Электроактивные полимеры или EAP представляют собой полимеры, которые проявляют изменение размера или формы при стимуляции электрическим полем. Наиболее распространенные применения этого типа материалов — в приводах и датчиках. Типичным характерным свойством EAP является то, что они будут подвергаться большому количеству деформаций при сохранении больших сил.
Большинство исторических исполнительных механизмов изготовлены из керамических пьезоэлектрических материалов. Хотя эти материалы способны выдерживать большие силы, они обычно деформируют лишь часть процента. В конце 1990-х годов было продемонстрировано, что некоторые EAP могут проявлять до 380% деформации, что намного больше, чем любой керамический привод. Одним из наиболее распространенных приложений для EAP является разработка робототехники в области развития искусственных мышц; таким образом, электроактивный полимер часто называют искусственной мышцей.
история
Поле EAP появилось еще в 1880 году, когда Вильгельм Рентген разработал эксперимент, в котором он испытал влияние электростатического поля на механические свойства полосы натурального каучука. Резиновая полоса фиксировалась на одном конце и прикреплялась к массе на другом. Электрические заряды затем распылялись на резину, и было замечено, что длина изменилась на несколько сантиметров. MP Sacerdote продолжил эксперимент Рентгена, сформулировав теорию о деформационном ответе на прикладное электрическое поле в 1899 году. Именно в 1925 году был обнаружен первый пьезоэлектрический полимер (Electret). Электрет был образован путем объединения карнаубского воска, канифоли и пчелиного воска, а затем охлаждения раствора, когда он подвергается приложенному электрическому смещению постоянного тока. Затем смесь затвердевает в полимерный материал, который проявляет пьезоэлектрический эффект.
Большую часть этой области исследований также занимают полимеры, которые реагируют на условия окружающей среды, помимо применяемого электрического тока. В 1949 г. Качальский и др. показали, что когда коллагеновые нити окунаются в растворы кислот или щелочей, они будут реагировать с изменением объема. Было обнаружено, что коллагеновые нити расширяются в кислом растворе и сжимаются в щелочном растворе. Хотя другие стимулы (такие как рН) были исследованы, из-за его легкости и практичности большинство исследований было посвящено разработке полимеров, которые реагируют на электрические раздражители, чтобы имитировать биологические системы.
Следующий крупный прорыв в ПДООС состоялся в конце 1960-х годов. В 1969 году Кавай продемонстрировал, что поливинилиденфторид (PVDF) обладает большим пьезоэлектрическим эффектом. Это вызвало интерес к исследованиям в разработке других полимерных систем, которые бы продемонстрировали аналогичный эффект. В 1977 году первые электропроводящие полимеры были обнаружены Хидеки Ширакавой и др. Ширакава вместе с Аланом МакДиармидом и Аланом Хегером продемонстрировали, что полиацетилен является электропроводящим и что путем легирования его парами йода они могут повысить его проводимость на 8 порядков. Таким образом, проводимость была близка к проводимости металла. Было показано, что к концу 1980-х годов ряд других полимеров проявил пьезоэлектрический эффект или был продемонстрирован, что он является проводящим.
В начале 1990-х годов были разработаны и показаны ионные полимерно-металлические композиты (IPMC), обладающие электроактивными свойствами, намного превосходящими предыдущие EAP. Основным преимуществом IPMC было то, что они смогли показать активацию (деформацию) при напряжении до 1 или 2 вольта. Это на порядок меньше, чем любой предыдущий EAP. Мало того, что энергия активации этих материалов значительно ниже, но они также могут претерпевать гораздо большие деформации. Было показано, что IPMC демонстрируют напряжение до 380%, на порядок превышающее ранее разработанные EAP.
В 1999 году Йосеф Бар-Коэн предложил Армрестлинг Матч EAP Robotic Arm Against Human Challenge. Это была сложная задача, в которой исследовательские группы по всему миру соревновались в разработке роботизированной руки, состоящей из мышц EAP, которые могли бы победить человека в матче по борьбе с оружием. Первая задача была проведена на конференции Electroactive Polymer Actuators and Devices в 2005 году. Еще одной важной вехой в этой области является то, что первое коммерчески разработанное устройство, включающее EAP в качестве искусственной мускулатуры, было выпущено в 2002 году компанией Eamex в Японии. Это устройство было рыбой, которая умела плавать сама по себе, двигая хвостом с помощью мышцы EAP. Но прогресс в практическом развитии не был удовлетворительным.
Исследования DARPA в 1990-х годах в SRI International и во главе с Рон Пелрин разработали электроактивный полимер с использованием силиконовых и акриловых полимеров; технология была выделена в компанию Artificial Muscle в 2003 году, а промышленное производство началось в 2008 году. В 2010 году Artificial Muscle стала дочерней компанией Bayer MaterialScience.
Типы
EAP может иметь несколько конфигураций, но обычно разделены на два основных класса: диэлектрический и ионный.
диэлектрический
Диэлектрические EAP — это материалы, в которых срабатывание вызвано электростатическими силами между двумя электродами, которые сжимают полимер. Диэлектрические эластомеры способны к очень высоким напряжениям и в основном представляют собой конденсатор, который меняет свою емкость при приложении напряжения, позволяя полимеру сжиматься по толщине и расширяться в области из-за электрического поля. Этот тип EAP обычно требует большого напряжения срабатывания для создания высоких электрических полей (от сотен до тысяч вольт), но очень низкого потребления электроэнергии. Диэлектрические EAP не требуют питания, чтобы удерживать привод в заданном положении. Примерами являются электрострикционные полимеры и диэлектрические эластомеры.
Сегнетоэлектрические полимеры
Сегнетоэлектрические полимеры представляют собой группу кристаллических полярных полимеров, которые также являются сегнетоэлектриками, что означает, что они поддерживают постоянную электрическую поляризацию, которая может быть изменена или переключена во внешнем электрическом поле. Сегнетоэлектрические полимеры, такие как поливинилиденфторид (PVDF), используются в акустических преобразователях и электромеханических приводах из-за их присущего пьезоэлектрическому отклику и в качестве датчиков тепла из-за присущего им пироэлектрического отклика.
Электрострикционные привитые полимеры
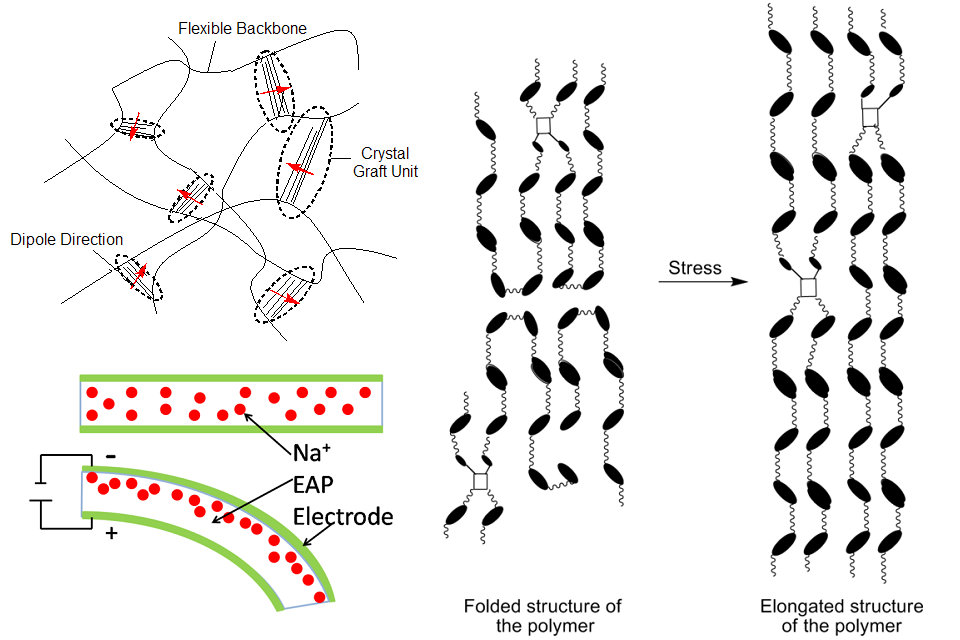
Электрострикционные привитые полимеры состоят из гибких магистральных цепей с разветвляющимися боковыми цепями. Боковые цепи на соседних магистральных полимерах сшиваются и образуют кристаллические единицы. Кристаллические единицы основной цепи и боковой цепи могут затем образовывать поляризованные мономеры, которые содержат атомы с частичными зарядами и генерируют дипольные моменты, показанные на рисунке 2. При приложении электрического поля к каждому парциальному заряду прикладывается сила и вызывает вращение целого полимерный блок. Это вращение вызывает электрострикционную деформацию и деформацию полимера.
Жидкие кристаллические полимеры
Жидкие кристаллические полимеры основной цепочки имеют мезогенные группы, связанные друг с другом гибким спейсером. Мезогены в позвоночнике образуют мезофазную структуру, заставляющую сам полимер принимать конформацию, совместимую со структурой мезофазы. Прямое связывание жидкокристаллического порядка с полимерной конформацией придало большое количество жидких кристаллических эластомеров основной цепочки. Синтез высокоориентированных эластомеров приводит к тому, что в направлении цепочки полимерных цепей происходит большое тепловое воздействие с изменением температуры, что приводит к уникальным механическим свойствам и потенциальным применениям в качестве механических приводов.
ионный
Ионные EAP, в которых срабатывание вызвано смещением ионов внутри полимера. Для приведения в действие требуется всего несколько вольт, но ионный поток подразумевает более высокую электрическую мощность, необходимую для приведения в действие, и требуется энергия для поддержания привода в заданном положении. Примерами ионных EAPS являются проводящие полимеры, ионные полимерно-металлические композиты (IPMC) и реагирующие гели. Еще одним примером является гелевый привод Bucky, который представляет собой полимерный слой из полиэлектролитного материала, состоящий из ионной жидкости, зажатой между двумя электродными слоями, состоящей из геля ионной жидкости, содержащей одностенные углеродные нанотрубки. Название происходит от подобия геля к бумаге, которая может быть сделана путем фильтрации углеродных нанотрубок, так называемой баккины.
Электрореологическая жидкость
Электрореологические жидкости изменяют вязкость раствора с применением электрического поля. Жидкость представляет собой суспензию полимеров в жидкости с низкой диэлектрической постоянной. При приложении большого электрического поля вязкость суспензии возрастает. Потенциальные применения этих жидкостей включают амортизаторы, крепления двигателя и акустические амортизаторы.
Ионный полимер-металлический композит
Композиты ионных полимерных металлов состоят из тонкой иономерной мембраны с электродами благородных металлов, нанесенных на ее поверхность. Он также имеет катионы для баланса заряда анионов, закрепленных на полимерной цепи. Они очень активные приводы, которые показывают очень высокую деформацию при низком приложенном напряжении и показывают низкий импеданс. Ионные композиты из полимерных металлов работают через электростатическое притяжение между катионными противоионами и катодом приложенного электрического поля, схематическое изображение показано на рисунке 3. Эти типы полимеров показывают наибольшие перспективы для биомиметических применений, поскольку волокна коллагена являются по существу состоящий из природных заряженных ионных полимеров. Нафион и Флемион обычно используют ионные полимерные металлические композиты.
Гели, чувствительные к стимулам
Восприимчивые к стимулам гели (гидрогели, когда набухающий агент представляет собой водный раствор) представляют собой особый вид набухающих полимерных сетей с объемным фазовым переходом. Эти материалы изменяют обратимо их объемные, оптические, механические и другие свойства путем очень небольших изменений определенных физических (например, электрического поля, света, температуры) или химических (концентраций) стимулов. Изменение объема этих материалов происходит путем набухания / сужения и зависит от диффузии. Наибольшее изменение объема твердых материалов оказывают гели. В сочетании с отличной совместимостью с технологиями микропроизводства особенно чувствительные к стимулам гидрогели имеют повышенный интерес к микросистемам с датчиками и приводами. Текущими областями исследований и применения являются системы химических датчиков, микрофлюидические и мультимодальные системы визуализации.
Сравнение диэлектрических и ионных EAP
Диэлектрические полимеры способны удерживать индуцированное смещение при активации под напряжением постоянного тока. Это позволяет рассматривать диэлектрические полимеры для роботизированных применений. Эти типы материалов также имеют высокую механическую плотность энергии и могут работать на воздухе без значительного снижения производительности. Однако диэлектрические полимеры требуют очень высоких полей активации (> 10 В / мкм), которые близки к уровню пробоя.
Активация ионных полимеров, с другой стороны, требует всего 1-2 вольта. Однако им необходимо поддерживать влажность, хотя некоторые полимеры были разработаны как автономные инкапсулированные активаторы, которые позволяют использовать их в сухих средах. Ионические полимеры также имеют низкую электромеханическую связь. Однако они идеальны для биомиметических устройств.
характеристика
В то время как существует много различных способов, которыми можно охарактеризовать электроактивные полимеры, здесь будут рассмотрены только три: кривая напряжений, динамический механический термический анализ и диэлектрический термический анализ.
Кривая напряжений
Кривые деформации напряжения обеспечивают информацию о механических свойствах полимера, таких как хрупкость, эластичность и предел текучести полимера. Это достигается путем обеспечения силы полимера с одинаковой скоростью и измерения деформации, которая возникает. Пример этой деформации показан на рисунке 4. Этот метод полезен для определения типа материала (хрупкого, жесткого и т. Д.), Но он является деструктивным методом, так как напряжение увеличивается до тех пор, пока полимер не сломается.
Динамический механический термический анализ (DMTA)
Оба динамического механического анализа являются неразрушающим методом, который полезен при понимании механизма деформации на молекулярном уровне. В ДМТА на полимер наносят синусоидальное напряжение и на основе деформации полимера получают модуль упругости и демпфирующие характеристики (при условии, что полимер является затухающим гармоническим осциллятором). Эластичные материалы принимают механическую энергию напряжения и преобразуют его в потенциальную энергию, которая впоследствии может быть восстановлена. Идеальная пружина будет использовать всю потенциальную энергию для восстановления своей первоначальной формы (без демпфирования), в то время как жидкость будет использовать всю потенциальную энергию для течения, никогда не возвращаясь в исходное положение или форму (высокое демпфирование). Вискоэластичный полимер будет демонстрировать сочетание обоих типов поведения.
Диэлектрический термический анализ (DETA)
DETA аналогичен DMTA, но вместо переменного механического усилия применяется переменное электрическое поле. Приложенное поле может привести к поляризации образца, и если полимер содержит группы, которые имеют постоянные диполи (как показано на рисунке 2), они будут совпадать с электрическим полем. Диэлектрическая проницаемость может быть измерена по изменению амплитуды и разрешена в компоненты диэлектрического хранения и потери. Поле электрического смещения можно также измерить, следуя за током. Как только поле будет удалено, диполы снова расслаиваются в случайную ориентацию.
Приложения
Материалы EAP могут быть легко изготовлены в различных формах из-за легкости обработки многих полимерных материалов, что делает их очень универсальными материалами. Одним из потенциальных приложений для EAP является то, что они потенциально могут быть интегрированы в микроэлектромеханические системы (MEMS) для создания интеллектуальных приводов.
Искусственные мышцы
В качестве наиболее перспективного направления научных исследований EAP использовались в искусственных мышцах. Их способность эмулировать работу биологических мышц с высокой вязкостью разрушения, большой ударной деформацией и присущим вибрационным демпфированием привлекает внимание ученых в этой области.
Тактильные дисплеи
В последние годы появились «электроактивные полимеры для обновляемых дисплеев Брайля», чтобы помочь слабовидящим людям в быстром чтении и компьютерной помощи. Эта концепция основана на использовании привода EAP, сконфигурированного в форме массива. Ряды электродов на одной стороне пленки EAP и столбцы на других активируют отдельные элементы в массиве. Каждый элемент монтируется с точкой Брайля и опускается путем приложения напряжения по толщине выбранного элемента, что приводит к уменьшению локальной толщины. Под управлением компьютера точки будут активированы для создания тактильных шаблонов максимумов и минимумов, представляющих информацию, которую нужно читать.
Визуальные и тактильные впечатления от виртуальной поверхности отображаются с помощью тактильного дисплея с высоким разрешением, так называемой «искусственной кожи» (рис. 6). Эти монолитные устройства состоят из массива тысяч мультимодальных модуляторов (пикселей исполнительного механизма) на основе чувствительных к стимулам гидрогелей. Каждый модулятор способен индивидуально изменять свою передачу, высоту и мягкость. Помимо их возможного использования в качестве графических дисплеев для слабовидящих, такие дисплеи интересны как свободные программируемые клавиши сенсорных панелей и пультов.
Microfluidics
Материалы EAP обладают огромным потенциалом для микрофлюидики, например, как системы доставки лекарств, микрожидкостные устройства и лабораторные приборы. Первая технология микрофлюидной платформы, описанная в литературе, основана на гелях, чувствительных к стимулам. Во избежание электролиза гидрофлюидных устройств на основе гидрогеля основаны главным образом термочувствительные полимеры с более низкими характеристиками температуры раствора (LCST), которые контролируются электротермической поверхностью. Известны два типа микронасосов: диффузионный микронасос и микронасос смещения. Микроклапаны, основанные на чувствительных к стимуляторам гидрогелях, демонстрируют некоторые преимущества, такие как толерантность частиц, отсутствие утечки и превосходное сопротивление давлению. Помимо этих микрофлюидных стандартных компонентов гидрогелевая платформа обеспечивает также химические датчики и новый класс микрожидкостных компонентов, химические транзисторы (также называемые хемостатическими клапанами). Эти устройства регулируют поток жидкости, если достигается пороговая концентрация определенного химического вещества. Химические транзисторы составляют основу микрохимиомеханических жидкостных интегральных схем. «Химические микросхемы» обрабатывают исключительно химическую информацию, питаются энергией, работают автоматически и способны к крупномасштабной интеграции.
Другая микрофлюидная платформа основана на иономерных материалах. Насосы, изготовленные из этого материала, могут предлагать работу с низким напряжением (батарея), чрезвычайно низкую сигнатуру шума, высокую эффективность системы и высокоточный контроль расхода.
Другая технология, которая может принести пользу из уникальных свойств приводов EAP, — это оптические мембраны. Благодаря их низкому модулю, механическому импедансу исполнительных механизмов, они хорошо соответствуют общим материалам оптической мембраны. Кроме того, один привод EAP способен генерировать смещения, которые варьируются от микрометров до сантиметров. По этой причине эти материалы могут использоваться для статической коррекции формы и подавления дрожания. Эти приводы также могут использоваться для коррекции оптических аберраций из-за атмосферных помех.
Поскольку эти материалы обладают отличным электроактивным характером, материалы EAP демонстрируют потенциал в исследованиях биомиметических роботов, сенсорах напряжения и области акустики, что сделает EAP более привлекательной темой исследования в ближайшем будущем. Они использовались для различных приводов, таких как мышцы лица и мышцы рук у гуманоидных роботов.
Будущие направления
Поле EAP далеко не зрело, что оставляет несколько проблем, над которыми еще нужно работать. Эффективность и долгосрочную стабильность EAP следует улучшить, создав водонепроницаемую поверхность. Это предотвратит испарение воды, содержащейся в EAP, а также уменьшит потенциальную потерю положительных противоионов, когда EAP будет погружен в водную среду. Повышенная поверхностная проводимость должна быть исследована с использованием методов для создания бесконтактной проводящей поверхности. Это можно было бы сделать, используя осаждение из паровой фазы или другие методы легирования. Можно также использовать проводящие полимеры для образования толстого проводящего слоя. Теплостойкий EAP был бы желательным для обеспечения работы при более высоких напряжениях без повреждения внутренней структуры EAP из-за выработки тепла в композите EAP. Разработка EAP в различных конфигурациях (например, волокна и пучки волокон) также будет полезна для увеличения диапазона возможных режимов движения.