Particle Kinematics एक कण के प्रक्षेपवक्र का अध्ययन है। एक कण की स्थिति को समन्वय फ्रेम की उत्पत्ति से कण को समन्वय वेक्टर के रूप में परिभाषित किया जाता है।
एक गैर घूर्णन फ्रेम संदर्भ में एक कण प्रक्षेपवक्र की छायांकन
सबसे सामान्य मामले में, एक कण की स्थिति को परिभाषित करने के लिए एक त्रि-आयामी समन्वय प्रणाली का उपयोग किया जाता है। हालांकि, अगर कण को सतह में स्थानांतरित करने के लिए बाध्य किया जाता है, तो एक द्वि-आयामी समन्वय प्रणाली पर्याप्त है। संदर्भ फ्रेम के संबंध में वर्णित उन अवलोकनों के बिना भौतिकी में सभी अवलोकन अधूरे हैं।
एक कण की स्थिति वेक्टर संदर्भ फ्रेम की उत्पत्ति से कण तक खींचा गया वेक्टर होता है। यह उत्पत्ति से बिंदु की दूरी और उत्पत्ति से इसकी दिशा दोनों को व्यक्त करता है। तीन आयामों में, बिंदु पी की स्थिति को व्यक्त किया जा सकता है

कहा पे 











स्थिति वेक्टर की दिशा कोसाइन दिशा की मात्रात्मक माप प्रदान करते हैं। यह ध्यान रखना महत्वपूर्ण है कि एक कण की स्थिति वेक्टर अद्वितीय नहीं है। किसी दिए गए कण की स्थिति वेक्टर संदर्भ के विभिन्न फ्रेम के सापेक्ष अलग है।
एक कण का प्रक्षेपण समय का एक वेक्टर कार्य है, 
जहां समन्वय x पी , वाई पी , और जेड पी समय के प्रत्येक कार्य होते हैं।

वेग और गति
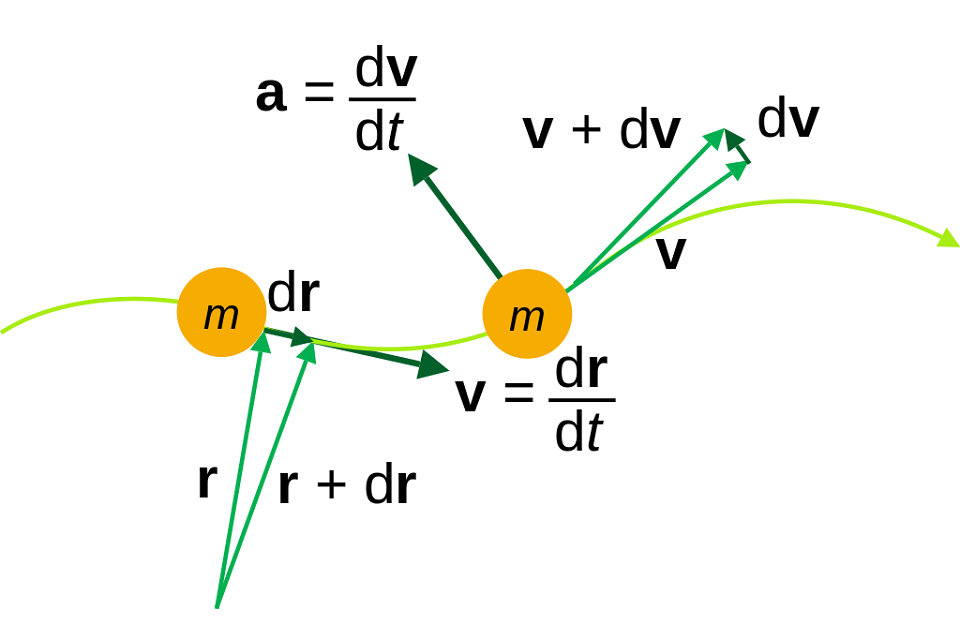
एक कण की वेग एक वेक्टर मात्रा है जो गति की दिशा और कण की गति की परिमाण का वर्णन करती है। अधिक गणितीय रूप से, एक बिंदु के स्थिति वेक्टर के परिवर्तन की दर, समय के संबंध में बिंदु की वेग है। समय अंतराल द्वारा एक कण के दो पदों के अंतर को विभाजित करके गठित अनुपात पर विचार करें। इस अनुपात को उस समय अंतराल पर औसत वेग कहा जाता है और इसे वेग = विस्थापन / समय के रूप में परिभाषित किया जाता है

जहां interP समय अंतराल पर स्थिति वेक्टर में परिवर्तन है।
समय अंतराल के रूप में सीमा में छोटे और छोटे हो जाते हैं, औसत वेग स्थिति वेक्टर का समय व्युत्पन्न हो जाता है,

किसी ऑब्जेक्ट की गति परिमाण है | वी | इसकी वेग का। यह एक स्केलर मात्रा है:

जहां कण की प्रक्षेपवक्र के साथ मापा चाप लंबाई है। समय के साथ एक कण द्वारा यात्रा की जाने वाली यह चाप-लंबाई एक घटती मात्रा है। इसलिए, डीएस / डीटी गैर-ऋणात्मक है, जिसका अर्थ है कि गति भी गैर-नकारात्मक है।
त्वरण
वेग वेक्टर परिमाण में और दिशा में या दोनों एक बार में बदल सकते हैं। इसलिए, त्वरण वेक्टर वेक्टर की परिमाण और उस वेक्टर की दिशा में परिवर्तन की दर के परिवर्तन की दर है। गति को परिभाषित करने के लिए एक कण की स्थिति के संबंध में उपयोग की जाने वाली वही तर्क, त्वरण को परिभाषित करने के लिए वेग पर लागू किया जा सकता है। एक कण का त्वरण वेक्टर वेक्टर के परिवर्तन की दर से परिभाषित वेक्टर है। एक समय अंतराल पर एक कण का औसत त्वरण अनुपात के रूप में परिभाषित किया जाता है।

जहां veV वेग वेक्टर में अंतर है और यह समय अंतराल है।
कण का त्वरण औसत त्वरण की सीमा है क्योंकि समय अंतराल शून्य तक पहुंचता है, जो समय व्युत्पन्न होता है,
या


किसी वस्तु के त्वरण की परिमाण परिमाण है | ए | इसके त्वरण वेक्टर के। यह एक स्केलर मात्रा है:

सापेक्ष स्थिति वेक्टर

जो उनके स्थिति वैक्टर के घटकों के बीच अंतर है।

यदि बिंदु बी में स्थिति घटक हैं

तो बिंदु बी के सापेक्ष बिंदु ए की स्थिति उनके घटकों के बीच अंतर है:

सापेक्ष वेग
किसी अन्य के सापेक्ष एक बिंदु की गति केवल उनके वेगों के बीच अंतर है

जो उनके वेग के घटकों के बीच अंतर है।
यदि बिंदु ए में वेग घटक हैं
और बिंदु बी में वेग घटक हैं


तो बिंदु बी के सापेक्ष बिंदु ए की गति उनके घटकों के बीच अंतर है:
वैकल्पिक रूप से, यह वही परिणाम सापेक्ष स्थिति वेक्टर आर बी / ए के समय व्युत्पन्न की गणना करके प्राप्त किया जा सकता है।

ऐसे मामले में जहां वेग प्रकाश सी (आमतौर पर 95% के भीतर) की गति के करीब है, रिश्तेदार वेग की एक और योजना जिसे रैपिडिटी कहा जाता है, जो वी से सी के अनुपात पर निर्भर करता है, विशेष सापेक्षता में उपयोग किया जाता है।
सापेक्ष त्वरण
एक बिंदु सी के सापेक्ष एक बिंदु सी का त्वरण बस उनके त्वरण के बीच अंतर है।

जो उनके त्वरण के घटकों के बीच अंतर है।
यदि बिंदु सी में त्वरण घटक हैं
और बिंदु बी त्वरण घटकों है


तो बिंदु बी के सापेक्ष बिंदु सी के त्वरण उनके घटकों के बीच अंतर है:
वैकल्पिक रूप से, यह वही परिणाम रिश्तेदार स्थिति वेक्टर पी बी / ए के व्युत्पन्न के दूसरी बार कंप्यूटिंग करके प्राप्त किया जा सकता है।

निरंतर त्वरण के तहत कण trajectories
निरंतर त्वरण के मामले में, अंतर समीकरण ईक 1) को एक बिंदु पी के त्वरण वेक्टर ए के रूप में एकीकृत किया जा सकता है, परिमाण और दिशा में स्थिर है। इस तरह के एक बिंदु को समान रूप से त्वरित गति से गुजरना कहा जाता है ।इस मामले में, वेग वी (टी) और फिर कण के प्रक्षेपवक्र पी (टी) को समय के संबंध में त्वरण समीकरण ए को एकीकृत करके प्राप्त किया जा सकता है।
यह मानते हुए कि स्थिति की प्रारंभिक स्थितियां, 



एक दूसरा एकीकरण अपने पथ (प्रक्षेपवक्र) पैदा करता है,

विस्थापन, वेग, त्वरण, और समय के बीच अतिरिक्त संबंध व्युत्पन्न किए जा सकते हैं। चूंकि त्वरण निरंतर है, 

समय, प्रतिस्थापन और सरलीकरण के लिए औसत त्वरण को हल करके स्पष्ट समय निर्भरता के बिना वेग, स्थिति और त्वरण के बीच संबंध हो सकता है


जहां dot डॉट उत्पाद को इंगित करता है, जो उचित है क्योंकि उत्पाद वैक्टर के बजाए स्केलर हैं।

डॉट को कोण के कोसाइन द्वारा प्रतिस्थापित किया जा सकता है 

गति की दिशा में त्वरण के मामले में, वैक्टरों के बीच कोण ( 

यह वैक्टर के परिमाण के लिए संकेत का उपयोग करके सरलीकृत किया जा सकता है 

यह कण की गति के पैरामीट्रिक समीकरणों को गति बनाम स्थिति के एक कार्टशियन संबंध में कम कर देता है। यह समय उपयोगी है जब समय अज्ञात है। हम यह भी जानते हैं 
















बेलनाकार-ध्रुवीय निर्देशांक में कण trajectories
एक्स-वाई विमान में ध्रुवीय निर्देशांक का उपयोग करके कण पी (टी) = (एक्स (टी), वाई (टी) और जेड (टी)) के प्रक्षेपवक्र को बनाने के लिए अक्सर सुविधाजनक होता है। इस मामले में, इसकी वेग और त्वरण एक सुविधाजनक रूप लेते हैं।
याद रखें कि एक कण पी का प्रक्षेपण इसके समन्वय वेक्टर पी द्वारा परिभाषित किया गया है जो एक निश्चित संदर्भ फ्रेम में मापा जाता है। चूंकि कण चलता है, इसके समन्वय वेक्टर पी (टी) अपने प्रक्षेपवक्र का पता लगाते हैं, जो अंतरिक्ष में एक वक्र है, द्वारा दिया गया:

जहां मैं, जे, और के क्रमशः संदर्भ फ्रेम एफ के एक्स, वाई और जेड अक्ष के साथ इकाई वैक्टर हैं।
एक कण पी पर विचार करें जो केवल एक परिपत्र सिलेंडर आर (टी) = स्थिर की सतह पर चलता है, सिलेंडर की धुरी के साथ निश्चित फ्रेम एफ के जेड अक्ष को संरेखित करना संभव है। फिर, एक्स-वाई विमान में इस अक्ष के चारों ओर कोण θ का उपयोग प्रक्षेपवक्र को परिभाषित करने के लिए किया जा सकता है,

पी (टी) के लिए बेलनाकार निर्देशांक को रेडियल और टेंगेंशियल यूनिट वैक्टर पेश करके सरलीकृत किया जा सकता है,

और प्राथमिक गणना से उनके समय डेरिवेटिव्स:




इस नोटेशन का उपयोग करते हुए, पी (टी) फॉर्म लेता है,

जहां आर त्रिज्या आर के सिलेंडर की सतह पर केवल कण के मामले में स्थिर है।
सामान्य रूप से, प्रक्षेपवक्र पी (टी) को गोलाकार सिलेंडर पर झूठ बोलने के लिए बाध्य नहीं किया जाता है, इसलिए त्रिज्या आर समय के साथ बदलता है और बेलनाकार-ध्रुवीय निर्देशांक में कण का प्रक्षेपवक्र बन जाता है:

जहां आर, थेटा, और ज़ेड समय के निरंतर अलग-अलग कार्य हो सकते हैं और सादगी के लिए फ़ंक्शन नोटेशन गिरा दिया जाता है। वेग वेक्टर वी पी प्रक्षेपण पी (टी) का समय व्युत्पन्न है, जो उपज करता है: 
इसी तरह, त्वरण ए पी , जो वेग वी पी का समय व्युत्पन्न है, द्वारा दिया गया है:

अवधि 

लगातार त्रिज्या
यदि कण के प्रक्षेपण को सिलेंडर पर झूठ बोलने के लिए बाध्य किया जाता है, तो त्रिज्या आर स्थिर होता है और वेग और त्वरण वैक्टर सरल होते हैं। वी पी की गति प्रक्षेपवक्र पी (टी) का समय व्युत्पन्न है,
त्वरण वेक्टर बन जाता है:


प्लानर सर्कुलर ट्रैजेक्टोरिज
एक परिपत्र सिलेंडर पर एक कण प्रक्षेपण का एक विशेष मामला तब होता है जब ज़ेड अक्ष के साथ कोई आंदोलन नहीं होता है:

जहां आर और जेड 0 स्थिरांक हैं। इस मामले में, वेग वी पी द्वारा दिया गया है:

कहा पे

सिलेंडर के जेड अक्ष के चारों ओर यूनिट वेक्टर ई θ की कोणीय वेग है।
त्वरण कण पी के ए पी अब द्वारा दिया गया है:
अवयव


क्रमशः, त्वरण के रेडियल और स्पर्शिक घटक कहा जाता है।
कोणीय वेग और कोणीय त्वरण के लिए संकेत अक्सर परिभाषित किया जाता है

इसलिए सर्कुलर ट्रैजेक्टोरियों के लिए रेडियल और टेंगेंशियल त्वरण घटक भी लिखे गए हैं

विमान में चलने वाले शरीर में प्वाइंट ट्रैजेक्टोरियां
मैट्रिक्स प्रतिनिधित्व
विमान आर 2 में घूर्णन और अनुवाद का संयोजन एक निश्चित प्रकार के 3×3 मैट्रिक्स द्वारा एक समरूप परिवर्तन के रूप में जाना जा सकता है। 3×3 सजातीय परिवर्तन 2×2 रोटेशन मैट्रिक्स ए (φ) और 2×1 अनुवाद वेक्टर डी = (डी एक्स , डीवाई ) से बनाया गया है, जैसा कि:

ये सजातीय परिवर्तन विमान z = 1 में बिंदुओं पर कठोर परिवर्तन करते हैं, जो निर्देशांक पी = (x, y, 1) के साथ बिंदुओं पर हैं।
विशेष रूप से, पी को एक निश्चित फ्रेम एफ के साथ एक संदर्भ फ्रेम एम संयोग में बिंदुओं के निर्देशांक को परिभाषित करने दें। फिर, जब एम की उत्पत्ति अनुवाद वेक्टर डी द्वारा विस्थापित होती है तो कोण के ang से संबंधित कोण φ द्वारा घुमाए गए फ़ैंड की उत्पत्ति के सापेक्ष एफ के एक्स-अक्ष, एम में बिंदुओं के एफ में नए निर्देशांक इनके द्वारा दिए गए हैं:

सजातीय परिवर्तन affine परिवर्तनों का प्रतिनिधित्व करते हैं। यह फॉर्मूलेशन आवश्यक है क्योंकि अनुवाद आर 2 का रैखिक परिवर्तन नहीं है। हालांकि, प्रोजेक्टिव ज्यामिति का उपयोग करके, ताकि आर 2 को आर 3 का सबसेट माना जाता है, अनुवाद एफ़िन रैखिक परिवर्तन बन जाते हैं।
शुद्ध अनुवाद
यदि एक कठोर शरीर चलता है ताकि उसका संदर्भ फ्रेम एम निश्चित फ्रेम एफ के सापेक्ष घूर्णन (∅ = 0) घुमाए, गति को शुद्ध अनुवाद कहा जाता है। इस मामले में, शरीर में हर बिंदु का प्रक्षेपण एम की उत्पत्ति के प्रक्षेपण डी (टी) का ऑफसेट है, जो है:

इस प्रकार, शुद्ध अनुवाद में निकायों के लिए, शरीर में प्रत्येक बिंदु पी का वेग और त्वरण निम्न द्वारा दिया जाता है:

जहां बिंदु समय के संबंध में व्युत्पन्न को दर्शाता है और वी ओ और ए ओ चलती फ्रेम एम की उत्पत्ति के क्रमशः वेग और त्वरण हैं। याद रखें एम में समन्वय वेक्टर पी स्थिर है, इसलिए इसका व्युत्पन्न शून्य है।
एक निश्चित अक्ष के चारों ओर एक शरीर के घूर्णन
घूर्णन या कोणीय किनेमेटिक्स किसी ऑब्जेक्ट के घूर्णन का विवरण है। रोटेशन के विवरण को अभिविन्यास का वर्णन करने के लिए कुछ विधि की आवश्यकता होती है। सामान्य विवरण में यूलर कोण और बीजगणितीय उत्पादों द्वारा प्रेरित मोड़ के सिनेमैटिक्स शामिल हैं।
निम्नानुसार, निश्चित अभिविन्यास की धुरी के बारे में सरल घूर्णन तक ध्यान प्रतिबंधित है। सुविधा के लिए जेड-अक्ष चुना गया है।
पद
यह इस साझा जेड-अक्ष के बारे में एक निश्चित एफ के सापेक्ष एक प्लानर संदर्भ फ्रेम एम की कोणीय स्थिति के रूप में एक घूर्णन के विवरण की अनुमति देता है। एम में समन्वय पी = (एक्स, वाई) एम मैट्रिक्स समीकरण द्वारा एफ में समन्वय पी = (एक्स, वाई) से संबंधित हैं:

कहा पे

घूर्णन मैट्रिक्स है जो समय के कार्य के रूप में एफ के सापेक्ष एम की कोणीय स्थिति को परिभाषित करता है।
वेग
यदि बिंदु पी एम में नहीं चलता है, तो एफ में इसकी वेग दी जाती है

निर्देशांक पी को खत्म करना और प्रक्षेपवक्र पी (टी) पर एक ऑपरेशन के रूप में लिखना सुविधाजनक है,

जहां मैट्रिक्स

एफ के सापेक्ष एम के कोणीय वेग मैट्रिक्स के रूप में जाना जाता है। पैरामीटर ω कोण θ का समय व्युत्पन्न है, जो है:

त्वरण
एफ में पी (टी) का त्वरण वेग के समय व्युत्पन्न के रूप में प्राप्त किया जाता है,

जो बन जाता है

कहा पे

एफ पर एम के कोणीय त्वरण मैट्रिक्स है, और

घूर्णन के विवरण में इन तीन मात्राओं को शामिल किया गया है:
कोणीय स्थिति: किसी ऑब्जेक्ट के बिंदु पर घूर्णन अक्ष पर किसी चयनित उत्पत्ति से उन्मुख दूरी बिंदु का पता लगाने वाला वेक्टर आर (टी) होता है। वेक्टर आर (टी) में कुछ प्रक्षेपण (या, समकक्ष, कुछ घटक) आर ⊥ (टी) घूर्णन की धुरी के लंबवत विमान पर होता है। फिर उस बिंदु की कोणीय स्थिति एक संदर्भ अक्ष (आमतौर पर सकारात्मक एक्स-अक्ष) से कोण θ है जिसे वेक्टर आर ⊥ (टी) में ज्ञात रोटेशन भावना (आमतौर पर दाएं हाथ के नियम द्वारा दिया जाता है) में होता है।
कोणीय वेग: कोणीय वेग ω वह दर है जिस पर कोणीय स्थिति θ समय टी के संबंध में बदलती है:

कोणीय वेग चित्रा 1 में एक वेक्टर द्वारा दर्शाया जाता है Ω परिमाण ω के साथ रोटेशन की धुरी के साथ इशारा करते हुए और दाएं हाथ के नियम के अनुसार रोटेशन की दिशा द्वारा निर्धारित भावना।
कोणीय त्वरण: कोणीय त्वरण α की परिमाण वह दर है जिस पर कोणीय वेग ω समय टी के संबंध में बदलता है:

सरल परिवर्तनीय एक्सचेंजों के साथ निरंतर कोणीय त्वरण के लिए अनुवादक किनेमेटिक्स के समीकरणों को आसानी से प्लानर रोटेशनल किनेमेटिक्स तक बढ़ाया जा सकता है:




यहां θ i और θ f क्रमशः प्रारंभिक और अंतिम कोणीय स्थितियां हैं, ω i और ω f क्रमशः प्रारंभिक और अंतिम कोणीय वेग हैं, और α निरंतर कोणीय त्वरण है। यद्यपि अंतरिक्ष में अंतरिक्ष और वेग में स्थिति दोनों असली वैक्टर (रोटेशन के तहत उनके गुणों के संदर्भ में) हैं, जैसे कोणीय वेग है, कोण स्वयं एक सच्चे वेक्टर नहीं है।
शरीर में प्वाइंट ट्रैजेक्टोरिज तीन आयामों में चल रहा है
किनेमेटिक्स में महत्वपूर्ण सूत्र एक गतिशील शरीर में गति के वेग और त्वरण को परिभाषित करते हैं क्योंकि वे त्रि-आयामी अंतरिक्ष में ट्रैजेक्टोरियों का पता लगाते हैं। यह शरीर के द्रव्यमान के केंद्र के लिए विशेष रूप से महत्वपूर्ण है, जिसका उपयोग न्यूटन के दूसरे कानून या लग्रेंज के समीकरणों का उपयोग करके गति के समीकरण प्राप्त करने के लिए किया जाता है।
पद
इन सूत्रों को परिभाषित करने के लिए, एक यांत्रिक प्रणाली के घटक बी के आंदोलन को घूर्णन के सेट [ए (टी)] और अनुवाद डी (टी) समरूप परिवर्तन में एकत्रित किया जाता है [टी (टी)] = [ए (टी), डी (टी)]। यदि पी चलती संदर्भ फ्रेम एम में मापा गया बिंदु बी में बिंदु पी के निर्देशांक है, तो एफ में पता लगाए गए इस बिंदु का प्रक्षेपण निम्नानुसार है:

यह नोटेशन पी = (एक्स, वाई, जेड, 1), और पी = (एक्स, वाई, जेड) के बीच अंतर नहीं करता है, जो संदर्भ में उम्मीद से स्पष्ट है।
पी के प्रक्षेपवक्र के लिए यह समीकरण एम में समन्वय वेक्टर पी की गणना करने के लिए उलटा जा सकता है:

यह अभिव्यक्ति इस तथ्य का उपयोग करती है कि एक रोटेशन मैट्रिक्स का स्थानांतरण भी इसके विपरीत है, जो है:

वेग
बिंदु प्रक्षेपण पी (टी) के साथ बिंदु पी की वेग इस स्थिति वेक्टर के समय व्युत्पन्न के रूप में प्राप्त की जाती है,

बिंदु समय के संबंध में व्युत्पन्न को दर्शाता है; क्योंकि पी स्थिर है, इसका व्युत्पन्न शून्य है।
इस सूत्र को फिक्स्ड फ्रेम एफ में मापा गया अपने प्रक्षेपण पी (टी) पर परिचालन करके पी की वेग प्राप्त करने के लिए संशोधित किया जा सकता है। वेग समीकरण उपज में पी के लिए उलटा परिवर्तन को प्रतिस्थापित करना:

मैट्रिक्स [एस] द्वारा दिया जाता है:

कहा पे
कोणीय वेग मैट्रिक्स है।

ऑपरेटर [एस] द्वारा गुणा करके, वेग वी पी के लिए सूत्र फॉर्म लेता है:

जहां वेक्टर ω मैट्रिक्स [Ω] के घटकों से प्राप्त कोणीय वेग वेक्टर है; वेक्टर

चलती फ्रेम एम के मूल ओ के सापेक्ष पी की स्थिति है; तथा

उत्पत्ति ओ की गति है।
त्वरण
एक चलती निकाय बी में एक बिंदु पी का त्वरण अपने वेग वेक्टर के समय व्युत्पन्न के रूप में प्राप्त किया जाता है:

कंप्यूटिंग द्वारा पहली बार इस समीकरण का विस्तार किया जा सकता है

तथा

त्वरण ए पी के लिए सूत्र अब प्राप्त किया जा सकता है:
या


जहां α कोणीय वेग मैट्रिक्स के व्युत्पन्न से प्राप्त कोणीय त्वरण वेक्टर है;
सापेक्ष स्थिति वेक्टर है (चलती फ्रेम एम के मूल ओ के सापेक्ष पी की स्थिति); तथा

चलती फ्रेम एम की उत्पत्ति का त्वरण है।