Un système de contrôle hiérarchique est une forme de système de contrôle dans lequel un ensemble de dispositifs et de logiciels de gestion est organisé dans une arborescence hiérarchique. Lorsque les liens de l’arborescence sont mis en oeuvre par un réseau informatique, ce système de contrôle hiérarchique est également une forme de système de contrôle en réseau.
Vue d’ensemble
Un système construit par l’homme avec un comportement complexe est souvent organisé comme une hiérarchie. Par exemple, une hiérarchie de commandes comporte, entre autres caractéristiques, l’organigramme des supérieurs, des subordonnés et des lignes de communication organisationnelles. Les systèmes de contrôle hiérarchiques sont organisés de la même manière pour diviser la responsabilité de la prise de décision.
Chaque élément de la hiérarchie est un nœud lié dans l’arbre. Les commandes, tâches et objectifs à atteindre descendent de l’arborescence des nœuds supérieurs aux nœuds subordonnés, tandis que les sensations et les résultats des commandes remontent de l’arborescence des nœuds supérieurs aux subordonnés. Les nœuds peuvent également échanger des messages avec leurs frères et soeurs. Les deux caractéristiques distinctives d’un système de contrôle hiérarchique sont liées à ses couches.
Chaque couche supérieure de l’arbre fonctionne avec un intervalle plus long en termes de planification et d’exécution que sa couche immédiatement inférieure.
Les couches inférieures ont des tâches, des objectifs et des sensations locales, et leurs activités sont planifiées et coordonnées par des couches supérieures qui n’annulent généralement pas leurs décisions. Les couches forment un système intelligent hybride dans lequel les couches réactives les plus basses sont sous-symboliques. Les couches supérieures, ayant des contraintes de temps assouplies, sont capables de raisonner à partir d’un modèle de monde abstrait et d’effectuer une planification. Un réseau de tâches hiérarchique convient parfaitement à la planification dans un système de contrôle hiérarchique.
Outre les systèmes artificiels, il est proposé que les systèmes de contrôle d’un animal soient organisés en hiérarchie. Dans la théorie du contrôle perceptuel, qui postule que le comportement d’un organisme est un moyen de contrôler ses perceptions, il est suggéré que les systèmes de contrôle de l’organisme soient organisés selon un schéma hiérarchique à mesure que leurs perceptions sont construites.
Structure du système de contrôle
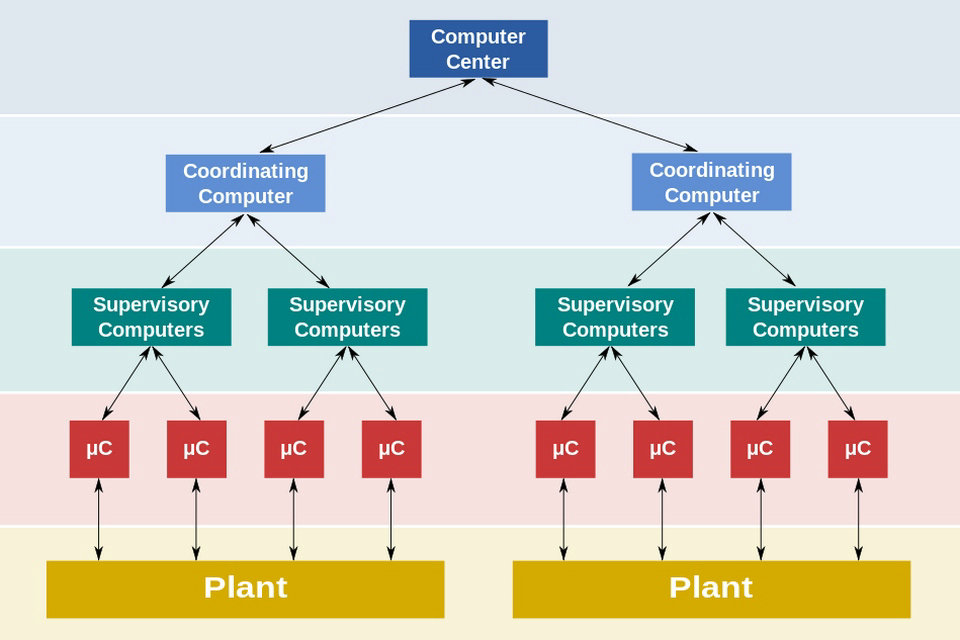
Le schéma ci-joint est un modèle hiérarchique général montrant les niveaux de fabrication fonctionnels à l’aide du contrôle informatisé d’un système de contrôle industriel.
En se référant au schéma;
Le niveau 0 contient les appareils de terrain, tels que les capteurs de débit et de température, et les éléments de contrôle finaux, tels que les vannes de contrôle.
Le niveau 1 contient les modules d’entrée / sortie (E / S) industrialisés et leurs processeurs électroniques distribués associés.
Le niveau 2 contient les ordinateurs de supervision, qui rassemblent les informations provenant des nœuds de processeur du système et fournissent les écrans de contrôle de l’opérateur.
Le niveau 3 correspond au niveau de contrôle de la production, qui ne contrôle pas directement le processus, mais concerne la surveillance des objectifs de production et de surveillance.
Le niveau 4 correspond au niveau de planification de la production.
Applications
Fabrication, robotique et véhicules
Parmi les paradigmes robotiques, on trouve le paradigme hiérarchique selon lequel un robot fonctionne de manière descendante, avec une planification lourde, en particulier la planification de mouvements. L’ingénierie de la production assistée par ordinateur est au cœur des recherches du NIST depuis les années 1980. Son centre de recherche sur la fabrication automatisée a été utilisé pour développer un modèle de contrôle de la production à cinq couches. Au début des années 90, la DARPA a sponsorisé des recherches pour développer des systèmes de contrôle intelligents distribués (en réseau) pour des applications telles que les systèmes de commandement et de contrôle militaires. Le NIST s’est appuyé sur des recherches antérieures pour développer son système de contrôle en temps réel (RCS) et son logiciel de contrôle en temps réel, qui est un système de contrôle hiérarchique générique utilisé pour faire fonctionner une cellule de fabrication, un pont roulant robotique et un véhicule automatisé.
En novembre 2007, la DARPA a organisé le Urban Challenge. Le lauréat, Tartan Racing, utilisait un système de contrôle hiérarchique, avec une planification de mission en couches, une planification de mouvements, la génération de comportements, la perception, la modélisation du monde et la mécatronique.
Intelligence artificielle
L’architecture de subsomption est une méthodologie de développement de l’intelligence artificielle fortement associée à la robotique comportementale. Cette architecture permet de décomposer un comportement intelligent complexe en plusieurs modules de comportement «simples», eux-mêmes organisés en couches. Chaque couche implémente un objectif particulier de l’agent logiciel (le système dans son ensemble), et les couches supérieures sont de plus en plus abstraites. Le but de chaque couche englobe celui des couches sous-jacentes, par exemple, la décision d’aller de l’avant avec la couche nourriture-repas prend en compte la décision de la couche la plus basse pour éviter les obstacles. Les comportements ne doivent pas nécessairement être planifiés par une couche supérieure; ils peuvent plutôt être déclenchés par des entrées sensorielles et ne sont donc actifs que dans des circonstances où ils pourraient convenir.
L’apprentissage par renforcement a été utilisé pour acquérir un comportement dans un système de contrôle hiérarchique dans lequel chaque nœud peut apprendre à améliorer son comportement avec l’expérience.
James Albus, alors qu’il travaillait au NIST, a développé une théorie pour la conception de système intelligent appelée Architecture de modèle de référence (RMA), qui est un système de contrôle hiérarchique inspiré de RCS. Albus définit chaque nœud pour contenir ces composants.
La génération de comportement est responsable de l’exécution des tâches reçues du nœud supérieur, parent. Il planifie et attribue également des tâches aux nœuds subordonnés.
La perception sensorielle est chargée de recevoir les sensations des nœuds subordonnés, de les regrouper, de les filtrer et de les transformer en abstractions de niveau supérieur mettant à jour l’état local et formant des sensations envoyées au nœud supérieur.
Le jugement de valeur est responsable de l’évaluation de la situation actualisée et des plans alternatifs.
Modèle mondial est l’état local qui fournit un modèle pour le système contrôlé, le processus contrôlé ou l’environnement au niveau d’abstraction des nœuds subordonnés.
Au niveau le plus bas, la RMA peut être mise en œuvre en tant qu’architecture de sous-consommation, dans laquelle le modèle mondial est directement mappé sur le processus contrôlé ou dans le monde réel, évitant ainsi le besoin d’une abstraction mathématique et dans lequel une planification réactive limitée dans le temps comme une machine à états finis. Toutefois, les niveaux les plus élevés de la RMA peuvent comporter des modèles et des comportements mathématiques sophistiqués du monde mis en œuvre par la planification et la planification automatisées. La planification est nécessaire lorsque certains comportements ne peuvent pas être déclenchés par les sensations actuelles, mais plutôt par les sensations prédites ou anticipées, notamment celles résultant des actions du nœud.