Ein hierarchisches Steuersystem ist eine Form eines Steuersystems, bei dem ein Satz von Geräten und Steuerungssoftware in einem hierarchischen Baum angeordnet ist. Wenn die Verknüpfungen in der Baumstruktur von einem Computernetzwerk implementiert werden, ist dieses hierarchische Steuersystem auch eine Form eines vernetzten Steuersystems.
Überblick
Ein von Menschen erstelltes System mit komplexem Verhalten wird oft als Hierarchie organisiert. Beispielsweise umfasst eine Befehlshierarchie unter anderem das Organigramm der Vorgesetzten, Untergebenen und Linien der Organisationskommunikation. Hierarchische Kontrollsysteme sind ähnlich organisiert, um die Entscheidungsverantwortung aufzuteilen.
Jedes Element der Hierarchie ist ein verknüpfter Knoten in der Baumstruktur. Befehle, Aufgaben und Ziele, die erreicht werden sollen, fließen von übergeordneten Knoten zu untergeordneten Knoten hinab, während Empfindungen und Befehlsergebnisse den Baum von untergeordneten zu übergeordneten Knoten hinauffließen. Knoten können auch Nachrichten mit ihren Geschwistern austauschen. Die zwei Unterscheidungsmerkmale eines hierarchischen Steuerungssystems beziehen sich auf seine Schichten.
Jede höhere Schicht des Baums arbeitet mit einer längeren Planungs- und Ausführungszeit als die unmittelbar darunter liegende Schicht.
Die unteren Schichten haben lokale Aufgaben, Ziele und Empfindungen, und ihre Aktivitäten werden von höheren Schichten geplant und koordiniert, die ihre Entscheidungen im Allgemeinen nicht überschreiben. Die Schichten bilden ein hybrides intelligentes System, in dem die untersten reaktiven Schichten Untersymbolik sind. Die höheren Schichten mit entspannten Zeitbeschränkungen können aus einem abstrakten Weltmodell schließen und Planung durchführen. Ein hierarchisches Task-Netzwerk passt gut zur Planung in einem hierarchischen Steuerungssystem.
Neben künstlichen Systemen wird vorgeschlagen, die Kontrollsysteme eines Tieres als Hierarchie zu organisieren. In der Theorie der perzeptuellen Kontrolle, die postuliert, dass das Verhalten eines Organismus ein Mittel zur Kontrolle seiner Wahrnehmungen ist, wird vorgeschlagen, dass die Kontrollsysteme des Organismus in einem hierarchischen Muster organisiert sind, wenn ihre Wahrnehmungen so aufgebaut sind.
Steuersystemstruktur
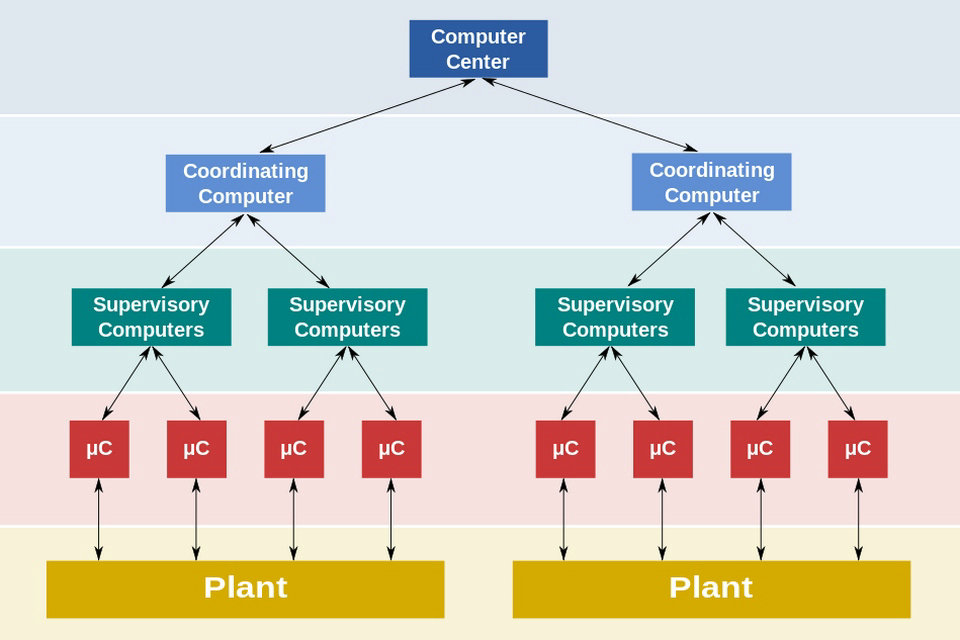
Das beigefügte Diagramm ist ein allgemeines hierarchisches Modell, das funktionale Fertigungsebenen mithilfe einer computergesteuerten Steuerung eines industriellen Steuersystems zeigt.
Unter Bezugnahme auf das Diagramm;
Ebene 0 enthält die Feldgeräte wie Durchfluss- und Temperatursensoren und Stellglieder wie Steuerventile
Stufe 1 enthält die industrialisierten E / A-Module und die zugehörigen verteilten elektronischen Prozessoren.
Ebene 2 enthält die Überwachungscomputer, die Informationen von Prozessorknoten im System zusammenstellen und die Bedienbildschirme bereitstellen.
Stufe 3 ist die Produktionskontrollstufe, die den Prozess nicht direkt steuert, sondern die Überwachung der Produktions- und Überwachungsziele betrifft
Stufe 4 ist die Produktionsplanungsebene.
Anwendungen
Fertigung, Robotik und Fahrzeuge
Zu den Roboter-Paradigmen gehört das hierarchische Paradigma, bei dem ein Roboter von oben nach unten arbeitet und planungsintensiv ist, insbesondere Bewegungsplanung. Computergestützte Produktionstechnik ist seit den 1980er Jahren ein Forschungsschwerpunkt am NIST. In seiner Forschungsanlage für automatisierte Fertigung wurde ein fünfstufiges Produktionskontrollmodell entwickelt. In den frühen 1990er Jahren finanzierte DARPA Forschungen zur Entwicklung verteilter (dh vernetzter) intelligenter Steuersysteme für Anwendungen wie militärische Befehls- und Kontrollsysteme. NIST knüpfte an frühere Forschungsarbeiten an, um sein Echtzeitsteuerungssystem (Real-Time Control System, RCS) und Echtzeitsteuerungssystemsoftware zu entwickeln. Hierbei handelt es sich um ein generisches hierarchisches Steuerungssystem, das zum Betrieb einer Fertigungszelle, eines Roboterkrans und eines automatisierten Fahrzeugs verwendet wurde.
Im November 2007 veranstaltete DARPA die Urban Challenge. Tartan Racing wählte den Gewinner mit einem hierarchischen Kontrollsystem aus, mit mehrstufiger Missionsplanung, Bewegungsplanung, Verhaltensgenerierung, Wahrnehmung, Weltmodellierung und Mechatronik.
Künstliche Intelligenz
Subsumption-Architektur ist eine Methode zur Entwicklung künstlicher Intelligenz, die stark mit verhaltensbasierter Robotik verbunden ist. Diese Architektur ist eine Möglichkeit, kompliziertes intelligentes Verhalten in viele „einfache“ Verhaltensmodule zu zerlegen, die wiederum in Schichten organisiert sind. Jede Schicht implementiert ein bestimmtes Ziel des Software-Agenten (dh das System als Ganzes), und höhere Schichten werden zunehmend abstrakter. Das Ziel jeder Schicht fasst das der darunter liegenden Schichten zusammen, z. B. berücksichtigt die Entscheidung, ob sich die Ess-Lebensmittel-Schicht vorwärts bewegt, die Entscheidung der untersten Hindernisvermeidungs-Schicht. Verhalten muss nicht von einer übergeordneten Schicht geplant werden, vielmehr können Verhaltensweisen durch sensorische Eingaben ausgelöst werden und sind daher nur unter Umständen aktiv, wenn sie angemessen sind.
Verstärktes Lernen wurde verwendet, um Verhalten in einem hierarchischen Steuersystem zu erlangen, in dem jeder Knoten lernen kann, sein Verhalten mit Erfahrung zu verbessern.
James Albus entwickelte während seiner Zeit bei NIST eine Theorie für intelligentes Systemdesign mit dem Namen Reference Model Architecture (RMA), einem hierarchischen Steuersystem, das von RCS inspiriert wurde. Albus definiert, dass jeder Knoten diese Komponenten enthält.
Die Verhaltensgenerierung ist für die Ausführung von Aufgaben verantwortlich, die vom übergeordneten übergeordneten Knoten empfangen werden. Es plant auch Aufgaben für untergeordnete Knoten und gibt diese an diese aus.
Die sensorische Wahrnehmung ist dafür verantwortlich, Empfindungen von den untergeordneten Knoten zu empfangen, sie dann zu gruppieren, zu filtern und anderweitig in Abstraktionen höherer Ebene zu verarbeiten, die den lokalen Zustand aktualisieren und die Empfindungen bilden, die an den übergeordneten Knoten gesendet werden.
Das Werturteil ist für die Bewertung der aktualisierten Situation und die Bewertung alternativer Pläne verantwortlich.
Weltmodell ist der lokale Zustand, der ein Modell für das kontrollierte System, den kontrollierten Prozess oder die Umgebung auf der Abstraktionsebene der untergeordneten Knoten bereitstellt.
Auf den niedrigsten Ebenen kann die RMA als Subsumtionsarchitektur implementiert werden, in der das Weltmodell direkt auf den kontrollierten Prozess oder die reale Welt abgebildet wird, wodurch keine mathematische Abstraktion erforderlich ist und in dem zeitabhängige reaktive Planung implementiert werden kann als endliche Staatsmaschine. Bei höheren RMA-Werten können jedoch ausgefeilte mathematische Weltmodelle und Verhaltensweisen durch automatisierte Planung und Zeitplanung implementiert werden. Planung ist erforderlich, wenn bestimmte Verhaltensweisen nicht durch aktuelle Empfindungen ausgelöst werden können, sondern durch vorhergesagte oder erwartete Empfindungen, insbesondere solche, die als Ergebnis der Aktionen des Knotens entstehen.