I polimeri elettroattivi, o EAP, sono polimeri che mostrano un cambiamento di dimensioni o forma quando stimolati da un campo elettrico. Le applicazioni più comuni di questo tipo di materiale sono gli attuatori e i sensori. Una proprietà caratteristica tipica di un EAP è che subiranno una grande quantità di deformazione mentre sostengono forze grandi.
La maggior parte degli attuatori storici sono realizzati con materiali piezoelettrici ceramici. Mentre questi materiali sono in grado di resistere a grandi forze, generalmente deformano solo una frazione di una percentuale. Alla fine degli anni ’90, è stato dimostrato che alcuni EAP possono presentare un ceppo fino al 380%, che è molto più di qualsiasi attuatore ceramico. Una delle applicazioni più comuni per gli EAP è nel campo della robotica nello sviluppo dei muscoli artificiali; quindi, un polimero elettroattivo viene spesso definito come un muscolo artificiale.
Storia
Il campo degli EAP è emerso nel 1880, quando Wilhelm Röntgen progettò un esperimento in cui testò l’effetto di un campo elettrostatico sulle proprietà meccaniche di una striscia di gomma naturale. La striscia di gomma era fissata ad un’estremità e fissata a una massa all’altra. Le cariche elettriche sono state quindi spruzzate sulla gomma e si è osservato che la lunghezza variava di alcuni centimetri. M.P. Sacerdote seguì l’esperimento di Roentgen formulando una teoria sulla risposta alla deformazione ad un campo elettrico applicato nel 1899. Fu nel 1925 che fu scoperto il primo polimero piezoelettrico (Electret). L’elettrete è stato formato combinando cera di carnauba, colofonia e cera d’api, e quindi raffreddando la soluzione mentre è soggetta a una polarizzazione elettrica CC applicata. La miscela si solidificerebbe quindi in un materiale polimerico che mostrava un effetto piezoelettrico.
Anche i polimeri che rispondono alle condizioni ambientali, oltre a una corrente elettrica applicata, sono stati una grande parte di questa area di studio. Nel 1949 Katchalsky et al. hanno dimostrato che quando i filamenti di collagene sono immersi in soluzioni acide o alcaline, rispondono con un cambiamento di volume. I filamenti di collagene sono stati trovati per espandersi in una soluzione acida e contrarsi in una soluzione alcalina. Sebbene siano stati studiati altri stimoli (come il pH), per la sua facilità e praticità la maggior parte delle ricerche è stata dedicata allo sviluppo di polimeri che rispondono a stimoli elettrici per imitare i sistemi biologici.
Il prossimo importante passo avanti negli EAP è avvenuto alla fine degli anni ’60. Nel 1969 Kawai dimostrò che il polivinilidene fluoruro (PVDF) mostra un grande effetto piezoelettrico. Ciò ha innescato l’interesse della ricerca nello sviluppo di altri sistemi di polimeri che mostrerebbero un effetto simile. Nel 1977 i primi polimeri a conduzione elettrica furono scoperti da Hideki Shirakawa et al. Shirakawa insieme ad Alan MacDiarmid e Alan Heeger hanno dimostrato che il poliacetilene era elettricamente conduttivo e che drogandolo con vapore di iodio, potevano aumentare la conduttività di 8 ordini di grandezza. Quindi la conduttanza era vicina a quella di un metallo. Alla fine degli anni ’80, era stato dimostrato che un certo numero di altri polimeri mostrava un effetto piezoelettrico o si dimostrava conduttivo.
Nei primi anni ’90, i compositi metallo-polimero ionico (IPMC) sono stati sviluppati e mostrati per mostrare proprietà elettroattive di gran lunga superiori ai precedenti EAP. Il vantaggio principale degli IPMC era che erano in grado di mostrare l’attivazione (deformazione) a tensioni fino a 1 o 2 volt. Questo è un ordine di grandezza inferiore a qualsiasi EAP precedente. Non solo l’energia di attivazione per questi materiali era molto più bassa, ma potevano anche subire deformazioni molto più grandi. È stato dimostrato che gli IPMC esibiscono ovunque fino al 380% di deformazione, ordini di grandezza maggiori rispetto agli EAP precedentemente sviluppati.
Nel 1999, Yoseph Bar-Cohen propose l’Armwrestling Match of EAP Robotic Arm Against Human Challenge. Questa è stata una sfida in cui gruppi di ricerca di tutto il mondo si sono sfidati a progettare un braccio robotico costituito da muscoli EAP in grado di sconfiggere un essere umano in una partita di braccio di ferro. La prima sfida si è tenuta alla Conferenza elettroattuatori di attuatori e dispositivi per polimeri nel 2005. Un’altra importante pietra miliare del settore è che il primo dispositivo commercialmente sviluppato che includeva EAP come muscolo artificiale è stato prodotto nel 2002 da Eamex in Giappone. Questo dispositivo era un pesce che era in grado di nuotare da solo, muovendo la coda usando un muscolo EAP. Ma i progressi nello sviluppo pratico non sono stati soddisfacenti.
La ricerca finanziata dal DARPA negli anni ’90 presso la SRI International e guidata da Ron Pelrine ha sviluppato un polimero elettroattivo utilizzando polimeri siliconici e acrilici; la tecnologia è stata scorporata nella società Artificial Muscle nel 2003, con la produzione industriale a partire dal 2008. Nel 2010, Artificial Muscle è diventata una sussidiaria di Bayer MaterialScience.
tipi
EAP può avere diverse configurazioni, ma sono generalmente divise in due classi principali: Dielettrico e Ionico.
Dielettrico
Gli EAP dielettrici sono materiali in cui l’azionamento è causato da forze elettrostatiche tra due elettrodi che comprimono il polimero. Gli elastomeri dielettrici sono capaci di ceppi molto alti e sono fondamentalmente un condensatore che cambia la sua capacità quando viene applicata una tensione permettendo al polimero di comprimere di spessore ed espandersi nell’area a causa del campo elettrico. Questo tipo di EAP richiede tipicamente una grande tensione di attuazione per produrre alti campi elettrici (da centinaia a migliaia di volt), ma un consumo energetico molto basso. Gli EAP dielettrici non richiedono alimentazione per mantenere l’attuatore in una determinata posizione. Esempi sono i polimeri elettrostrittivi e gli elastomeri dielettrici.
Polimeri ferroelettrici
I polimeri ferroelettrici sono un gruppo di polimeri polari cristallini che sono anche ferroelettrici, nel senso che mantengono una polarizzazione elettrica permanente che può essere invertita, o commutata, in un campo elettrico esterno. I polimeri ferroelettrici, come il polivinilidene fluoruro (PVDF), vengono utilizzati nei trasduttori acustici e negli attuatori elettromeccanici a causa della loro intrinseca risposta piezoelettrica e come sensori di calore a causa della loro risposta piroelettrica intrinseca.
Polimeri con innesto elettrostrittivo
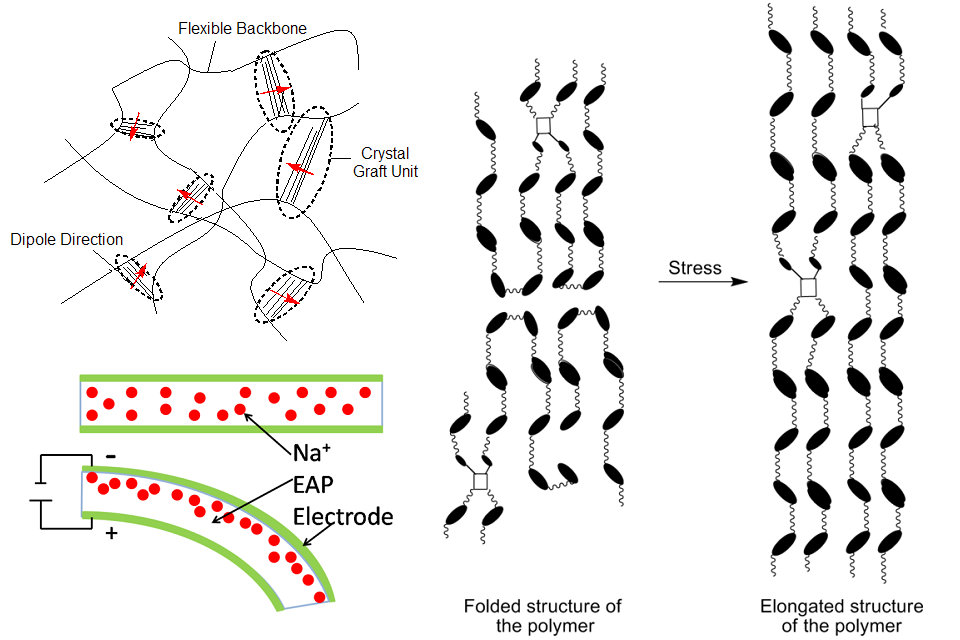
I polimeri ad innesto elettrostrittivo sono costituiti da catene di dorsali flessibili con catene laterali ramificate. Le catene laterali sui polimeri della dorsale adiacente cross linkano e formano unità cristalline. Le unità di cristallo della catena laterale e della catena laterale possono quindi formare monomeri polarizzati, che contengono atomi con cariche parziali e generare momenti di dipolo, mostrati in Figura 2. Quando viene applicato un campo elettrico, una forza viene applicata a ciascuna carica parziale e provoca la rotazione dell’intero unità polimerica. Questa rotazione provoca sollecitazione elettrostatica e deformazione del polimero.
Polimeri cristallini liquidi
I polimeri cristallini liquidi a catena principale hanno gruppi mesogenici collegati tra loro da un distanziatore flessibile. I mesogeni all’interno di una spina dorsale formano la struttura mesofase che fa sì che il polimero stesso adotti una conformazione compatibile con la struttura della mesofase. L’accoppiamento diretto dell’ordine cristallino liquido con la conformazione del polimero ha dato agli elastomeri liquidi cristallini della catena principale una grande quantità di interesse. La sintesi di elastomeri altamente orientati porta ad avere un grande azionamento termico di deformazione lungo la direzione della catena del polimero con variazione di temperatura con conseguenti proprietà meccaniche uniche e potenziali applicazioni come attuatori meccanici.
Ionico
EAP ionici, in cui l’attivazione è causata dallo spostamento di ioni all’interno del polimero. Sono necessari solo pochi volt per l’attuazione, ma il flusso ionico implica una maggiore potenza elettrica necessaria per l’attuazione e l’energia è necessaria per mantenere l’attuatore in una determinata posizione. Esempi di EAPS ionici sono polimeri conduttivi, compositi metallo-polimero ionico (IPMC) e gel reattivi. Ancora un altro esempio è un attuatore di gel Bucky, che è uno strato di materiale polielettrolico supportato da polimero costituito da un liquido ionico inserito tra due strati di elettrodi costituiti da un gel di liquido ionico contenente nanotubi di carbonio a parete singola. Il nome deriva dalla somiglianza del gel con la carta che può essere prodotta filtrando i nanotubi di carbonio, il cosiddetto buckypaper.
Fluido elettroreologico
I fluidi elettroreologici cambiano la viscosità di una soluzione con l’applicazione di un campo elettrico. Il fluido è una sospensione di polimeri in un liquido a bassa costante dielettrica. Con l’applicazione di un grande campo elettrico aumenta la viscosità della sospensione. Le potenziali applicazioni di questi fluidi includono ammortizzatori, supporti motore e ammortizzatori acustici.
Composito metallo-polimero ionico
I compositi metallici polimerici ionici consistono in una sottile membrana ionomerica con elettrodi di metallo nobile placcato sulla sua superficie. Ha anche cationi per bilanciare la carica degli anioni fissati alla spina dorsale del polimero. Sono attuatori molto attivi che mostrano una deformazione molto alta a bassa tensione applicata e mostrano una bassa impedenza. I composti metallici polimerici ionici funzionano attraverso l’attrazione elettrostatica tra i contro ioni cationici e il catodo del campo elettrico applicato, una rappresentazione schematica è mostrata in Figura 3. Questi tipi di polimeri mostrano la maggiore promessa per gli usi biomimetici in quanto le fibre di collagene sono essenzialmente composto da polimeri ionici caricati naturali. Nafion e Flemion sono comunemente usati compositi metallici polimerici ionici.
Gel stimolanti
I gel reattivi agli stimoli (gli idrogel, quando l’agente di rigonfiamento è una soluzione acquosa) sono un tipo speciale di reti polimeriche rigonfiabili con comportamento di transizione di fase del volume. Questi materiali cambiano in modo reversibile il loro volume, le proprietà ottiche, meccaniche e altre alterazioni molto piccole di determinati stimoli fisici (ad esempio campo elettrico, luce, temperatura) o chimici (concentrazioni). Il cambiamento di volume di questi materiali avviene tramite gonfiore / restringimento ed è basato sulla diffusione. I gel forniscono il più grande cambiamento nel volume di materiali a stato solido. Combinato con un’eccellente compatibilità con le tecnologie di micro-fabbricazione, in particolare gli idrogel reattivi agli stimoli sono di forte interesse per i microsistemi con sensori e attuatori. Gli attuali campi di ricerca e applicazione sono sistemi di sensori chimici, microfluidica e sistemi di imaging multimodali.
Confronto tra EAP dielettrici e ionici
I polimeri dielettrici sono in grado di mantenere il loro spostamento indotto mentre sono attivati sotto una tensione continua. Ciò consente di considerare i polimeri dielettrici per applicazioni robotiche. Questi tipi di materiali hanno anche un’alta densità di energia meccanica e possono essere azionati in aria senza un notevole calo delle prestazioni. Tuttavia, i polimeri dielettrici richiedono campi di attivazione molto elevati (> 10 V / μm) che sono vicini al livello di guasto.
L’attivazione dei polimeri ionici, d’altra parte, richiede solo 1-2 volt. Hanno tuttavia bisogno di mantenere l’umidità, anche se alcuni polimeri sono stati sviluppati come attivatori incapsulati autonomi che ne consentono l’uso in ambienti asciutti. I polimeri ionici hanno anche un basso accoppiamento elettromeccanico. Sono comunque ideali per i dispositivi biomimetici.
Caratterizzazione
Mentre ci sono molti modi in cui i polimeri elettroattivi possono essere caratterizzati, solo tre saranno affrontati qui: curva sforzo-deformazione, analisi termica meccanica dinamica e analisi termica dielettrica.
Curva di sforzo-deformazione
Le curve di deformazione da sforzo forniscono informazioni sulle proprietà meccaniche del polimero, come la fragilità, l’elasticità e la resistenza allo snervamento del polimero. Questo viene fatto fornendo una forza al polimero ad una velocità uniforme e misurando la deformazione che ne risulta. Un esempio di questa deformazione è mostrato nella figura 4. Questa tecnica è utile per determinare il tipo di materiale (fragile, resistente, ecc.), Ma è una tecnica distruttiva poiché lo stress viene aumentato fino a quando le fratture polimeriche.
Analisi termica meccanica dinamica (DMTA)
Sia l’analisi meccanica dinamica è una tecnica non distruttiva che è utile per comprendere il meccanismo di deformazione a livello molecolare. In DMTA una sollecitazione sinusoidale viene applicata al polimero e, in base alla deformazione del polimero, si ottengono il modulo elastico e le caratteristiche di smorzamento (supponendo che il polimero sia un oscillatore armonico smorzato). I materiali elastici prendono l’energia meccanica dallo stress e la convertono in energia potenziale che può essere successivamente recuperata. Una molla ideale utilizzerà tutta l’energia potenziale per recuperare la sua forma originale (senza smorzamento), mentre un liquido utilizzerà tutta l’energia potenziale per fluire, senza mai tornare alla sua posizione o forma originale (alto smorzamento). Un polimero viscoeleastico mostrerà una combinazione di entrambi i tipi di comportamento.
Analisi termica dielettrica (DETA)
Il DETA è simile al DMTA, ma al posto di una forza meccanica alternata viene applicato un campo elettrico alternato. Il campo applicato può portare alla polarizzazione del campione, e se il polimero contiene gruppi che hanno dipoli permanenti (come in Figura 2), si allineeranno con il campo elettrico. La permittività può essere misurata dal cambiamento di ampiezza e risolta in componenti di stoccaggio dielettrico e di perdita. Il campo di spostamento elettrico può anche essere misurato seguendo la corrente. Una volta rimosso il campo, i dipoli si rilasseranno in un orientamento casuale.
applicazioni
I materiali EAP possono essere facilmente realizzati in varie forme grazie alla facilità nella lavorazione di molti materiali polimerici, rendendoli materiali molto versatili. Una potenziale applicazione per gli EAP è che possono potenzialmente essere integrati in sistemi microelettromeccanici (MEMS) per produrre attuatori intelligenti.
Muscoli artificiali
Come la direzione di ricerca pratica più prospettica, gli EAP sono stati utilizzati nei muscoli artificiali. La loro capacità di emulare il funzionamento dei muscoli biologici con elevata resistenza alla frattura, grande sforzo di azionamento e smorzamento delle vibrazioni intrinseco attirano l’attenzione degli scienziati in questo campo.
Display tattili
Negli ultimi anni sono emersi “polimeri elettroattivi per display Braille aggiornabili” per aiutare gli ipovedenti nella lettura veloce e nella comunicazione assistita da computer. Questo concetto si basa sull’utilizzo di un attuatore EAP configurato in forma di matrice. Le file di elettrodi su un lato di un film EAP e le colonne sull’altro attivano i singoli elementi dell’array. Ogni elemento è montato con un punto Braille e viene abbassato applicando una tensione sullo spessore dell’elemento selezionato, provocando una riduzione dello spessore locale. Sotto controllo del computer, i punti sarebbero attivati per creare pattern tattili di alti e bassi che rappresentassero le informazioni da leggere.
Le impressioni visive e tattili di una superficie virtuale sono visualizzate da un display tattile ad alta risoluzione, una cosiddetta “pelle artificiale” (Fig.6). Questi dispositivi monolitici consistono in una serie di migliaia di modulatori multimodali (pixel attuatori) basati su idrogel reattivi agli stimoli. Ogni modulatore è in grado di cambiare individualmente la loro trasmissione, altezza e morbidezza. Oltre al loro possibile utilizzo come display grafici per ipovedenti tali schermi sono interessanti come tasti programmabili gratuiti di touchpad e console.
microfluidica
I materiali EAP hanno un enorme potenziale per la microfluidica, ad es. come sistemi di somministrazione di farmaci, dispositivi microfluidici e lab-on-a-chip. Una prima tecnologia di piattaforma microfluidica riportata in letteratura si basa su gel stimolanti. Per evitare l’elettrolisi dei dispositivi microfluidici basati su idrogel d’acqua si basano principalmente su polimeri che rispondono alla temperatura con caratteristiche della temperatura della soluzione critica inferiore (LCST), che sono controllate da un’interfaccia elettrotermica. Sono noti due tipi di micropompe, una micropompa di diffusione e una micropompa di spostamento. Le microvalvole basate su idrogel reattivi agli stimoli mostrano alcune proprietà vantaggiose come la tolleranza delle particelle, nessuna perdita e resistenza alla pressione eccezionale. Oltre a questi componenti standard microfluidici, la piattaforma idrogel fornisce anche sensori chimici e una nuova classe di componenti microfluidici, i transistor chimici (chiamati anche valvole chemostat). Questi dispositivi regolano un flusso di liquido se viene raggiunta una concentrazione di soglia di alcuni prodotti chimici. I transistor chimici costituiscono la base dei circuiti integrati fluidici microchemomeccanici. Gli “IC chimici” elaborano esclusivamente informazioni chimiche, sono auto-alimentati energeticamente, funzionano automaticamente e sono in grado di integrarsi su larga scala.
Un’altra piattaforma microfluidica è basata su materiali ionomerici. Le pompe prodotte da tale materiale potrebbero offrire funzionamento a bassa tensione (batteria), firma a basso rumore, elevata efficienza del sistema e controllo estremamente accurato della portata.
Un’altra tecnologia che può beneficiare delle proprietà uniche degli attuatori EAP sono le membrane ottiche. Grazie al loro basso modulo, l’impedenza meccanica degli attuatori, sono ben abbinati ai comuni materiali a membrana ottica. Inoltre, un singolo attuatore EAP è in grado di generare spostamenti che vanno dai micrometri ai centimetri. Per questo motivo, questi materiali possono essere utilizzati per la correzione della forma statica e la soppressione del jitter. Questi attuatori potrebbero anche essere utilizzati per correggere le aberrazioni ottiche a causa di interferenze atmosferiche.
Poiché questi materiali mostrano un eccellente carattere elettroattivo, i materiali EAP mostrano un potenziale nella ricerca di robot biomimetici, sensori di stress e campo acustico, che renderanno gli EAP diventare un argomento di studio più attraente nel prossimo futuro. Sono stati usati per vari attuatori come muscoli facciali e muscoli delle braccia in robot umanoidi.
Direzioni future
Il campo degli EAP è ben lungi dall’essere maturo, il che lascia diversi problemi su cui è ancora necessario lavorare. Le prestazioni e la stabilità a lungo termine dell’EAP dovrebbero essere migliorate progettando una superficie impermeabile all’acqua. Ciò impedirà l’evaporazione dell’acqua contenuta nell’EAP e inoltre ridurrà la potenziale perdita degli ioni positivi quando l’EAP sta operando immerso in un ambiente acquoso. La conduttività superficiale migliorata dovrebbe essere esplorata usando metodi per produrre una superficie conduttiva priva di difetti. Questo potrebbe essere fatto usando la deposizione di vapori metallici o altri metodi di drogaggio. Potrebbe anche essere possibile utilizzare polimeri conduttivi per formare uno spesso strato conduttore. EAP resistente al calore sarebbe auspicabile per consentire il funzionamento a tensioni più elevate senza danneggiare la struttura interna dell’EAP a causa della generazione di calore nel composito EAP. Anche lo sviluppo di EAP in diverse configurazioni (ad es. Fibre e fasci di fibre) sarebbe vantaggioso, al fine di aumentare la gamma di possibili modi di movimento.