입자의 위치는 좌표 프레임의 원점에서 입자까지의 좌표 벡터로 정의됩니다.
비 회전 프레임에서 입자 궤적의 운동학
가장 일반적인 경우에는 3 차원 좌표계를 사용하여 입자의 위치를 정의합니다. 그러나 입자가 표면에서 움직이기 위해 구속되면 2 차원 좌표계로도 충분합니다. 물리학의 모든 관찰은 기준 프레임과 관련하여 관찰이 기술되지 않으면 불완전합니다.
입자의 위치 벡터는 참조 프레임의 원점에서 입자로 그려지는 벡터입니다. 원점에서 점까지의 거리와 원점에서 방향을 표현합니다. 3 차원에서 점 P의 위치는 다음과 같이 표현 될 수있다.

어디에 











위치 벡터의 방향 코사인은 방향의 양적 측정을 제공합니다. 입자의 위치 벡터는 고유하지 않다는 점에 유의해야합니다. 주어진 입자의 위치 벡터는 서로 다른 기준 프레임에 따라 다릅니다.
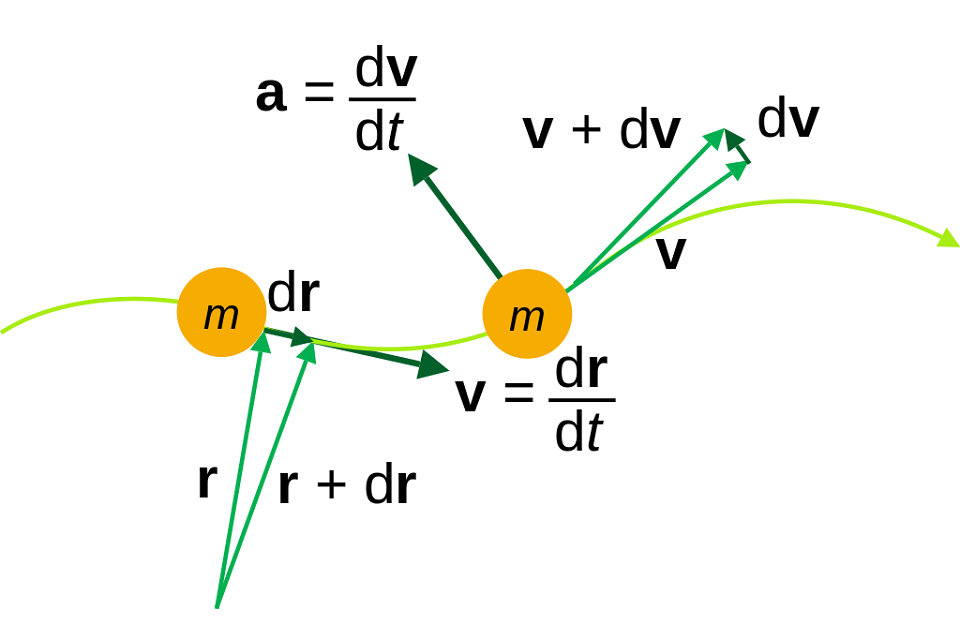
입자의 궤적은 시간의 벡터 함수이며, 
여기서 좌표 x P , y P 및 z P 는 각각 시간의 함수입니다.

속도와 속도
파티클의 속도는 모션의 방향과 파티클의 모션의 크기를 나타내는 벡터 양입니다. 더 수학적으로, 시간에 대한 점의 위치 벡터의 변화율은 점의 속도입니다. 입자의 두 위치의 차이를 시간 간격으로 나눈 비율을 고려하십시오. 이 비율을 해당 시간 간격의 평균 속도라고하며 Velocity = 이동 / 소요 시간으로 정의됩니다

여기서 ΔP는 시간 간격 Δt에 대한 위치 벡터의 변화입니다.
제한 시간에서 Δt가 작아지면서 평균 속도는 위치 벡터의 시간 도함수가되고,

물체의 속도는 | V | 그 속도의. 스칼라 수량입니다.

여기서 s는 입자의 궤적을 따라 측정 된 원호 길이이다. 시간이 지남에 따라 입자가 이동하는이 원호 길이는 감소하지 않는 양입니다. 따라서 ds / dt는 음수가 아니므로 속도가 음수가 아님을 의미합니다.
가속
속도 벡터는 크기와 방향 또는 한 번에 모두 변화 할 수 있습니다. 따라서 가속도는 속도 벡터의 크기 변화율에 벡터의 방향 변화율을 더한 값입니다. 속도를 정의하는 입자의 위치와 관련하여 사용 된 것과 같은 추론을 가속도를 정의하는 속도에 적용 할 수 있습니다. 입자의 가속도는 속도 벡터의 변화율로 정의되는 벡터입니다. 시간 간격에 걸친 입자의 평균 가속도는 비율로 정의됩니다.

여기서 ΔV는 속도 벡터의 차이이고 Δt는 시간 간격입니다.
입자의 가속도는 시간 간격이 제로에 가까워짐에 따라 평균 가속도의 한계이며, 이는 시간 도함수이고,
또는


물체의 가속도의 크기는 | A | 그 가속 벡터의. 스칼라 수량입니다.

상대 위치 벡터

이는 위치 벡터의 구성 요소 사이의 차이입니다.

점 B에 위치 구성 요소가있는 경우

점 B에 대한 점 A의 위치는 그 구성 요소 간의 차이입니다.

상대 속도
다른 점에 대한 한 점의 속도는 단순히 속도 간의 차이입니다

이는 속도의 구성 요소 사이의 차이입니다.
점 A에 속도 성분이있는 경우
점 B는 속도 성분


점 B에 대한 점 A의 속도는 그 구성 요소들 사이의 차이입니다 :
대안으로,이 동일한 결과는 상대 위치 벡터 R B / A 의 시간 도함수를 계산하여 얻을 수 있습니다.

속도가 광속 c (일반적으로 95 % 이내)에 근접한 경우, V와 c의 비율에 의존하는 신속성이라는 또 다른 계획이 특수 상대성도에서 사용됩니다.
상대 가속도
다른 점 B에 대한 한 점 C의 가속은 단순한 가속의 차이입니다.

이는 가속도의 구성 요소 간의 차이입니다.
C 점에 가속도 성분이 있으면
점 B에는 가속 성분이있다.


점 B에 대한 점 C의 가속은 그 성분 사이의 차이입니다 :
대안으로,이 동일한 결과는 상대 위치 벡터 P B / A 의 두 번째 시간 도함수를 계산하여 얻을 수 있습니다.

일정한 가속도의 입자 궤도
일정한 가속의 경우, 점 P의 가속도 벡터 A가 크기와 방향이 일정하므로 미분 방정식 1)을 적분 할 수 있습니다. 이러한 점은 균일하게 가속 된 운동을 수행한다고합니다 . 이 경우 가속도 방정식 A를 시간에 적분하여 입자의 속도 V (t)와 궤도 P (t)를 구할 수있다.
위치의 초기 조건, 



두 번째 통합은 경로 (궤도)를 산출하고,

변위, 속도, 가속도 및 시간 간의 추가적인 관계가 도출 될 수있다. 가속도가 일정하기 때문에, 

명시된 시간 의존성이없는 속도, 위치 및 가속도 간의 관계는 시간에 대한 평균 가속을 해결하고 대체 및 단순화함으로써 얻을 수 있습니다


여기서 ∘는 내적 (dot product)을 나타내며, 벡터가 아닌 스칼라 인 제품이므로 적합하다.

도트는 각도의 코사인으로 대체 할 수 있습니다. 

항상 운동 방향의 가속의 경우 벡터 사이 각도 ( 

이것은 벡터의 크기에 대한 표기법을 사용하여 단순화 할 수 있습니다. 

이렇게하면 입자의 파라 메트릭 방정식이 속도 대 위치의 직교 관계로 감소합니다. 이 관계는 시간이 알려지지 않은 경우 유용합니다. 우리는 또한 
















원통형 – 극 좌표계의 입자 궤도
X-Y 평면에서 극좌표를 사용하여 입자 P (t) = (X (t), Y (t) 및 Z (t))의 궤적을 공식화하는 것이 종종 편리합니다. 이 경우 속도와 가속도는 편리한 형식을 취합니다.
파티클 P의 궤도는 고정 된 기준 프레임 F에서 측정 된 좌표 벡터 P에 의해 정의됩니다. 파티클이 움직일 때, 좌표 벡터 P (t)는 궤적을 따라 움직입니다.

여기서 i, j 및 k는 각각 기준 프레임 F의 X, Y 및 Z 축을 따른 단위 벡터이다.
원형 실린더의 표면에서만 움직이는 입자 P를 생각해 보자. 고정 된 프레임 F의 Z 축을 실린더의 축과 정렬하는 것이 가능하다. 그러면 X-Y 평면에서이 축을 중심으로 한 각도 θ를 사용하여 궤도를 다음과 같이 정의 할 수 있습니다.

P (t)에 대한 원통 좌표는 반경 및 접선 단위 벡터를 도입함으로써 단순화 될 수 있으며,

초등 수학에서 시간 파생어 :




이 표기법을 사용하여, P (t)는 형태를 취하고,

여기서 R은 반경 R의 원통 표면에서만 움직이는 입자의 경우 일정합니다.
일반적으로, 궤적 P (t)는 원형 실린더 상에 놓 이도록 제한되지 않으므로, 반경 R은 시간에 따라 변하고 원통형 – 극 좌표에서 입자의 궤적은 다음과 같이된다 :

R, 세타 및 Z는 시간의 연속적으로 분화 가능한 함수가 될 수 있으며 단순화를 위해 함수 표기법이 생략되었습니다. 속도 벡터 V P 는 궤도 P (t)의 시간 도함수이며, 
유사하게, 속도 V P 의 시간 도함수 인 가속도 P P 는 다음과 같이 주어진다.

용어 

일정한 반지름
입자의 궤적이 원통에 놓 이도록 제한되면 반경 R은 일정하고 속도 및 가속도 벡터는 단순화됩니다. VP 의 속도는 궤도 P (t)의 시간 도함수이고,
가속도 벡터는 다음과 같습니다.


평면 원형 궤도
원통형 실린더의 입자 궤적의 특별한 경우는 Z 축을 따라 이동이 없을 때 발생합니다.

여기서 R과 Z 0 은 상수입니다. 이 경우 속도 V P 는 다음과 같이 주어진다.

어디에

는 실린더의 z 축 주위의 단위 벡터 eθ 의 각속도이다.
입자 P의 가속도 P P 는 다음과 같이 주어진다.
구성 요소


가속도의 반지름 및 접선 구성 요소라고 각각 지칭됩니다.
각속도 및 각가 속력에 대한 표기법은 다음과 같이 정의됩니다.

따라서 원형 궤적에 대한 반경 방향 및 접선 방향 가속도 성분은 다음과 같이 쓰여집니다.

비행기에서 움직이는 시체의 궤도를 가리 킵니다.
행렬 표현
평면 R2에서의 회전과 병진의 조합은 동질 변환으로 알려진 특정 유형의 3×3 행렬로 나타낼 수 있습니다. 3×3 동차 변환은 다음과 같이 2×2 회전 행렬 A (φ)와 2×1 병진 벡터 d = ( dx , dy )로 구성됩니다.

이러한 균질 변환은 평면 z = 1의 점, 즉 좌표가 p = (x, y, 1) 인 점에서 강체 변형을 수행합니다.
특히, p가 고정 된 프레임 F와 일치하는 참조 프레임 M의 점들의 좌표를 정의한다고 가정하자. 그러면 M의 원점이 F의 원점을 기준으로 이동 벡터 d만큼 변위되고 F의 x 축은 M에있는 점의 F에서 새로운 좌표는으로 주어진다 :

동종 변환은 아핀 변환을 나타냅니다. 이 공식은 번역이 R2의 선형 변환이 아니기 때문에 필요합니다.그러나 투영 기하학을 사용하여 R 2 가 R 3 의 하위 집합으로 간주되도록 변환은 어파 인 선형 변환이됩니다.
순수한 번역
강체가 이동하여 참조 프레임 M이 고정 된 프레임 F에 대해 회전하지 않으면 (∅ = 0),이 동작을 순수 변환이라고합니다. 이 경우, 몸체의 모든 점의 궤도는 M의 원점 궤도 d (t)의 오프셋입니다. 즉,

따라서 순수한 몸체에서, 몸체의 모든 점 P의 속도와 가속도는 다음과 같이 주어진다.

여기서 도트는 시간에 대한 도함수를 나타내고 V O 및 A O 는 각각 이동 프레임 M의 원점의 속도 및 가속도이다. M에서의 좌표 벡터 p는 상수이기 때문에 그 미분은 0이다.
고정 된 축을 중심으로 한 몸체 회전
회전 또는 각도 운동은 객체의 회전에 대한 설명입니다. 회전에 대한 설명에는 방향을 설명하는 몇 가지 방법이 필요합니다. 일반적인 설명에는 오일러 각과 대수 곱에 의해 유도 된 회전의 기구학이 포함됩니다.
다음에서는 고정 된 방향의 축에 대한 간단한 회전에만주의를 기울입니다. 편의를 위해 z 축을 선택했습니다.
위치
이는이 공유 된 z 축을 중심으로 고정 된 F에 대한 평면 기준 프레임 (M)의 각도 위치로서 회전의 설명을 허용한다. M의 좌표 p = (x, y)는 행렬 방정식에 의해 F의 좌표 P = (X, Y)와 관련됩니다.

어디에

는 F에 대한 M의 각 위치를 시간의 함수로 정의하는 회전 행렬입니다.
속도
점 P가 M에서 움직이지 않으면 F의 속도는 다음과 같이 주어진다.

좌표 p를 제거하고 이것을 궤적 P (t)에 대한 연산으로 쓰면 편리합니다.

여기서 행렬

F에 대한 M의 각속도 행렬로 알려져있다. 매개 변수 ω는 각도 θ의 시간 도함수, 즉 :

가속
F에서 P (t)의 가속도는 속도의 시간 미분으로 얻어지며,

어느 것이

어디에

는 F상의 M의 각가 속력 행렬이고,

회전에 대한 설명은 다음 세 가지 양과 관련됩니다.
각도 위치 : 회전 축에서 선택한 원점에서 대상 점까지의 거리는 점을 찾는 벡터 r (t)입니다. 벡터 r (t)는 회전축에 수직 인 평면에서 약간의 투영 (또는 이와 동등한 구성 요소) r ⊥ (t)를 갖는다. 그러면 그 점의 각 위치는 (일반적으로 오른쪽 룰에 의해 주어진) 알려진 회전 감각에서 기준 축 (일반적으로 양의 x 축)에서 벡터 r ⊥ (t)까지의 각도 θ입니다.
각속도 : 각속도 ω는 각 위치 θ가 시간 t에 대해 변하는 비율이다.

각속도는 그림 1에서 크기 ω로 회전축을 따라 지시하는 벡터 Ω와 오른손 법칙에 의해 주어진 회전 방향에 의해 결정되는 감각으로 표현된다.
각 가속도 : 각 가속도 α의 크기는 각속도 ω가 시간 t에 대해 변하는 비율입니다.

병진 운동학 방정식은 간단한 변수 교환으로 일정한 각 가속도를위한 평면 회전 운동학으로 쉽게 확장 될 수 있습니다.




여기서 θ i 와 θ f 는 각각 초기 및 최종 각 위치이고, ω i 와 ω f 는 각각 초기 및 최종 각속도이고, α는 일정한 각가속도이다. 공간에서의 위치와 공간에서의 속도는 둘 다 (회전 하에서의 특성에 따라) 참 벡터이지만, 각속도와 마찬가지로 각도 자체는 참 벡터가 아닙니다.
3 차원에서 움직이는 신체의 궤적을 가리킨다.
운동학의 중요한 공식은 3 차원 공간에서 궤도를 따라갈 때 움직이는 물체에서 점의 속도와 가속도를 정의합니다. 이것은 뉴턴의 제 2 법칙 또는 라그랑주의 방정식을 사용하여 운동 방정식을 유도하는 데 사용되는 신체 질량 중심에 특히 중요합니다.
위치
이 공식을 정의하기 위해 기계 시스템의 구성 요소 B의 이동은 균질 변환 [T (t)] = [A (t)]로 조립 된 회전 집합 [A (t)] 및 병진 d (t), d (t)]를 생성한다. p가 이동 참조 프레임 M에서 측정 된 B의 점 P의 좌표 인 경우 F에서 추적 된이 점의 궤적은 다음과 같이 표시됩니다.

이 표기법은 P = (X, Y, Z, 1)과 P = (X, Y, Z)를 구별하지 않습니다.
P의 궤적에 대한이 등식은 M의 좌표 벡터 p를 다음과 같이 계산하기 위해 반전 될 수 있습니다.

이 표현식은 회전 행렬의 전치 (transpose)가 역 (inverse)이라는 사실을 사용합니다.

속도
궤적 P (t)를 따른 점 P의 속도는이 위치 벡터의 시간 도함수로서 얻어지며,

점은 시간에 대한 도함수를 나타냅니다. p는 상수이므로 그 미분은 0입니다.
이 공식은 고정 된 프레임 F에서 측정 된 궤도 P (t)에서 작동하여 P의 속도를 얻도록 수정 될 수 있습니다. p에 대한 역변환을 속도 방정식에 대입하면 다음을 얻을 수 있습니다.

행렬 [S]는 다음과 같이 주어진다.

어디에
는 각속도 행렬이다.

연산자 [S]를 곱하면 속도 V P 의 공식은 다음과 같은 형식을 취합니다.

여기서 벡터 ω는 행렬 [Ω]의 성분으로부터 얻은 각속도 벡터이다. 벡터

이동 프레임 (M)의 원점 (O)에 대한 P의 위치; 과

원점 O의 속도입니다.
가속
이동체 B에서의 점 P의 가속도는 속도 벡터의 시간 미분으로 구해진다.

이 등식은 먼저 계산하여 확장 할 수 있습니다.

과

가속도 A P 의 공식은 이제 다음과 같이 구할 수 있습니다.
또는


여기서, α는 각속도 행렬의 미분으로부터 얻어진 각 가속도 벡터이다.
상대 위치 벡터 (이동 프레임 (M)의 원점 (O)에 대한 P의 위치); 과

은 이동 프레임 (M)의 원점의 가속도이다.