Elektroaktive Polymere (EAPs) sind Polymere, die bei Anregung durch ein elektrisches Feld eine Veränderung der Größe oder Form zeigen. Die häufigsten Anwendungen dieser Art von Material sind Aktuatoren und Sensoren. Eine typische charakteristische Eigenschaft eines EAP ist, dass sie eine große Verformung erfahren, während sie große Kräfte aufrechterhalten.
Die meisten historischen Aktuatoren bestehen aus keramischen piezoelektrischen Materialien. Während diese Materialien großen Kräften standhalten können, verformen sie sich normalerweise nur um einen Bruchteil eines Prozents. In den späten 1990er Jahren wurde gezeigt, dass einige EAPs eine Dehnung von bis zu 380% aufweisen können, was weit über jedem keramischen Aktuator liegt. Eine der häufigsten Anwendungen für EAPs liegt auf dem Gebiet der Robotik bei der Entwicklung künstlicher Muskeln; Daher wird ein elektroaktives Polymer häufig als künstlicher Muskel bezeichnet.
Geschichte
Das Feld der EAPs entstand 1880, als Wilhelm Röntgen ein Experiment entwarf, in dem er die Wirkung eines elektrostatischen Feldes auf die mechanischen Eigenschaften eines Naturkautschukstreifens untersuchte. Der Gummistreifen wurde an einem Ende befestigt und am anderen Ende an einer Masse befestigt. Dann wurden elektrische Ladungen auf den Kautschuk gesprüht, und es wurde beobachtet, dass sich die Länge um einige Zentimeter veränderte. MP Sacerdote folgte Roentgens Experiment, indem er 1899 eine Theorie zur Dehnungsantwort auf ein angelegtes elektrisches Feld formulierte. 1925 wurde das erste piezoelektrische Polymer entdeckt (Electret). Elektret wurde gebildet, indem Carnaubawachs, Kolophonium und Bienenwachs kombiniert wurden und die Lösung dann abgekühlt wurde, während sie einer angelegten elektrischen Gleichstromvorspannung ausgesetzt war. Die Mischung würde sich dann zu einem Polymermaterial verfestigen, das einen piezoelektrischen Effekt zeigte.
Polymere, die auf andere Umgebungsbedingungen als einen angelegten elektrischen Strom ansprechen, waren ebenfalls ein großer Teil dieses Untersuchungsbereichs. 1949 wurde von Katchalsky et al. zeigten, dass Kollagenfilamente beim Eintauchen in Säure- oder Alkalilösungen mit einer Volumenänderung reagieren. Es wurde gefunden, dass die Kollagenfilamente in einer sauren Lösung expandieren und sich in einer Alkalilösung kontrahieren. Obwohl andere Stimuli (wie der pH-Wert) untersucht wurden, wurde aufgrund der Einfachheit und Zweckmäßigkeit der Forschung die Entwicklung von Polymeren gewidmet, die auf elektrische Stimuli reagieren, um biologische Systeme nachzuahmen.
Der nächste große Durchbruch bei den EAPs fand Ende der 1960er Jahre statt. Kawai zeigte 1969, dass Polyvinylidenfluorid (PVDF) einen großen piezoelektrischen Effekt aufweist. Dies weckte das Forschungsinteresse an der Entwicklung anderer Polymersysteme, die einen ähnlichen Effekt zeigen würden. Die ersten elektrisch leitfähigen Polymere wurden 1977 von Hideki Shirakawa et al. Entdeckt. Shirakawa demonstrierte zusammen mit Alan MacDiarmid und Alan Heeger, dass Polyacetylen elektrisch leitfähig ist und dass es mit Joddampf dotiert werden kann, um die Leitfähigkeit um 8 Größenordnungen zu erhöhen. Somit war der Leitwert dem eines Metalls nahe. In den späten achtziger Jahren wurde gezeigt, dass eine Reihe anderer Polymere einen piezoelektrischen Effekt aufweisen oder leitfähig sind.
In den frühen 1990er Jahren wurden ionische Polymer-Metall-Verbundwerkstoffe (IPMCs) entwickelt, deren elektroaktive Eigenschaften den bisherigen EAP weit überlegen waren. Der Hauptvorteil von IPMCs war, dass sie eine Aktivierung (Deformation) bei Spannungen von 1 oder 2 Volt zeigen konnten. Dies ist eine Größenordnung weniger als bei jedem früheren EAP. Die Aktivierungsenergie für diese Materialien war nicht nur viel niedriger, sie könnten auch viel größere Verformungen erfahren. Es wurde gezeigt, dass IPMCs eine Dehnung von bis zu 380% aufweisen, eine Größenordnung größer als die zuvor entwickelten EAPs.
1999 schlug Yoseph Bar-Cohen das Armwrestling-Match von EAP Robotic Arm Against Human Challenge vor. Dies war eine Herausforderung, bei der Forschergruppen auf der ganzen Welt um einen Roboterarm konkurrierten, der aus EAP-Muskeln bestand, die einen Menschen in einem Armdrückenkampf besiegen konnten. Die erste Herausforderung fand 2005 auf der Electroactive Polymer Actuators and Devices Conference statt. Ein weiterer wichtiger Meilenstein auf diesem Gebiet ist, dass das erste kommerziell entwickelte Gerät, das EAPs als künstlichen Muskel enthält, 2002 von Eamex in Japan hergestellt wurde. Dieses Gerät war ein Fisch, der alleine schwimmen konnte und seinen Schwanz mit einem EAP-Muskel bewegte. Die Fortschritte in der praktischen Entwicklung waren jedoch nicht zufriedenstellend.
DARPA-finanzierte Forschung in den 1990er Jahren bei SRI International unter der Leitung von Ron Pelrine entwickelte ein elektroaktives Polymer unter Verwendung von Silikon- und Acrylpolymeren; Die Technologie wurde 2003 in die Firma Artificial Muscle ausgegliedert. Die industrielle Produktion begann im Jahr 2008. Seit 2010 ist Artificial Muscle eine Tochtergesellschaft von Bayer MaterialScience.
Typen
EAP kann mehrere Konfigurationen haben, wird aber im Allgemeinen in zwei Hauptklassen unterteilt: dielektrische und ionische.
Dielektrikum
Dielektrische EAPs sind Materialien, bei denen die Betätigung durch elektrostatische Kräfte zwischen zwei Elektroden bewirkt wird, die das Polymer pressen. Dielektrische Elastomere sind für sehr hohe Dehnungen geeignet und stellen im Wesentlichen einen Kondensator dar, der seine Kapazität ändert, wenn eine Spannung angelegt wird, indem das Polymer aufgrund des elektrischen Felds in der Dicke zusammengedrückt werden kann und sich in der Fläche ausdehnt. Diese Art von EAP erfordert typischerweise eine große Betätigungsspannung, um hohe elektrische Felder (Hunderte bis Tausende von Volt) zu erzeugen, jedoch einen sehr geringen Stromverbrauch. Dielektrische EAPs benötigen keine Energie, um den Aktuator an einer bestimmten Position zu halten. Beispiele sind elektrostriktive Polymere und dielektrische Elastomere.
Ferroelektrische Polymere
Ferroelektrische Polymere sind eine Gruppe von kristallinen polaren Polymeren, die auch ferroelektrisch sind. Das bedeutet, dass sie eine permanente elektrische Polarisation aufrechterhalten, die in einem externen elektrischen Feld umgekehrt oder geschaltet werden kann. Ferroelektrische Polymere wie Polyvinylidenfluorid (PVDF) werden aufgrund ihrer inhärenten piezoelektrischen Antwort in akustischen Wandlern und elektromechanischen Aktuatoren und als Wärmesensoren aufgrund ihrer inhärenten pyroelektrischen Antwort verwendet.
Elektrostriktive Pfropfpolymere
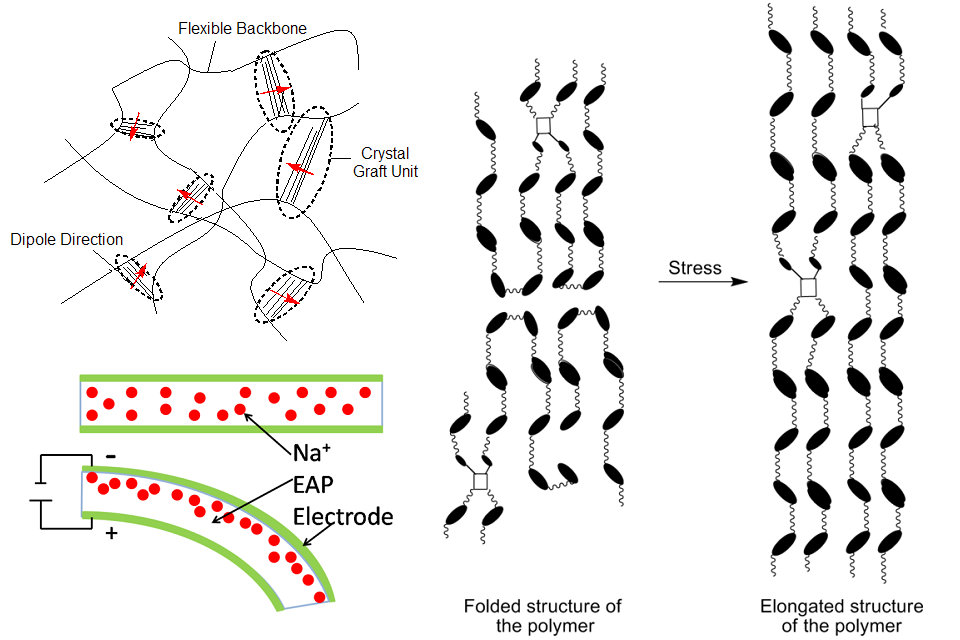
Elektrostriktive Pfropfpolymere bestehen aus flexiblen Grundgerüstketten mit verzweigten Seitenketten. Die Seitenketten benachbarter Rückgratpolymere vernetzen sich und bilden Kristalleinheiten. Das Rückgrat und die Seitenkettenkristalleinheiten können dann polarisierte Monomere bilden, die Atome mit Teilladungen enthalten und Dipolmomente erzeugen (siehe Abbildung 2). Wenn ein elektrisches Feld angelegt wird, wird auf jede Teilladung eine Kraft ausgeübt, die eine Drehung des Ganzen bewirkt Polymer-Einheit. Diese Drehung verursacht eine elektrostriktive Dehnung und Verformung des Polymers.
Flüssigkristalline Polymere
Flüssigkristallpolymere der Hauptkette haben mesogene Gruppen, die durch einen flexiblen Spacer miteinander verbunden sind. Die Mesogene in einem Grundgerüst bilden die Mesophasenstruktur, wodurch das Polymer selbst eine Konformation annimmt, die mit der Struktur der Mesophase kompatibel ist. Die direkte Kopplung der flüssigkristallinen Ordnung mit der Polymerkonformation hat Flüssigkristall-Hauptketten-Elastomere auf großes Interesse gestoßen. Die Synthese von hochorientierten Elastomeren führt zu einer starken thermischen Belastung durch Dehnung entlang der Polymerkettenrichtung mit Temperaturänderungen, was zu einzigartigen mechanischen Eigenschaften und möglichen Anwendungen als mechanische Aktuatoren führt.
Ionisch
Ionische EAPs, bei denen die Aktivierung durch die Verdrängung von Ionen im Polymer bewirkt wird. Für die Betätigung werden nur wenige Volt benötigt, aber der Ionenfluss impliziert eine höhere elektrische Leistung, die zur Betätigung benötigt wird, und Energie ist erforderlich, um den Aktuator in einer bestimmten Position zu halten. Beispiele für ionische EAPS sind leitfähige Polymere, ionische Polymer-Metall-Verbundstoffe (IPMCs) und responsive Gele. Ein weiteres Beispiel ist ein Bucky-Gel-Aktuator, bei dem es sich um eine polymergeträgerte Schicht aus Polyelektrolytmaterial handelt, die aus einer ionischen Flüssigkeit besteht, die zwischen zwei Elektrodenschichten angeordnet ist, die aus einem Gel aus ionischer Flüssigkeit bestehen, das einwandige Kohlenstoffnanoröhren enthält. Der Name kommt von der Ähnlichkeit des Gels mit dem Papier, das durch Filtern von Kohlenstoffnanoröhren, dem sogenannten Buckypaper, hergestellt werden kann.
Elektrorheologische Flüssigkeit
Elektrorheologische Flüssigkeiten verändern die Viskosität einer Lösung durch Anlegen eines elektrischen Feldes. Die Flüssigkeit ist eine Suspension von Polymeren in einer Flüssigkeit mit niedriger Dielektrizitätskonstante. Mit dem Anlegen eines großen elektrischen Feldes steigt die Viskosität der Suspension. Mögliche Anwendungen dieser Flüssigkeiten umfassen Stoßdämpfer, Motorlager und akustische Dämpfer.
Ionischer Polymer-Metall-Verbund
Ionische Polymer-Metall-Verbundwerkstoffe bestehen aus einer dünnen ionomeren Membran, auf deren Oberfläche Edelmetallelektroden aufgebracht sind. Es hat auch Kationen, um die Ladung der Anionen, die an dem Polymerrückgrat befestigt sind, auszugleichen. Sie sind sehr aktive Aktuatoren, die bei niedriger angelegter Spannung eine sehr hohe Verformung zeigen und eine niedrige Impedanz aufweisen. Ionische Polymer-Metall-Verbundwerkstoffe arbeiten durch elektrostatische Anziehung zwischen den kationischen Gegenionen und der Kathode des angelegten elektrischen Feldes. Eine schematische Darstellung ist in Abbildung 3 dargestellt. Diese Polymertypen zeigen die größten Aussichten für die Verwendung als Bio-Mimetika, da Kollagenfasern im Wesentlichen sind bestehend aus natürlich geladenen ionischen Polymeren. Nafion und Flemion sind üblicherweise ionische Polymermetallverbundstoffe.
Stimuli-responsive Gele
Stimuli-responsive Gele (Hydrogele, wenn das Quellmittel eine wässrige Lösung ist) sind eine besondere Art quellbarer Polymernetzwerke mit Volumenphasenübergangsverhalten. Diese Materialien verändern reversibel ihr Volumen, ihre optischen, mechanischen und sonstigen Eigenschaften durch sehr geringe Änderungen bestimmter physikalischer (z. B. elektrisches Feld, Licht, Temperatur) oder chemischer (Konzentrationen) Stimuli. Die Volumenänderung dieser Materialien erfolgt durch Aufquellen / Schrumpfen und ist diffusionsbasiert. Gele sorgen für die größte Volumenänderung von Festkörpermaterialien. Kombiniert mit einer hervorragenden Kompatibilität mit Mikrofabrikationstechnologien sind insbesondere auf Stimuli ansprechende Hydrogele für Mikrosysteme mit Sensoren und Aktuatoren von zunehmendem Interesse. Aktuelle Forschungs- und Anwendungsgebiete sind chemische Sensorsysteme, Mikrofluidik und multimodale Bildgebungssysteme.
Vergleich von dielektrischen und ionischen EAPs
Dielektrische Polymere können ihre induzierte Verschiebung halten, während sie unter einer Gleichspannung aktiviert werden. Dies ermöglicht die Berücksichtigung dielektrischer Polymere für Roboteranwendungen. Diese Arten von Materialien haben auch eine hohe mechanische Energiedichte und können an Luft betrieben werden, ohne dass die Leistung erheblich beeinträchtigt wird. Dielektrische Polymere erfordern jedoch sehr hohe Aktivierungsfelder (> 10 V / µm), die nahe am Durchbruchniveau liegen.
Die Aktivierung ionischer Polymere erfordert dagegen nur 1 bis 2 Volt. Sie müssen jedoch die Feuchtigkeit aufrechterhalten, obwohl einige Polymere als in sich geschlossene, eingekapselte Aktivatoren entwickelt wurden, die ihren Einsatz in trockenen Umgebungen ermöglichen. Ionische Polymere haben auch eine geringe elektromechanische Kopplung. Sie sind jedoch ideal für biimimetische Geräte.
Charakterisierung
Während elektroaktive Polymere auf viele verschiedene Arten charakterisiert werden können, werden hier nur drei angesprochen: Spannungs-Dehnungs-Kurve, dynamische mechanische Wärmeanalyse und dielektrische Wärmeanalyse.
Spannungs-Dehnungskurve
Spannungs-Dehnungskurven liefern Informationen über die mechanischen Eigenschaften des Polymers wie Sprödigkeit, Elastizität und Streckgrenze des Polymers. Dies geschieht, indem das Polymer mit einer gleichmäßigen Geschwindigkeit mit einer Kraft beaufschlagt wird und die resultierende Verformung gemessen wird. Ein Beispiel für diese Verformung ist in Abbildung 4 dargestellt. Diese Technik eignet sich zur Bestimmung des Materialtyps (spröde, zäh usw.), ist jedoch eine zerstörerische Technik, da die Spannung bis zum Bruch des Polymers zunimmt.
Dynamisch-Mechanische Thermoanalyse (DMTA)
Bei beiden dynamischen mechanischen Analysen handelt es sich um eine zerstörungsfreie Technik, die zum Verständnis des Verformungsmechanismus auf molekularer Ebene hilfreich ist. In DMTA wird das Polymer mit einer sinusförmigen Spannung beaufschlagt, und basierend auf der Deformation des Polymers werden der Elastizitätsmodul und die Dämpfungseigenschaften erhalten (vorausgesetzt, das Polymer ist ein gedämpfter harmonischer Oszillator). Elastische Materialien nehmen die mechanische Energie der Belastung auf und wandeln sie in potentielle Energie um, die später wiedergewonnen werden kann. Eine ideale Feder nutzt die gesamte potentielle Energie, um ihre ursprüngliche Form wieder herzustellen (keine Dämpfung), während eine Flüssigkeit die gesamte potentielle Energie zum Fließen verwendet und niemals in ihre ursprüngliche Position oder Form zurückkehrt (hohe Dämpfung). Ein viskoeleastisches Polymer zeigt eine Kombination beider Verhaltensweisen.
Dielektrische thermische Analyse (DETA)
DETA ist ähnlich wie DMTA, jedoch wird anstelle einer mechanischen Wechselkraft ein elektrisches Wechselfeld angelegt. Das angelegte Feld kann zur Polarisierung der Probe führen. Wenn das Polymer Gruppen enthält, die permanente Dipole aufweisen (wie in Abbildung 2), richten sie sich mit dem elektrischen Feld aus. Die Permittivität kann aus der Änderung der Amplitude gemessen und in dielektrische Speicher- und Verlustkomponenten aufgelöst werden. Das elektrische Verschiebungsfeld kann auch durch Folgen des Stroms gemessen werden. Sobald das Feld entfernt ist, entspannen sich die Dipole in eine zufällige Orientierung.
Anwendungen
EAP-Materialien können leicht in verschiedenen Formen hergestellt werden, da viele polymere Materialien einfach verarbeitet werden können, wodurch sie sehr vielseitige Materialien sind. Eine mögliche Anwendung für EAPs ist, dass sie möglicherweise in mikroelektromechanische Systeme (MEMS) integriert werden können, um intelligente Aktuatoren herzustellen.
Künstliche Muskeln
Als prospektivste praktische Forschungsrichtung wurden EAPs in künstlichen Muskeln eingesetzt. Ihre Fähigkeit, die Funktionsweise biologischer Muskeln mit hoher Bruchzähigkeit, großer Betätigungsbelastung und inhärenter Schwingungsdämpfung zu simulieren, erregt die Aufmerksamkeit der Wissenschaftler auf diesem Gebiet.
Taktile Anzeigen
In den letzten Jahren hat sich „elektroaktive Polymere für auffrischbare Braillezeilen“ herausgebildet, um Sehbehinderte beim schnellen Lesen und computergestützten Kommunikation zu unterstützen. Dieses Konzept basiert auf der Verwendung eines EAP-Stellglieds, das in einer Array-Form konfiguriert ist. Elektrodenreihen auf einer Seite eines EAP-Films und Spalten auf der anderen Seite aktivieren einzelne Elemente im Array. Jedes Element ist mit einem Braillepunkt versehen und wird durch Anlegen einer Spannung über die Dicke des ausgewählten Elements abgesenkt, wodurch eine lokale Dickenreduzierung bewirkt wird. Unter Computersteuerung würden Punkte aktiviert werden, um taktile Muster von Höhen und Tiefen zu erzeugen, die die zu lesende Information darstellen.
Visuelle und taktile Eindrücke einer virtuellen Oberfläche werden durch eine hochauflösende taktile Anzeige dargestellt, eine sogenannte „künstliche Haut“ (Abb. 6). Diese monolithischen Geräte bestehen aus einer Reihe von Tausenden von multimodalen Modulatoren (Aktuatorpixel), die auf auf Stimuli ansprechenden Hydrogelen basieren. Jeder Modulator kann seine Übertragung, Höhe und Weichheit individuell ändern. Neben ihrer möglichen Verwendung als grafische Anzeigen für sehbehinderte Personen sind solche Anzeigen als frei programmierbare Tasten von Touchpads und Konsolen interessant.
Mikrofluidik
EAP-Materialien haben ein enormes Potenzial für die Mikrofluidik, z. B. als Arzneimittelabgabesysteme, Mikrofluidik-Geräte und Lab-on-a-Chip. Eine erste in der Literatur beschriebene mikrofluidische Plattformtechnologie basiert auf Stimuli-responsiven Gelen. Um die Elektrolyse von Wasser zu vermeiden, basieren mikrofluidische Vorrichtungen auf Hydrogelbasis hauptsächlich auf temperaturabhängigen Polymeren mit niedrigeren kritischen Lösungstemperaturen (LCST), die durch eine elektrothermische Grenzfläche gesteuert werden. Es sind zwei Arten von Mikropumpen bekannt, eine Diffusionsmikropumpe und eine Verdrängungsmikropumpe. Mikroventile, die auf auf Stimuli ansprechende Hydrogele basieren, zeigen einige vorteilhafte Eigenschaften wie Partikeltoleranz, kein Durchsickern und hervorragende Druckfestigkeit. Neben diesen mikrofluidischen Standardkomponenten bietet die Hydrogel-Plattform auch chemische Sensoren und eine neuartige Klasse mikrofluidischer Komponenten, die chemischen Transistoren (auch als Chemostatventile bezeichnet). Diese Geräte regulieren einen Flüssigkeitsstrom, wenn eine bestimmte Konzentration einer Chemikalie erreicht wird. Chemische Transistoren bilden die Basis für mikrochemisch-mechanische integrierte Schaltungen. „Chemische ICs“ verarbeiten ausschließlich chemische Informationen, sind energieautark, arbeiten automatisch und können in großem Umfang integriert werden.
Eine weitere mikrofluidische Plattform basiert auf ionomeren Materialien. Aus diesem Material hergestellte Pumpen könnten einen Betrieb mit niedriger Spannung (Batterie), eine äußerst geringe Geräuschentwicklung, einen hohen Systemwirkungsgrad und eine sehr genaue Steuerung der Flussrate bieten.
Eine weitere Technologie, die von den einzigartigen Eigenschaften der EAP-Aktuatoren profitieren kann, sind optische Membranen. Aufgrund ihres geringen Moduls, der mechanischen Impedanz der Aktuatoren, sind sie gut auf gängige Materialien für optische Membranen abgestimmt. Ein einzelner EAP-Aktuator kann außerdem Verschiebungen im Bereich von Mikrometern bis Zentimetern erzeugen. Aus diesem Grund können diese Materialien zur statischen Formkorrektur und zur Jitterunterdrückung verwendet werden. Diese Aktuatoren könnten auch zur Korrektur optischer Aberrationen aufgrund von atmosphärischen Interferenzen verwendet werden.
Da diese Materialien einen hervorragenden elektroaktiven Charakter aufweisen, weisen EAP-Materialien ein Potenzial in der biomimetischen Roboterforschung, in Stresssensoren und im Bereich der Akustik auf, wodurch EAPs in naher Zukunft zu einem attraktiveren Forschungsthema werden. Sie wurden für verschiedene Aktuatoren wie Gesichts- und Armmuskulatur in humanoiden Robotern verwendet.
Zukünftige Richtungen
Der Bereich der EAPs ist bei weitem noch nicht ausgereift, so dass einige Probleme bestehen, die noch bearbeitet werden müssen. Die Leistung und Langzeitstabilität des EAP sollte durch die Gestaltung einer wasserundurchlässigen Oberfläche verbessert werden. Dies verhindert die Verdampfung von Wasser, das in dem EAP enthalten ist, und verringert auch den potenziellen Verlust der positiven Gegenionen, wenn der EAP in einer wässrigen Umgebung eingetaucht ist. Die verbesserte Oberflächenleitfähigkeit sollte mit Methoden untersucht werden, um eine defektfreie leitfähige Oberfläche zu erzeugen. Dies könnte möglicherweise unter Verwendung von Metallbedampfung oder anderen Dotierungsverfahren erfolgen. Es kann auch möglich sein, leitfähige Polymere zur Bildung einer dicken leitfähigen Schicht zu verwenden. Ein hitzebeständiger EAP wäre wünschenswert, um einen Betrieb bei höheren Spannungen zu ermöglichen, ohne die interne Struktur des EAP aufgrund der Erzeugung von Wärme in dem EAP-Verbundstoff zu beschädigen. Die Entwicklung von EAPs in verschiedenen Konfigurationen (z. B. Fasern und Faserbündeln) wäre ebenfalls vorteilhaft, um den Bereich möglicher Bewegungsmodi zu vergrößern.