Un sistema de control jerárquico es una forma de sistema de control en el que un conjunto de dispositivos y software de administración se organiza en un árbol jerárquico. Cuando los enlaces en el árbol son implementados por una red de computadoras, ese sistema de control jerárquico también es una forma de sistema de control en red.
Visión general
Un sistema construido por el hombre con un comportamiento complejo a menudo se organiza como una jerarquía. Por ejemplo, una jerarquía de comandos tiene entre sus características notables el organigrama de los superiores, subordinados y líneas de comunicación organizacional. Los sistemas de control jerárquico están organizados de manera similar para dividir la responsabilidad de la toma de decisiones.
Cada elemento de la jerarquía es un nodo vinculado en el árbol. Los comandos, las tareas y los objetivos que deben lograrse fluyen hacia abajo del árbol desde los nodos superiores a los nodos subordinados, mientras que las sensaciones y los resultados de los comandos fluyen hacia el árbol desde los nodos subordinados a los superiores. Los nodos también pueden intercambiar mensajes con sus hermanos. Las dos características distintivas de un sistema de control jerárquico están relacionadas con sus capas.
Cada capa superior del árbol opera con un intervalo más largo de planificación y tiempo de ejecución que su capa inmediatamente inferior.
Las capas inferiores tienen tareas, objetivos y sensaciones locales, y sus actividades están planificadas y coordinadas por capas superiores que generalmente no anulan sus decisiones. Las capas forman un sistema inteligente híbrido en el que las capas reactivas más bajas son sub-simbólicas. Las capas superiores, que tienen restricciones de tiempo relajadas, son capaces de razonar a partir de un modelo mundial abstracto y realizar una planificación. Una red de tareas jerárquica es un buen ajuste para la planificación en un sistema de control jerárquico.
Además de los sistemas artificiales, se propone que los sistemas de control de un animal se organicen como una jerarquía. En la teoría del control perceptivo, que postula que el comportamiento de un organismo es un medio para controlar sus percepciones, se sugiere que los sistemas de control del organismo estén organizados en un patrón jerárquico a medida que se construyen sus percepciones.
Estructura del sistema de control
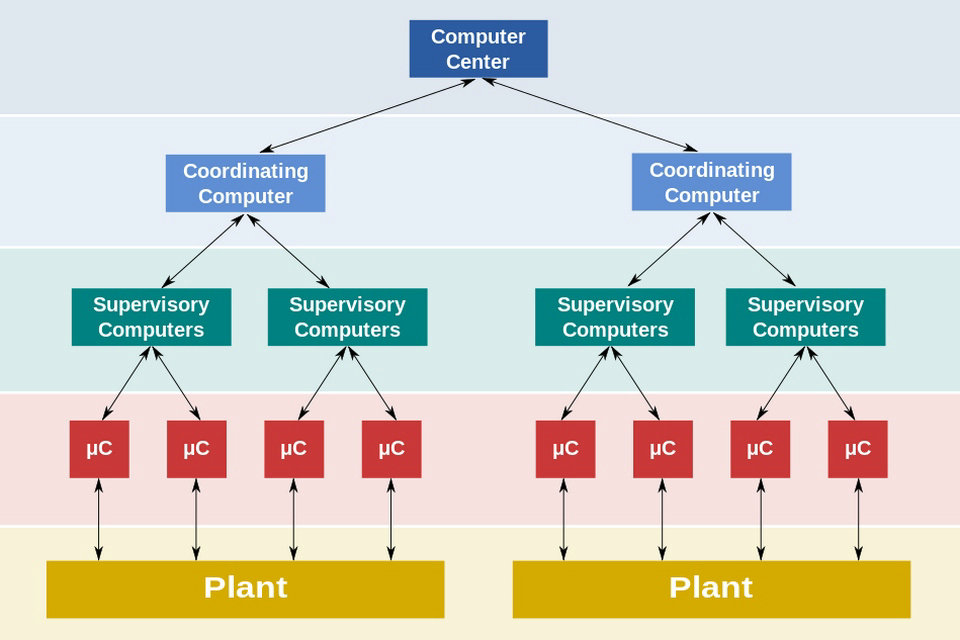
El diagrama adjunto es un modelo jerárquico general que muestra los niveles de fabricación funcional mediante el control computarizado de un sistema de control industrial.
Refiriéndose al diagrama;
El nivel 0 contiene los dispositivos de campo, como los sensores de flujo y temperatura, y los elementos de control finales, como las válvulas de control.
El nivel 1 contiene los módulos de entrada / salida (E / S) industrializados y sus procesadores electrónicos distribuidos asociados.
El nivel 2 contiene las computadoras de supervisión, que recopilan información de los nodos del procesador en el sistema y proporcionan las pantallas de control del operador.
El nivel 3 es el nivel de control de producción, que no controla directamente el proceso, pero se preocupa por el monitoreo de la producción y los objetivos de monitoreo
El nivel 4 es el nivel de programación de la producción.
Aplicaciones
Fabricación, robótica y vehículos.
Entre los paradigmas robóticos se encuentra el paradigma jerárquico en el que un robot opera de arriba hacia abajo, con una gran planificación, especialmente la planificación del movimiento. La ingeniería de producción asistida por computadora ha sido un foco de investigación en NIST desde la década de 1980. Su instalación de investigación de fabricación automatizada se utilizó para desarrollar un modelo de control de producción de cinco capas. A principios de la década de 1990, DARPA patrocinó la investigación para desarrollar sistemas de control inteligente distribuidos (es decir, en red) para aplicaciones tales como sistemas de comando y control militares. NIST se basó en investigaciones anteriores para desarrollar su Sistema de control en tiempo real (RCS) y el Sistema de control en tiempo real, un sistema de control jerárquico genérico que se ha utilizado para operar una célula de fabricación, una grúa robot y un vehículo automatizado.
En noviembre de 2007, DARPA realizó el Desafío Urbano. La participación ganadora, Tartan Racing empleó un sistema de control jerárquico, con planificación de misión en capas, planificación de movimiento, generación de comportamiento, percepción, modelado mundial y mecatrónica.
Inteligencia artificial
La arquitectura de subsunción es una metodología para desarrollar inteligencia artificial que está fuertemente asociada con la robótica basada en el comportamiento. Esta arquitectura es una forma de descomponer el comportamiento inteligente complicado en muchos módulos de comportamiento «simple», que a su vez están organizados en capas. Cada capa implementa un objetivo particular del agente de software (es decir, el sistema en su conjunto), y las capas superiores son cada vez más abstractas. El objetivo de cada capa subsume el de las capas subyacentes, por ejemplo, la decisión de avanzar por la capa de comer alimentos toma en cuenta la decisión de la capa más baja para evitar obstáculos. El comportamiento no necesita ser planeado por una capa superior, sino que los comportamientos pueden ser activados por entradas sensoriales y, por lo tanto, solo están activos en circunstancias en las que podrían ser apropiadas.
El aprendizaje de refuerzo se ha utilizado para adquirir un comportamiento en un sistema de control jerárquico en el que cada nodo puede aprender a mejorar su comportamiento con la experiencia.
James Albus, mientras estaba en NIST, desarrolló una teoría para el diseño de sistemas inteligentes llamada Arquitectura de Modelo de Referencia (RMA), que es un sistema de control jerárquico inspirado en RCS. Albus define cada nodo para contener estos componentes.
La generación de comportamiento es responsable de ejecutar las tareas recibidas desde el nodo superior superior. También planifica y emite tareas a los nodos subordinados.
La percepción sensorial es responsable de recibir las sensaciones de los nodos subordinados, luego agruparlas, filtrarlas y procesarlas en abstracciones de nivel superior que actualizan el estado local y que forman sensaciones que se envían al nodo superior.
El juicio de valor es responsable de evaluar la situación actualizada y evaluar planes alternativos.
World Model es el estado local que proporciona un modelo para el sistema controlado, el proceso controlado o el entorno en el nivel de abstracción de los nodos subordinados.
En sus niveles más bajos, la RMA se puede implementar como una arquitectura de subsunción, en la que el modelo mundial se asigna directamente al proceso controlado o al mundo real, evitando la necesidad de una abstracción matemática, y en el que se puede implementar una planificación reactiva limitada en el tiempo como una máquina de estados finitos. Sin embargo, los niveles más altos de RMA pueden tener sofisticados modelos matemáticos del mundo y comportamiento implementado mediante planificación y programación automatizadas. La planificación es necesaria cuando ciertos comportamientos no pueden ser activados por las sensaciones actuales, sino por las sensaciones pronosticadas o anticipadas, especialmente aquellas que surgen como resultado de las acciones del nodo.