分层控制系统(Hierarchical control system)是一种控制系统形式,其中一组设备和管理软件被安排在分层树中。当树中的链接由计算机网络实现时,该分层控制系统也是网络控制系统的一种形式。
概观
具有复杂行为的人工构建系统通常被组织为层次结构。例如,命令层次结构在其显着特征中具有上级,下属和组织通信线的组织图。分层控制系统的组织方式类似于划分决策责任。
层次结构的每个元素都是树中的链接节点。要实现的命令,任务和目标在树上从上级节点流向下级节点,而感知和命令结果从树上流向上级节点。节点也可以与兄弟姐妹交换消息。分层控制系统的两个显着特征与其层相关。
树的每个较高层以比其紧邻的较低层更长的规划和执行时间间隔操作。
较低层具有本地任务,目标和感觉,并且它们的活动由较高层计划和协调,这些层通常不会覆盖其决策。这些层形成混合智能系统,其中最低的反应层是次符号的。具有放松时间限制的较高层能够从抽象世界模型推导并执行规划。分层任务网络非常适合在分层控制系统中进行规划。
除了人工系统之外,还建议将动物的控制系统组织为层次结构。在感知控制理论中,假定有机体的行为是控制其感知的一种手段,有机体的控制系统被建议按照等级模式进行组织,因为它们的感知是如此构建的。
控制系统结构
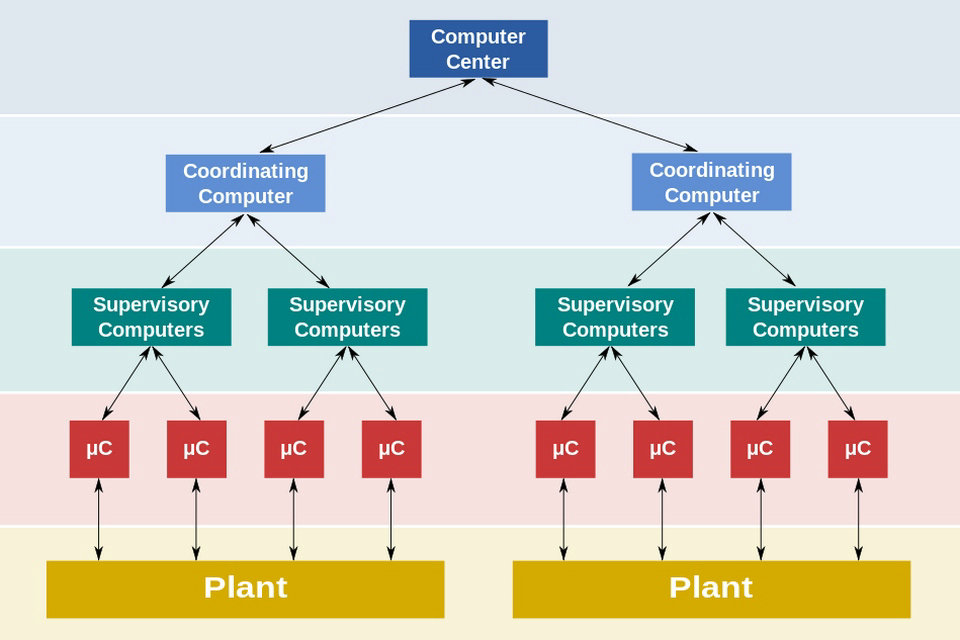
附图是一般分层模型,其显示了使用工业控制系统的计算机控制的功能制造水平。
参考图;
0级包含现场设备,如流量和温度传感器,以及最终控制元件,如控制阀
1级包含工业化输入/输出(I / O)模块及其相关的分布式电子处理器。
级别2包含监控计算机,它从系统上的处理器节点整理信息,并提供操作员控制屏幕。
3级是生产控制级别,不直接控制过程,但涉及监控生产和监控目标
4级是生产调度级别。
应用
制造业,机器人和车辆
在机器人范例中,机器人范式是机器人以自上而下的方式运作,重点是规划,特别是运动规划。自20世纪80年代以来,计算机辅助生产工程一直是NIST的研究热点。其自动化制造研究设施用于开发五层生产控制模型。在20世纪90年代早期,DARPA赞助了研究,为军事指挥和控制系统等应用开发分布式(即网络化)智能控制系统。NIST以早期研究为基础,开发了实时控制系统(RCS)和实时控制系统软件,这是一种通用的分层控制系统,用于操作制造单元,机器人起重机和自动驾驶汽车。
2007年11月,DARPA举办了城市挑战赛。获奖作品Tartan Racing采用分级控制系统,具有分层任务规划,运动规划,行为生成,感知,世界建模和机电一体化。
人工智能
包容体系结构是一种开发与基于行为的机器人技术密切相关的人工智能的方法。这种体系结构是将复杂的智能行为分解为许多“简单”行为模块的一种方式,这些模块又被组织成层。每个层实现软件代理的特定目标(即整个系统),更高层越来越抽象。每个层的目标都包含底层的目标,例如,通过吃 – 食物层向前推进的决定考虑了最低障碍物避免层的决定。行为不需要由优质层计划,而行为可能由感官输入触发,因此仅在它们可能适合的情况下才有效。
强化学习已被用于获取分层控制系统中的行为,其中每个节点可以学习通过经验改进其行为。
James Nbus在NIST期间开发了一种名为参考模型架构(RMA)的智能系统设计理论,这是一种受RCS启发的分层控制系统。Albus定义每个节点包含这些组件。
行为生成负责执行从上级父节点接收的任务。它还计划从属节点并向其发布任务。
感知感知负责接收来自下级节点的感觉,然后将它们分组,过滤和以其他方式处理成更高级抽象,其更新本地状态并且形成发送到上级节点的感觉。
价值判断负责评估更新的情况并评估替代计划。
World Model是本地状态,它为下级节点的抽象级别的受控系统,受控过程或环境提供模型。
在最低级别,RMA可以实现为包含体系结构,其中世界模型直接映射到受控过程或现实世界,避免了对数学抽象的需要,并且可以实现时间受限的反应式规划作为有限状态机。然而,更高级别的RMA可能具有通过自动规划和调度实现的复杂的数学世界模型和行为。当某些行为不能被当前感觉触发时,需要进行规划,而不是通过预测或预期的感觉触发,特别是那些由于节点的动作而产生的感觉。