هيكل الاستدامة هو بنية روبوتية تفاعلية ترتبط بشكل كبير مع الروبوتات المستندة إلى السلوك والتي كانت تحظى بشعبية كبيرة في الثمانينيات والتسعينيات. وقد أدخل هذا المصطلح رودني بروكس وزملاؤه في عام 1986. وقد كان الاستنفاذ مؤثرا على نطاق واسع في مجال الروبوتات الذاتية وفي أماكن أخرى في الذكاء الاصطناعي في الوقت الحقيقي.
نظرة عامة
هيكل اإلعارة هو بنية تحكم تم اقتراحها معارضة لمنظمة العفو الدولية التقليدية أو GOFAI. فبدلاً من توجيه السلوك من خلال تمثيلات عقلية رمزية للعالم ، فإن فن العمارة الفرعية يربط بين المعلومات الحسية واختيار العمل بطريقة حميمة من أسفل إلى أسفل.
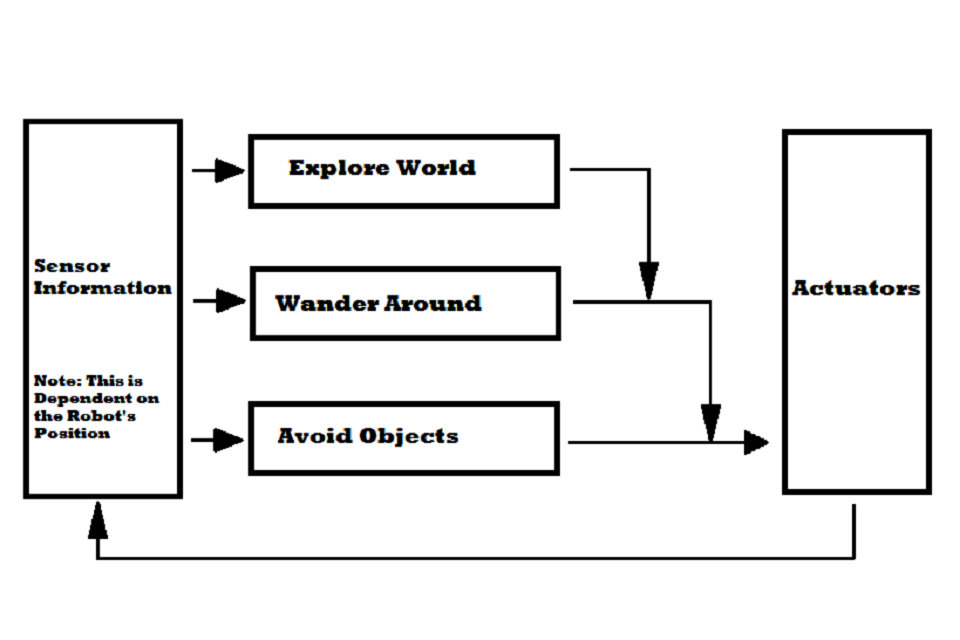
يقوم بذلك عن طريق تحليل السلوك الكامل إلى سلوكيات فرعية. يتم تنظيم هذه السلوكيات الفرعية في تسلسل هرمي للطبقات. تقوم كل طبقة بتنفيذ مستوى معين من الكفاءة السلوكية ، وتكون المستويات الأعلى قادرة على استيعاب المستويات الأدنى (= دمج / دمج المستويات الأدنى إلى مجموعة شاملة أكثر) من أجل خلق سلوك قابل للتطبيق. على سبيل المثال ، يمكن أن تكون طبقة الروبوت الأقل “تجنب كائن”. الطبقة الثانية ستكون “التجول” ، التي تمتد تحت الطبقة الثالثة “استكشاف العالم”. نظرًا لأن الروبوت يجب أن يكون لديه القدرة على “تجنب الأشياء” من أجل “التجوال” بشكل فعال ، فإن بنية القطع الفرعية تنشئ نظامًا تستخدم فيه الطبقات العليا كفاءات المستوى الأدنى. الطبقات ، التي تتلقى جميع المعلومات المستشعر ، العمل بالتوازي وتوليد المخرجات. يمكن أن تكون هذه المخرجات أوامر إلى مشغلات أو إشارات تمنع أو تثبط الطبقات الأخرى.
الخصائص
البدنية
يتم تجسيد وكلاء بطريقة أو بأخرى في البيئة ، لديهم هيئة مع أجهزة الاستشعار والمحركات ، وأنهم يرون والتفاعل مع التغيرات في البيئة.
موقف
الوكلاء هم جزء من بيئة العالم الحقيقي التي يتفاعلون معها. هذا يؤثر على سلوك الوكيل.
المخابرات
يتم تشكيل الذكاء من وكيل في الغالب من اصطدام الوكيل مع البيئة الحقيقية ، وردود فعله والمحفزات.
الظهور
ذكاء النظام ، ككل ، ينشأ بطريقة ناشئة ، وهذا هو ، التفاعل بين أجزائه الفردية.
لا يوجد تمثيل واضح للمعرفة
لا تملك بنية Subsoup نموذجًا واضحًا للعالم. هذا يعني أن الروبوت ليس لديه نظرة مبسطة للعالم المحيط. فوائد واضحة. لا يقوم الوكلاء بعمل تنبؤات حول العالم ، حتى يتمكنوا من العمل بشكل جيد في بيئة غير متوقعة. توفيرا للوقت للقراءة والكتابة. كما يوفر أيضًا وقت الخوارزمية المستخدمة في هذا النموذج. ستكون هناك أيضًا مشاكل في نموذج عالمي لا يضطر إلى مطابقة العالم الحقيقي. ولكن لها أيضا عيوبها. النظام ثم رد الفعل بحتة. هذا يعني أنها تستجيب فقط لما يحدث في العالم. بعبارة أخرى ، يحدد العالم ما يريد القيام به.
توزيع
ينتشر السلوك بين أوتوماتا المحدودة التي تؤدي مهام مختلفة. ونتيجة لذلك ، يمكنهم الاستجابة للأحداث التنافسية في البيئة. السلوك الكلي هو المبلغ التقريبي للأوتومات المحدودة. بنية النظام الفرعي متوازية وغير متزامنة لأن التشغيل التلقائي المحدود يعمل بشكل مستقل عن بعضها البعض. جميع الأجهزة النهائية تعمل باستمرار ، ولأنها يمكن أن يكون لها توقيتها الخاص ، فهي لا تحتاج إلى التزامن.
طبقات
تتكون البنية التحتية تحت السطحية من طبقات حيث يقوم كل منها بتنفيذ سلوك معين ويتكون من واحد أو أكثر من الآلات الأوتوماتيكية المحدودة. تعتبر بنية النظام الفرعي نموذجية لأن كل إنسان آلي محدود يقوم بمهمة مستقلة. يحتوي كل جهاز نهائي على عدد من خطوط الإدخال والإخراج. الأجهزة النهائية هي معالجات ترسل رسائل إلى بعضها البعض وتكون قادرة على تخزين هياكل البيانات. تعمل المعالجات بشكل غير متزامن وتكون متساوية بالتساوي. انهم يرصدون مدخلاتهم وإرسال التقارير إلى المخرجات. يأخذ الجهاز النهائي دائمًا بعين الاعتبار أحدث رسالة تم تلقيها. لهذا السبب ، قد يتم فقد الرسالة في حالة وصول الرسالة الجديدة قبل معالجة الرسالة القديمة. لا يوجد تحكم داخل الطبقة ، ولا يوجد أي شكل آخر من أشكال الاتصال بين المعالجات ، أي لا توجد ذاكرة مشتركة. كل وحدة يهتم فقط عن مهمتها. يمكن للطبقات الأعلى الوصول إلى المستشعرات والتأثير على سلوك الطبقات السفلى من خلال الحد من المدخلات أو عن طريق قمع مخرجات بعض أنواع الأوتوماتيكية المحدودة عند مستويات منخفضة.
هذه هي الآلية التي تتضمن الطبقات العليا دور الطبقات السفلى.
التنقل
إن أهم عامل للقدرة على أساس بنية المحتوى هو التحرك في جميع أنحاء العالم وتجنب تحريك وتحريك الأشياء. تعتبر الملاحة واحدة من المهام الرئيسية التي يتعين على الوكلاء القيام بها ، وهذه المهمة شديدة التفاعل (مقارنة بالعوامل المعرفية الأخرى). يتم التنقل في الغالب في عدة طبقات. تتفادى الوحدة الأقل الأجسام (حتى لأولئك الذين يظهرون فجأة) والمستوى الأعلى يقود العامل في اتجاه معين ويتجاهل العقبات. يوفر هذا المزيج طريقة سهلة للوصول من A إلى B بدون تخطيط مسار واضح.
آخر
يعمل العملاء في الوقت الفعلي ويتم تصميمهم بشكل أساسي للتحرك في عالم حقيقي ودينامي ومعقد.
أسباب المنشأ
كان أحد أسباب إنشاء بنية المحتوى الأساسي هو حقيقة أن المؤلفين أرادوا التعامل مع المتطلبات والاحتياجات التالية لإنشاء روبوتات متنقلة مستقلة.
العديد من الأهداف
يمكن أن يكون لدى الروبوت أهداف أكثر تتعارض مع بعضها البعض وتحتاج إلى معالجتها بطريقة ما. على سبيل المثال ، يمكن أن يحاول الروبوت الوصول إلى نقطة معينة أمامه وفي نفس الوقت يحتاج إلى تجنب العقبات التي تعترض طريقه. كما تحتاج إلى الوصول إلى مكان ما في أقصر وقت ممكن وفي نفس الوقت يجب أن تحفظ مواردها من الطاقة. لذلك من الواضح أن أهمية وأولويات الأهداف هي نسبية وتعتمد على السياق. ومن المؤكد أنه من الأهمية بمكان سحب المسارات عندما يذهب القطار ، قبل التحقق من عوارض المسار في ذلك الوقت.
المزيد من أجهزة الاستشعار
يمكن أن يكون لدى الروبوت أجهزة استشعار متعددة (كاميرات وأجهزة استشعار بالأشعة تحت الحمراء وأجهزة استشعار صوتية ، إلخ). جميع أجهزة الاستشعار قد يخطئ. بالإضافة إلى ذلك ، لا توجد في كثير من الأحيان علاقة تحليلية مباشرة بين قيم أجهزة الاستشعار والكميات المادية المطلوبة. قد تتداخل بعض المستشعرات في المناطق التي تقيسها. غالبًا ما تحدث قراءات غير متناسقة – أحيانًا بسبب فشل جهاز الاستشعار وأحيانًا بسبب ظروف القياس – إذا تم استخدام المستشعر خارج نطاقه. في كثير من الأحيان ، لا تتوفر الخصائص التحليلية الدقيقة للنطاق. يجب أن يكون الروبوت قادرا على اتخاذ القرار في ظل الشروط المذكورة أعلاه.
متانة
يجب أن يكون الروبوت قويًا. عندما تفشل بعض أجهزة الاستشعار ، يجب أن تكون قادرة على التكيف والتعامل مع الاعتماد فقط على تلك التي تعمل. عندما تتغير البيئة بشكل جذري ، يجب أن تكون قادرة على تحقيق بعض السلوكيات المعقولة – بدلاً من البقاء في حالة صدمة أو بلا رحمة أو لا حول لها. كما أنه من المناسب إذا كان يمكن أن يستمر إذا حدثت أخطاء على معالجاتها.
قابلية التوسع
عندما تتم إضافة المزيد من الروبوتات إلى الروبوت ، فإنها تحتاج إلى سعة معالجة أكبر ، وإلا قد تتعرض قدراتها الأصلية للانزعاج مع مرور الوقت.
هدف
يهاجم هيكل الاستغناء مشكلة الذكاء من منظور مختلف اختلافاً من الذكاء الاصطناعي التقليدي. وبخيبة أمله مع أداء Shakey للروبوت والمشاريع الواضحة المتمثلة في التمثيل الذهني ، بدأ Rodney Brooks في إنشاء روبوتات مبنية على فكرة مختلفة من الذكاء ، تشبه عمليات العقل اللاواعية. بدلاً من نمذجة جوانب الذكاء البشري من خلال التلاعب بالرموز ، يهدف هذا النهج إلى التفاعل في الوقت الفعلي والاستجابات القابلة للتطبيق إلى مختبر ديناميكي أو بيئة مكتبية.
تم ابتكار الهدف من خلال أربعة أفكار رئيسية:
الموقع – الفكرة الرئيسية التي تقع في الذكاء الاصطناعي هو أن الروبوت يجب أن يكون قادراً على الاستجابة لبيئته في إطار زمني شبيه بالإنسان. يجادل بروكس بأن الروبوت الموجود في الجوال لا ينبغي أن يمثل العالم عبر مجموعة من الرموز الداخلية ومن ثم يعمل على هذا النموذج. بدلاً من ذلك ، يدعي أن “العالم هو أفضل نموذج خاص به” ، مما يعني أنه يمكن استخدام الإعداد الصحيح للإدراك الفعلي للعمل على التفاعل المباشر مع العالم بدلاً من تصميمه. ومع ذلك ، فإن كل وحدة نمطية / سلوك ما زالت تشكل نموذجًا للعالم ، ولكن على مستوى منخفض جدًا ، على مقربة من إشارات الحواس. هذه النماذج البسيطة تستخدم بالضرورة فرضيات ضمنية حول العالم المشفر في الخوارزميات نفسها ، ولكنها تتجنب استخدام الذاكرة للتنبؤ بسلوك العالم ، بدلاً من الاعتماد على الملاحظات الحسية المباشرة قدر الإمكان.
تجسيد – بروكس يجادل بناء عامل يجسد ينجز أمرين. الأول هو أنه يجبر المصمم على اختبار وإنشاء نظام تحكم مدمج متكامل ، وليس نماذج نظرية أو محاكاة الروبوتات التي قد لا تعمل في العالم المادي. والثاني هو أنه يمكن حل مشكلة التأريخ رمز ، قضية فلسفية العديد من لقاءات AIs التقليدية ، من خلال ربط البيانات المعنوية مباشرة إلى إجراءات ذات مغزى. إن “التراجع العالمي للأسباب” ، والعلاقة الداخلية للطبقات السلوكية ترتكز بشكل مباشر على العالم الذي يدركه الروبوت.
الذكاء – بالنظر إلى التقدم التطوري ، يجادل بروكس بأن تطوير المهارات الإدراكية والحركية هي أساس ضروري للذكاء الشبيه بالإنسان. أيضا ، من خلال رفض التمثيل من أعلى إلى أسفل كنقطة انطلاق قابلة للتطبيق لمنظمة العفو الدولية ، يبدو أن “يتم تحديد الذكاء بواسطة ديناميات التفاعل مع العالم.”
الظهور – بشكل تقليدي ، لا تعتبر الوحدات الفردية ذكية بحد ذاتها. هو تفاعل هذه الوحدات ، التي يتم تقييمها من خلال مراقبة العامل وبيئته ، والتي عادة ما تعتبر ذكية (أو لا). “الذكاء” ، لذلك ، “هو في عين المراقب”.
الأفكار المبينة أعلاه لا تزال جزءًا من جدل مستمر حول طبيعة الذكاء وكيف يجب تعزيز تقدم الروبوتات و الذكاء الاصطناعي.
طبقات وآلات متناهية الصغر
وتتكون كل طبقة من مجموعة من المعالجات التي تزيد من آلات الحالة المحدودة (AFSM) ، إضافة إلى زيادة المتغيرات المثيلات على سبيل المثال لاجراء هياكل البيانات القابلة للبرمجة. الطبقة هي وحدة نمطية وهي مسؤولة عن هدف سلوكي واحد ، مثل “التجول”. لا توجد سيطرة مركزية داخل أو بين هذه الوحدات السلوكية. جميع AFSMs باستمرار وتلقي بشكل غير متزامن المدخلات من أجهزة الاستشعار ذات الصلة وإرسال المخرجات إلى المحركات (أو غيرها من AFSMs). في نهاية المطاف ، يتم التخلص من إشارات الإدخال التي لا يتم قراءتها في الوقت الذي يتم فيه تسليم إشارة جديدة. هذه الإشارات المهملة شائعة ، وهي مفيدة للأداء لأنها تسمح للنظام بالعمل في الوقت الحقيقي من خلال التعامل مع المعلومات الأكثر إلحاحًا.
نظرًا لعدم وجود تحكم مركزي ، تتواصل AFSM مع بعضها البعض عن طريق تثبيط وإشارات القمع. إشارات منع إشارات المنع من الوصول إلى المحركات أو AFSM ، وإشارات القمع تمنع أو تحل محل المدخلات إلى الطبقات أو AFSMs الخاصة بها. هذا النظام من اتصالات AFSM هو كيف أن الطبقات الأعلى تستوعب الطبقات الأدنى (انظر الشكل 1) ، وكذلك كيفية تعامل البنية مع الأولوية وتحكيم اختيار العمل بشكل عام.
تطور الطبقات يتبع تطور بديهية. أولاً يتم إنشاء الطبقة الأدنى واختبارها وتصحيحها. وبمجرد تشغيل هذا المستوى الأدنى ، يقوم المرء بإنشاء الطبقة الثانية وإرفاقها مع وصلات تثبيط وتثبيط مناسبة للطبقة الأولى. بعد اختبار وتصحيح السلوك المدمج ، يمكن تكرار هذه العملية (نظريا) أي عدد من الوحدات السلوكية.: 16-20
مميزات
واعترافًا بما تقدم ، قرر المؤلفون اتباع الإجراء الذي يشكل أساسًا لبنية التضمين. تعاملوا مع مشكلة إنشاء الروبوت عموديا على أساس المظاهر الخارجية المرغوبة لنظام التحكم بدلا من عملية الروبوت الداخلية. ثم حددوا ما يسمى مستويات الكفاءة. مستوى الكفاءة هو تحديد المستوى المطلوب لسلوك الروبوت فيما يتعلق بجميع البيئات التي تتحرك فيها. مستوى أعلى من الكفاءة يعني مستوى أكثر تحديدًا من السلوك. والفكرة الرئيسية لمستويات الكفاءة هي أنه من الممكن إنشاء طبقات من نظام التحكم تتوافق مع مستوى معين من الكفاءة وتضيف ببساطة طبقة جديدة إلى مجموعة موجودة.
حدد بروكس وفريقه مستويات الكفاءة التالية في عام 1986:
تجنب ملامسة الأشياء (بغض النظر عما إذا كانت تتحرك أو ثابتة)
1. استيقظ بدون هدف بدون صراع مع الأشياء
2. “استكشف” العالم من خلال البحث عن الأماكن في متناول اليد
3. بناء خريطة للبيئة وتخطيط رحلتك من مكان إلى آخر
4. سجل التغييرات في البيئات الثابتة
5. النظر في العالم من حيث الكائنات القابلة للتحديد وإجراء المهام المرتبطة بهذه الأشياء
6. صياغة وتنفيذ الخطط التي تتطلب التغيير في حالة العالم بطريقة مرغوبة
7. النظر في سلوك الكائنات في العالم وتعديلها وفقًا لذلك
قام المؤلفون في البداية ببناء نظام كامل للتحكم في الروبوت يحقق كفاءات المستوى صفر ويتم فحصه بدقة. طبقة أخرى تسمى المستوى الأول من نظام التحكم. وهي قادرة على معالجة البيانات من طبقة الصفر في النظام ، كما يسمح لها بإدخال بيانات في واجهات داخلية ذات مستوى صفري ، مما يحد من معدل البت العادي. والمبدأ هو أن الطبقة الصفرية تستمر في العمل ولا تعرف أي شيء عن الطبقة التي فوقها تتداخل أحيانًا مع مسارات البيانات. هذه الطبقة قادرة على الوصول إلى كفاءات المستوى الأول بمساعدة طبقة الصفر. يتم تكرار نفس العملية لتحقيق مستوى أعلى من الكفاءة. انظر إلى الشكل 3. في اللحظة التي تم فيها إنشاء الطبقة الأولى ، يتوفر بالفعل جزء فعال من نظام التحكم. يمكن إضافة طبقات إضافية لاحقًا ، وقد لا يتم تبديل النظام.
العديد من الاهداف
يمكن للطبقات الفردية العمل على الأهداف الفردية في وقت واحد. ثم تقوم آلية المنع بتوسط الإجراءات التي يتم أخذها في الاعتبار. الميزة هي أنه قد لا يكون هناك قرار مسبق بشأن الهدف الذي يجب اتخاذه.
أجهزة الاستشعار متعددة
قد لا تكون جميع المستشعرات جزءًا من التمثيل المركزي. يمكن فقط إضافة قراءة المستشعر إلى التمثيل المركزي ، والذي يتم تحديده على أنه موثوق للغاية. في الوقت نفسه ، ومع ذلك ، يمكن استخدام قيم أجهزة الاستشعار من قبل الروبوت. يمكن للطبقات الأخرى معالجة النتائج واستخدامها لتحقيق أهدافها ، بغض النظر عن كيفية التعامل مع الطبقات المختلفة.
متانة
من الواضح أن وجود أجهزة استشعار متعددة يضيف إلى قوة النظام عندما يمكن استخدام نتائجها بشكل معقول. هناك مصدر آخر من المتانة في بنية المحتوى الفرعي. تستمر الطبقات المنخفضة التي تم إثباتها جيدًا حتى إذا أضيفت طبقات أعلى. نظرًا لأن الطبقة الأعلى لا يمكنها إلا منع مخرجات الطبقة الدنيا من خلال التداخل الفعال مع البيانات البديلة ، وفي الحالات التي لا يمكن أن تؤدي إلى نتائج بطريقة مناسبة ، فإن المستويات الأقل ستحقق نتائج معقولة ، حتى عند مستوى أدنى من الكفاءة.
المدودية قابلى المد
إحدى الطرق الواضحة للتعامل مع قابلية التوسع هي السماح بتشغيل كل طبقة جديدة على معالجها الخاص.
الروبوتات
فيما يلي قائمة صغيرة من الروبوتات التي تستخدم بنية المحتوى الفرعي.
ألن (روبوت)
يستطيع هربرت ، وهو صودا ، أن يجمع الروبوت (انظر الروابط الخارجية للفيديو)
جنكيز ، هي عبارة عن مشاية رأس قوية (راجع الوصلات الخارجية للفيديو)
تم وصف ما سبق بالتفصيل مع روبوتات أخرى في لعبة Elephants Don’t Play Chess.
نقاط القوة والضعف
المزايا الرئيسية للعمارة هي:
التأكيد على التطوير التكراري واختبار أنظمة الوقت الحقيقي في مجالهم المستهدف ؛
التأكيد على ربط الإدراك المحدود والمخصص بشكل مباشر مع الإجراءات التي يتم التعبير عنها والتي تتطلبها ؛ و
التأكيد على التحكم التوزيعي والمتوازي ، وبالتالي دمج نظم الإدراك والتحكم والعمل بطريقة مماثلة للحيوانات.
العيوب الرئيسية للعمارة هي:
صعوبة تصميم اختيار العمل القابل للتكيف من خلال نظام التثبيط والقمع الموزع بشكل كبير ؛: 139-140 و
عدم وجود ذاكرة كبيرة وتمثيل رمزي ، والذي يبدو أنه يقيد البنية من فهم اللغة ؛
عندما تم تطوير البنية الفرعية ، سمح الإعداد الروتيني ونهج البناء الفرعي بنجاحه في العديد من المجالات الهامة التي فشلت فيها الذكاء الاصطناعي التقليدي ، أي التفاعل في الوقت الحقيقي مع بيئة ديناميكية. ومع ذلك ، فإن الافتقار إلى تخزين كبير للذاكرة ، والتمثيلات الرمزية ، والتحكم المركزي يضعها في وضع غير مواتٍ عند تعلم الإجراءات المعقدة ، ورسم الخرائط المتعمقة ، وفهم اللغة.
تمديد
في عام 1989 ، طورت بروكس بنية تحتية ، أساسا في مجال الحد من المدخلات وقمع المخرجات بواسطة الأوتومات المحدودة. في عام 1991 جاء بروكس مع تنفيذ النظام الهرموني. يجب منع أو تقييد الطبقات الفردية من خلال وجود أو عدم وجود هرمون. في عام 1992 ، ابتكر ماتاريك فكرة العمارة القائمة على السلوك. يجب أن تعالج هذه البنية الافتقار إلى التمثيل الصريح للعالم دون فقدان الصلابة والتفاعل.