتقييم الخطط البديلة.
النموذج العالمي هو الحالة المحلية التي توفر نموذجًا للنظام الخاضع للتحكم أو العملية الخاضعة للرقابة أو البيئة عند مستوى التجريد للعقد الثانوية.
في أدنى مستوياته ، يمكن تنفيذ RMA كهيكل فرعي ، حيث يتم تعيين النموذج العالمي بشكل مباشر إلى العملية الخاضعة للرقابة أو العالم الحقيقي ، وتجنب الحاجة إلى التجريد الرياضي ، وفي أي تخطيط تفاعلي مقيّد بالوقت يمكن تنفيذه كآلة حالة محدودة. ومع ذلك ، قد تشتمل المستويات الأعلى من RMA على نماذج وعلامات رياضية رياضية متطورة يتم تنفيذها عن طريق التخطيط الآلي والجدولة. مطلوب التخطيط عندما لا يمكن تشغيل سلوكيات معينة من خلال الأحاسيس الحالية ، ولكن بالأحاسيس المتوقعة أو المتوقعة ، وخاصة تلك التي تأتي كنتيجة لأفعال العقدة.