Un sistema di controllo gerarchico è una forma di sistema di controllo in cui un insieme di dispositivi e software di governo è disposto in un albero gerarchico. Quando i collegamenti nell’albero sono implementati da una rete di computer, allora quel sistema di controllo gerarchico è anche una forma di sistema di controllo in rete.
Panoramica
Un sistema costruito dall’uomo con un comportamento complesso è spesso organizzato come una gerarchia. Ad esempio, una gerarchia di comandi ha tra le sue caratteristiche notevoli l’organigramma di superiori, subordinati e linee di comunicazione organizzativa. I sistemi di controllo gerarchico sono organizzati in modo simile per dividere la responsabilità decisionale.
Ogni elemento della gerarchia è un nodo collegato nell’albero. I comandi, i compiti e gli obiettivi da raggiungere scendono dall’albero dai nodi superiori ai nodi subordinati, mentre le sensazioni e i risultati dei comandi fluiscono nell’albero da nodi subordinati a superiori. I nodi possono anche scambiare messaggi con i loro fratelli. Le due caratteristiche distintive di un sistema di controllo gerarchico sono legate ai suoi livelli.
Ogni livello superiore dell’albero opera con un intervallo più lungo di pianificazione e tempo di esecuzione rispetto al livello immediatamente inferiore.
Gli strati inferiori hanno compiti, obiettivi e sensazioni locali, e le loro attività sono pianificate e coordinate da strati superiori che generalmente non annullano le loro decisioni. Gli strati formano un sistema ibrido intelligente in cui gli strati reattivi più bassi sono sub-simbolici. Gli strati più alti, che hanno limiti di tempo rilassati, sono in grado di ragionare da un modello del mondo astratto e dalla pianificazione dello spettacolo. Una rete di compiti gerarchici è adatta per la pianificazione in un sistema di controllo gerarchico.
Oltre ai sistemi artificiali, si propone che i sistemi di controllo di un animale siano organizzati come una gerarchia. Nella teoria del controllo percettivo, che postula che il comportamento di un organismo è un mezzo per controllarne le percezioni, i sistemi di controllo dell’organismo sono suggeriti per essere organizzati in un modello gerarchico come le loro percezioni sono costruite così.
Struttura del sistema di controllo
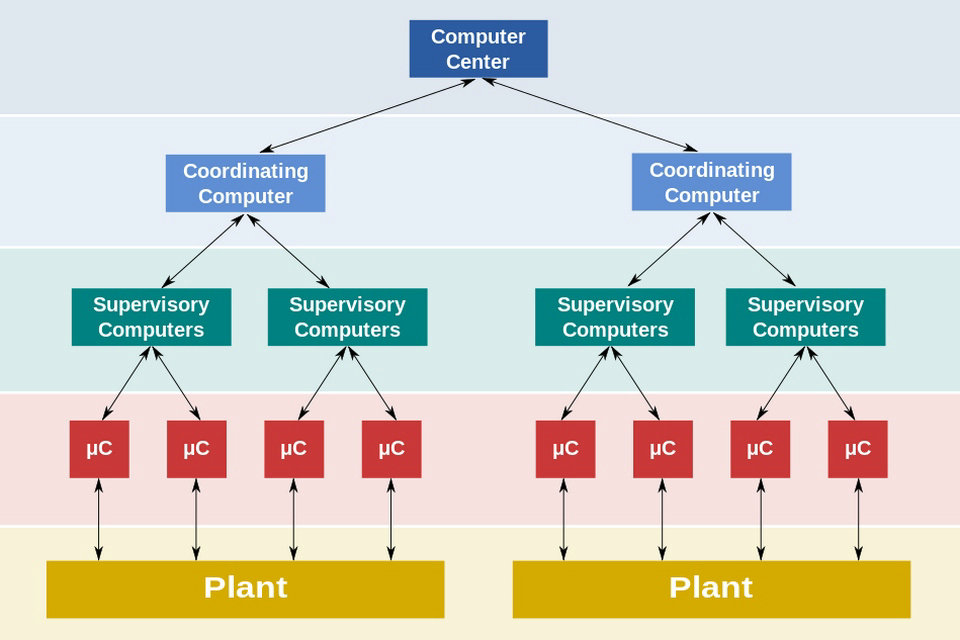
Il diagramma che lo accompagna è un modello gerarchico generale che mostra i livelli di produzione funzionale utilizzando il controllo computerizzato di un sistema di controllo industriale.
Riferendosi allo schema;
Il livello 0 contiene i dispositivi di campo come i sensori di flusso e temperatura e gli elementi di controllo finali, come le valvole di controllo
Il livello 1 contiene i moduli di input / output (I / O) industrializzati e i relativi processori elettronici distribuiti.
Il livello 2 contiene i computer di supervisione, che raccolgono le informazioni dai nodi del processore sul sistema e forniscono le schermate di controllo dell’operatore.
Il livello 3 è il livello di controllo della produzione, che non controlla direttamente il processo, ma riguarda il monitoraggio degli obiettivi di produzione e monitoraggio
Il livello 4 è il livello di pianificazione della produzione.
applicazioni
Produzione, robotica e veicoli
Tra i paradigmi robotici c’è il paradigma gerarchico in cui un robot opera in modo top-down, pesante sulla pianificazione, in particolare sulla pianificazione del movimento. L’ingegneria della produzione assistita dal computer è stata oggetto di ricerca presso il NIST sin dagli anni ’80. Il suo impianto di ricerca automatizzata per la produzione è stato utilizzato per sviluppare un modello di controllo della produzione a cinque livelli. Nei primi anni ’90 DARPA ha sponsorizzato la ricerca per sviluppare sistemi di controllo intelligenti distribuiti (cioè collegati in rete) per applicazioni come i sistemi di comando e controllo militari. Il NIST si è basato su precedenti ricerche per sviluppare il proprio sistema di controllo in tempo reale (RCS) e il software del sistema di controllo in tempo reale, un sistema di controllo gerarchico generico che è stato utilizzato per azionare una cella di produzione, una gru robotizzata e un veicolo automatizzato.
Nel novembre 2007, DARPA ha tenuto l’Urban Challenge. L’ingresso vincente, Tartan Racing ha utilizzato un sistema di controllo gerarchico, con pianificazione delle missioni a strati, pianificazione del movimento, generazione del comportamento, percezione, modellazione del mondo e meccatronica.
Intelligenza artificiale
L’architettura del sussidio è una metodologia per lo sviluppo dell’intelligenza artificiale che è fortemente associata alla robotica basata sul comportamento. Questa architettura è un modo di scomporre il comportamento intelligente complicato in molti moduli di comportamento “semplici”, che sono a loro volta organizzati in strati. Ogni livello implementa un particolare obiettivo dell’agente software (vale a dire il sistema nel suo complesso) e gli strati superiori sono sempre più astratti. L’obiettivo di ogni livello sussume quello degli strati sottostanti, ad es. la decisione di andare avanti con lo strato cibo-cibo prende in considerazione la decisione del livello più basso di evitare gli ostacoli. Il comportamento non deve essere pianificato da uno strato superiore, piuttosto i comportamenti possono essere innescati da input sensoriali e quindi sono attivi solo in circostanze in cui potrebbero essere appropriati.
L’apprendimento di rinforzo è stato utilizzato per acquisire comportamenti in un sistema di controllo gerarchico in cui ogni nodo può imparare a migliorare il suo comportamento con l’esperienza.
James Albus, mentre al NIST, ha sviluppato una teoria per la progettazione di sistemi intelligenti denominata Reference Model Architecture (RMA), che è un sistema di controllo gerarchico ispirato a RCS. Albus definisce ciascun nodo per contenere questi componenti.
La generazione del comportamento è responsabile dell’esecuzione delle attività ricevute dal nodo principale superiore. Inoltre pianifica ed emette compiti sui nodi subordinati.
La percezione sensoriale è responsabile della ricezione di sensazioni dai nodi subordinati, quindi il raggruppamento, il filtraggio e in altro modo l’elaborazione in astrazioni di livello superiore che aggiornano lo stato locale e che formano le sensazioni inviate al nodo superiore.
Il giudizio sul valore è responsabile della valutazione della situazione aggiornata e della valutazione di piani alternativi.
World Model è lo stato locale che fornisce un modello per il sistema controllato, il processo controllato o l’ambiente al livello di astrazione dei nodi subordinati.
Ai suoi livelli più bassi, l’RMA può essere implementato come un’architettura di sussunzione, in cui il modello del mondo viene mappato direttamente al processo controllato o al mondo reale, evitando la necessità di un’astrazione matematica e in cui è possibile implementare una pianificazione reattiva limitata nel tempo come una macchina a stati finiti. Livelli più elevati di RMA possono tuttavia avere sofisticati modelli matematici del mondo e comportamenti implementati mediante pianificazione e pianificazione automatizzate. La pianificazione è necessaria quando determinati comportamenti non possono essere innescati dalle sensazioni correnti, ma piuttosto da sensazioni previste o anticipate, specialmente quelle che risultano come risultato delle azioni del nodo.