Иерархическая система управления представляет собой форму системы управления, в которой набор устройств и управляющее программное обеспечение размещается в иерархическом дереве. Когда ссылки в дереве реализуются компьютерной сетью, тогда эта иерархическая система управления также является формой сетевой системы управления.
обзор
Человеческая система со сложным поведением часто организуется как иерархия. Например, иерархия команд имеет среди своих заметных особенностей организационную структуру начальников, подчиненных и линий организационной коммуникации. Иерархические системы управления организованы аналогично, чтобы разделить ответственность за принятие решений.
Каждый элемент иерархии является связанным узлом в дереве. Команды, задачи и цели, которые должны быть достигнуты, стекают по дереву от превосходных узлов к подчиненным узлам, тогда как ощущения и результаты команд выходят из дерева из подчиненных в высшие узлы. Узлы также могут обмениваться сообщениями со своими братьями и сестрами. Две отличительные черты иерархической системы управления связаны с ее слоями.
Каждый более высокий уровень дерева работает с более длинным интервалом планирования и времени выполнения, чем его нижний нижний уровень.
Нижние слои имеют локальные задачи, цели и ощущения, а их действия планируются и координируются более высокими уровнями, которые обычно не переопределяют их решения. Слои образуют гибридную интеллектуальную систему, в которой самые низкие, реактивные слои являются субсимволическими. Более высокие уровни, имеющие расслабленные временные ограничения, способны рассуждать из абстрактной мировой модели и выполнять планирование. Иерархическая сеть задач хорошо подходит для планирования в иерархической системе управления.
Помимо искусственных систем, системы управления животным предлагаются как иерархия. В теории перцептивного управления, которая постулирует, что поведение организма является средством контроля его восприятия, системы управления организмом предлагается организовывать по иерархической схеме, так как их восприятие построено так.
Структура системы управления
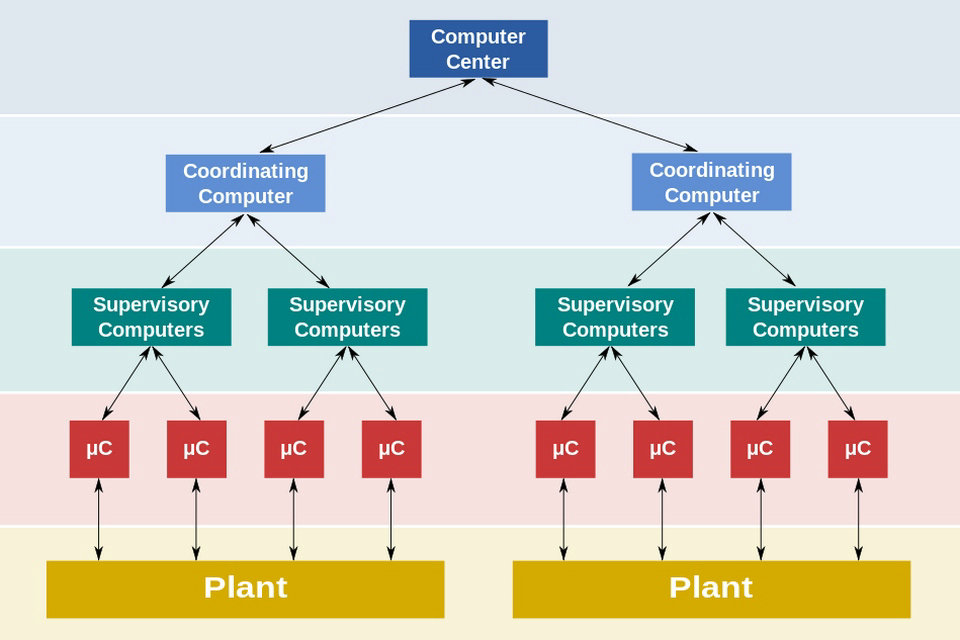
Сопроводительная диаграмма представляет собой общую иерархическую модель, которая показывает функциональные уровни производства с использованием компьютеризированного управления промышленной системой управления.
Ссылаясь на диаграмму;
Уровень 0 содержит полевые устройства, такие как датчики расхода и температуры, и конечные элементы управления, такие как регулирующие клапаны
Уровень 1 содержит промышленные модули ввода / вывода (I / O) и связанные с ними распределенные электронные процессоры.
Уровень 2 содержит контрольные компьютеры, которые собирают информацию с узлов процессора в системе и предоставляют экраны управления оператора.
Уровень 3 — это уровень контроля производства, который непосредственно не контролирует этот процесс, а занимается мониторингом целей производства и мониторинга
Уровень 4 — это уровень планирования производства.
Приложения
Производство, робототехника и транспортные средства
Среди роботизированных парадигм — иерархическая парадигма, в которой робот работает сверху вниз, тяжелый для планирования, особенно планирования движения. Автоматизированная технология производства была ориентирована на исследования NIST с 1980-х годов. Его автоматизированный научно-исследовательский институт был использован для разработки пятислойной модели управления производством. В начале 1990-х годов DARPA спонсировала исследования для разработки распределенных (то есть сетевых) интеллектуальных систем управления для таких приложений, как системы военного управления. NIST, основанный на более ранних исследованиях для разработки своей системы управления в реальном времени (RCS) и программного обеспечения системы управления в реальном времени, которая является общей иерархической системой управления, которая используется для управления производственной ячейкой, роботом-краном и автоматическим транспортным средством.
В ноябре 2007 года DARPA провела Urban Challenge. В выигрышной записи «Тартан Гонс» использовала иерархическую систему управления, включающую многоплановое планирование миссии, планирование движения, формирование поведения, восприятие, мировое моделирование и мехатронику.
Искусственный интеллект
Архитектура Subsumption — это методология разработки искусственного интеллекта, которая в значительной степени связана с робототехникой, основанной на поведении. Эта архитектура является способом разложения сложного интеллектуального поведения во множество «простых» модулей поведения, которые, в свою очередь, организованы в слои. Каждый уровень реализует конкретную цель программного агента (т.е. системы в целом), а более высокие уровни становятся все более абстрактными. Цель каждого слоя заключается в том, что из нижележащих слоев, например, решение двигаться вперед по питающемуся слою учитывает решение самого низкого уровня предотвращения препятствий. Поведение не обязательно должно планироваться с помощью превосходного уровня, а поведение может быть вызвано сенсорными входами и поэтому активны только в тех случаях, когда они могут быть подходящими.
Усиление обучения использовалось для получения поведения в иерархической системе управления, в которой каждый узел может научиться улучшать свое поведение с опытом.
Джеймс Альбус, в то время как в NIST, разработал теорию интеллектуального проектирования систем, названную Reference Model Architecture (RMA), которая представляет собой иерархическую систему управления, вдохновленную RCS. Albus определяет каждый узел, содержащий эти компоненты.
Генерация поведения отвечает за выполнение задач, полученных от главного родительского узла. Он также планирует и выполняет задачи подчиненных узлов.
Сенсорное восприятие отвечает за получение ощущений от подчиненных узлов, затем группировку, фильтрацию и, в противном случае, обработку их на абстракции более высокого уровня, которые обновляют локальное состояние и формируют ощущения, которые отправляются в верхний узел.
Оценка стоимости несет ответственность за оценку обновленной ситуации и оценку альтернативных планов.
Модель мира — это локальное состояние, которое обеспечивает модель контролируемой системы, контролируемого процесса или среды на уровне абстракции подчиненных узлов.
На своих самых низких уровнях RMA может быть реализована как архитектура subsumption, в которой мировая модель отображается непосредственно на контролируемый процесс или реальный мир, избегая необходимости в математической абстракции и в которой может быть реализовано временное реактивное планирование как конечный автомат. Однако более высокие уровни RMA могут иметь сложные математические модели мира и поведение, реализованные автоматизированным планированием и планированием. Планирование требуется, когда определенные действия не могут быть вызваны текущими ощущениями, а скорее прогнозируемыми или ожидаемыми ощущениями, особенно теми, которые возникают в результате действий узла.