Пьезоэлектрический двигатель или пьезомотор — это тип электродвигателя, основанный на изменении формы пьезоэлектрического материала при приложении электрического поля. Пьезоэлектрические двигатели используют обратный пьезоэлектрический эффект пьезоэлектрических датчиков, в которых деформация или вибрация пьезоэлектрического материала вызывает электрический заряд. Электрическая схема создает акустические или ультразвуковые колебания в пьезоэлектрическом материале, которые производят линейное или вращательное движение. В одном механизме удлинение в одной плоскости создает ряд растяжек и положений, аналогичных тому, как движется гусеница.
история
В 1947 году были получены первые керамические образцы титаната бария, и с этого момента теоретически возможно производство пьезоэлектрических двигателей. Но первый такой двигатель появился только 20 лет спустя. Изучая пьезоэлектрические преобразователи в энергетических режимах, сотрудник Киевского политехнического института В.В.Лавриненко обнаружил вращение одного из них в держателе. Поняв причину этого явления, в 1964 году он создал первый пьезоэлектрический двигатель вращения, за которым последовал линейный двигатель для управления реле. Для первого двигателя с прямым контактом трения он создает группы необратимых двигателей с механическим соединением пьезоэлектрического элемента с ротором через толкатели. Исходя из этого, он предлагает десятки конструкций необратимых двигателей, охватывающих диапазон скоростей от 0 до 10000 об / мин и диапазон крутящего момента от 0 до 100 Нм. Используя два неоригинальных двигателя, Лавриненко изначально решает проблему обратного. Встроенный на валу одного двигателя он устанавливает второй двигатель. Он решает проблему моторного ресурса, возбуждая крутильные колебания в пьезоэлектрическом элементе.
За десять лет, предшествовавших аналогичной работе в стране и за рубежом, Лавриненко разработал почти все основные принципы строительства пьезоэлектрических двигателей, не исключая возможности их работы в режиме генераторов электроэнергии.
Учитывая обещание развития, Лавриненко вместе с соавторами, которые помогли ему выполнить его предложения, он защищает многочисленные авторские свидетельства и патенты. В Киевском политехническом институте создается отраслевая лаборатория пьезоэлектрических двигателей под руководством Лавриненко, и в мире организовано первое в мире серийное производство пьезомоторов для VCR Electronics-552. Впоследствии двигатели изготавливаются для слайд-проекторов Днепр-2, кинокамер, приводов шаровых кранов и т. Д. В 1980 году Energia публикует первую книгу о пьезоэлектрических двигателях, в которой есть интерес. Активное развитие пьезомоторов в Каунасском политехническом институте под руководством проф. Рагульскис К.М. Вишневский В.С., аспирант в прошлом, Лавриненко, уезжает в Германию, где продолжает работать над внедрением линейных пьезоэлектрических двигателей в PHyzical Instrument. Постепенное изучение и развитие пьезоэлектрических двигателей выходит за пределы СССР. В Японии и Китае активно развиваются и внедряются волновые двигатели, в Америке — сублиминальные двигатели вращения.
строительство
Ультразвуковой двигатель имеет значительно меньшие размеры и массу по сравнению с электромагнитным двигателем, подобным силовым характеристикам. Отсутствие обмоток, пропитанных адгезивными соединениями, делает его пригодным для использования в условиях вакуума. Ультразвуковой двигатель имеет значительный момент самоторможения (до 50% максимального крутящего момента) при отсутствии напряжения питания из-за его конструктивных особенностей. Это позволяет очень малые дискретные угловые смещения (от единиц секунд дуги) без использования каких-либо специальных мер. Это свойство связано с квазинепрерывным характером пьезомотора. Действительно, пьезоэлектрический элемент, который преобразует электрические колебания в механические, питается не постоянным, а переменным напряжением резонансной частоты. При применении одного или двух импульсов вы можете получить очень небольшое угловое смещение ротора. Например, некоторые образцы ультразвуковых двигателей с резонансной частотой 2 МГц и рабочей частотой 0,2-6 об / сек при применении одного импульса к пластинам пьезоэлектрического элемента в идеальном случае обеспечивали бы угловое смещение ротора 1 / 9.900.000-1 / 330.000 величина круга, то есть 0.13-3.9 угловых секунд.
Одним из серьезных недостатков такого двигателя является его значительная чувствительность к проглатыванию твердых веществ (например, песка). С другой стороны, пьезомоторы могут работать в жидкой среде, например, в воде или в масле.
Функциональные принципы
Некоторые обычно используемые принципы:
Двигатель движущейся волны
Двигатель стоячей волны
Двигатель инерции, также известный как двигатель скольжения
Двигатель «Inchworm»
пограничный мотор
Двигатели бегущей волны и стоячей волны и связанные с ними типы также называются вибрационными двигателями, поскольку они управляются вибрациями, генерируемыми пьезоэлектрическими твердотельными приводами. Напротив, инерционные, дюймовые и шаговые двигатели называются (пьезоэлектрическими) шаговыми двигателями, потому что их движение разделено на четко разграничивающие этапы. Однако эта классификация не всегда верна, в частности, с инерционными двигателями, так как теперь есть инерционные двигатели, принцип которых основан на резонансных колебаниях.
«Гибкий» статор (тонкая биморфная пластина, более тонкая пластинка, больший амплитуда колебаний и нижняя резонансная частота) прикладывается высокочастотное переменное напряжение, что заставляет его создавать ультразвуковые колебания, которые образуют механическую бегущую волну, который толкает (крючки), расположенные вблизи ротора. При перемещении влево толкатель заклинивается; при движении вправо он заклинивается. Все пьезоэлектрические двигатели с толкателями работают по этому принципу. Увеличивая количество толкателей, вы можете создавать двигатели с огромными отправными точками.
Простота этого принципа трудно реализовать. И если обычный электродвигатель можно сделать практически «на колене», ультразвуковой двигатель с высокой эффективностью 80-90% не может быть создан без сложного оборудования. Но если мы пренебрегаем эффективностью (получаем 50-60%), мы можем создать ультразвуковой двигатель дома.
Принцип, согласно которому все точки пьезоэлектрического элемента, которые вступают в контакт с ротором, должны двигаться по траекториям, близким к эллиптическому, является основой работы пьезоэлектрических двигателей вращения. Для этого в пьезоэлементе одновременно возбуждаются два типа взаимно ортогональных колебаний. Это может быть любая комбинация взаимно поперечных продольных, изгибных, сдвиговых и крутильных колебаний. Важно только то, что эти колебания не должны быть механически связаны, т. Е. Энергия от одного колебания не должна переходить на другое колебание (в квадратной пластине возбуждение продольных колебаний вдоль ее стороны приведет к возбуждению продольных колебаний с другой стороны, что является примером колебаний). Если колебания механически развязаны, то между ними может быть получен любой фазовый сдвиг. Оптимальным для пьезоэлектрических двигателей является сдвиг фазы на 90 градусов. В простейшем двигателе (рис.3) продольная длина волны электрически возбуждается в пьезоэлектрическом элементе, а поперечные волны, изгиб, возбуждаются, когда конец пьезоэлектрического элемента перемещается вдоль поверхности ротора. Размеры пьезоэлектрического элемента выбираются так, чтобы были механические резонансные и продольные и поперечные колебания. Тогда эффективность может превышать 80%. Для таких двигателей фрикционный контакт между ротором и статором происходит вдоль линии, что сокращает их срок службы. Захватывают только электроды (1), рис. 4 в пьезоэлектрическом элементе (2) крутильные колебания и другие электроды (3) — продольные колебания, вы можете создать двигатель с плоским трением. Проблема ресурсов Лавриненко решает таким образом.
Двигатели волновой волны
Двигатели с движущимися волнами — это в основном роторные двигатели. Они состоят из неподвижной части, статора и движущейся части, ротора. Статор содержит, по меньшей мере, два пьезоэлектрических преобразователя, которые преобразуют приложенное напряжение переменного тока в механические колебания. Преобразователи возбуждаются вне фазы, создавая бегущую волну на статоре. Это перемещается по фрикционному контакту между статором и ротором, находящимся в движении. Для достижения высоких амплитуд колебаний и, соответственно, скоростей, статор обычно резонирует на частотах в области ультразвука. Бегущая волна в линейных двигателях с бегущей волной намного дороже, поэтому линейные двигатели с бегущей волной еще не коммерчески доступны. Двигатели с волновыми волнами получили большую известность, особенно благодаря использованию в объективах камеры. Примеры этого можно найти в статье «Мотор движущейся волны».
Постоянные волновые двигатели
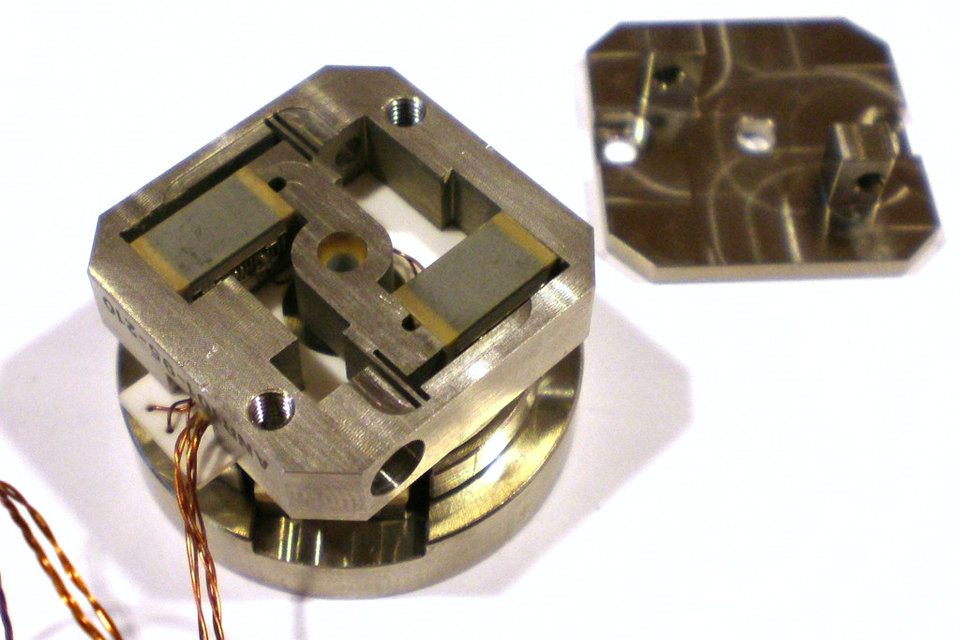
В двигателях с стоячей волной колебания в виде стоячей волны генерируются в статоре пьезоэлектрическими твердотельными приводами. В результате, в основном эллиптическое перемещение одной или нескольких контактных точек приводит в движение ротор. Контакт может быть временно прерван при высоких амплитудах колебаний, что приводит к ударам. Двигатели с постоянными волнами могут иметь много разных форм и генерировать вращательные и линейные движения. На рисунке слева показан вращающийся двигатель стоячей волны, приводимый в движение четырьмя пьезоприводами.
Инерционные двигатели
Двигатели инерции используют инерцию объекта, который нужно перемещать, чтобы перемещать его по фрикционному контакту. В классических инерциальных двигателях фаза медленного движения во фрикционном контакте подвержена статическому трению, в фазе быстрого движения инерционные силы становятся настолько большими, что части скользят друг над другом. Это изменение между статическим трением и трением скольжения привело к широко распространенному обозначению «моторы скольжения» (от «stick to stick» и «to slip» = скольжение) (см. Эффект скольжения). Но есть инерционные двигатели, которые работают без фаз задержания. В этих двигателях детали скользят друг на друга во время фаз привода.
Пьезоэлектрические инерционные двигатели могут быть очень простыми. В простейшем случае они состоят только из трех компонентов, как в примере напротив. Многочисленные формы инерционных двигателей можно различать, в частности, в зависимости от того, зафиксирован ли двигатель, управляющий твердотельным приводом, или двигается с двигателем. Большинство инерционных двигателей работают на низких частотах до нескольких кГц. Однако некоторые резонансные инерционные двигатели также работают в ультразвуковом диапазоне. Двигатели инерции — z. B. используется для позиционирования образца в микроскопии и стабилизации изображения в цифровых камерах.
Инжекторные двигатели
Так называемые «червячные» двигатели работают по принципу «зажима и скольжения», показанного противоположно. Принцип движения, подобный гусенице, был (например, для гусеничного англичан), который в целом описывает этот тип двигателя сегодня своим названием на фирменном наименовании «Inchworm». Двигатель, показанный на рисунке справа, состоит из двух прижимных приводов и одного подающего привода (сверху и снизу). Из-за работы с тактовой частотой двигатели «червячные» работают на низких частотах в звуковом диапазоне. Они рассчитаны на большую мощность и точность, меньше на высокую скорость.
Ходовые двигатели
В отличие от двигателей «дюйм червя», в так называемых шаговых двигателях, зажим и привод перехватываются одним и тем же, а не разными приводами. В примере, показанном на соседнем снимке, для этой цели используются два гибочных привода в биморфной конструкции (два привода плюс промежуточный слой). Контактные точки на их кончиках будут выполнять эллиптическое движение со свободным движением. Фактически, они прижимают часть этой дорожки к «ротору», элементу, который должен приводиться в движение, и нажимать его в нужном направлении. Из-за сдвинутого по фазе движения приводов всегда по крайней мере один зажимает ротор, чтобы он никогда не бежал.
Текущие проекты
Одна техника привода использует пьезоэлектрическую керамику для толкания статора. Эти пьезоэлектрические двигатели используют три группы кристаллов — две блокировки и один мотив, который постоянно подключается либо к корпусу двигателя, либо к статору (не к обоим). Движущая группа, зажатая между двумя другими, обеспечивает движение. Эти пьезоэлектрические двигатели являются принципиально шаговыми двигателями, причем каждый шаг состоит из двух или трех действий, основанных на типе блокировки. Эти двигатели также известны как двигатели с червячным двигателем. Другой механизм использует поверхностные акустические волны (ПАВ) для генерации линейного или вращательного движения.
Второй тип привода, скребковый двигатель, использует пьезоэлектрические элементы, связанные ортогонально с гайкой. Их ультразвуковые колебания вращают центральный винт. Это механизм прямого привода.
Блокирующие механизмы
Недействующее поведение пьезоэлектрического двигателя первого типа является одним из двух вариантов: нормально замкнутого или нормально свободного. Если на нормально заторможенный двигатель не подается питание, шпиндель или каретка (для вращающихся или линейных типов, соответственно) не перемещаются под внешним усилием. Шпиндель или каретка с нормально свободным двигателем свободно перемещается под внешним усилием. Однако, если обе блокирующие группы находятся в состоянии покоя, нормально свободный двигатель сопротивляется внешней силе, не создавая движущей силы.
Комбинация механических защелок и кристаллов может сделать то же самое, но ограничит максимальную скорость шага двигателя. Недействующее поведение двигателя второго типа заблокировано, поскольку приводной винт заблокирован резьбой на гайке. Таким образом, он удерживает свое положение при выключенном питании.
Шаговые действия
Независимо от типа блокировки, пьезоэлектрические двигатели ступенчатого типа — линейные и вращающиеся — используют один и тот же механизм для создания движения:
Во-первых, одна группа фиксирующих кристаллов активируется, чтобы зафиксировать одну сторону и разблокировать другую сторону «сэндвича» пьезо-кристаллов.
Затем инициируется и удерживается мотивная кристаллическая группа. Расширение этой группы перемещает разблокированную группу блокировки вдоль траектории движения двигателя. Это единственный этап, на котором движется двигатель.
Затем включается блокирующая группа, запускаемая на первой стадии (в нормально запирающих двигателях, в другой — триггерах).
Затем группа движений отпускает, убирая «заключительную» блокирующую группу.
Наконец, обе группы блокировки возвращаются к своим состояниям по умолчанию.
Действия прямого привода
Пьезоэлектрический двигатель с прямым приводом создает движение через непрерывную ультразвуковую вибрацию. Его схема управления применяет двухканальную синусоидальную или прямоугольную волну к пьезоэлектрическим элементам, которая соответствует резонансной частоте сгибания резьбовой трубки — обычно это ультразвуковая частота от 40 кГц до 200 кГц. Это создает орбитальное движение, которое вращает винт.
Скорость и точность
Рост и формирование пьезоэлектрических кристаллов является хорошо развитой отраслью, что дает очень однородное и последовательное искажение при заданной прикладной разности потенциалов. Это, в сочетании с минутной шкалой искажений, дает пьезоэлектрическому двигателю возможность делать очень тонкие шаги. Производители утверждают точность на нанометровой шкале. Высокая скорость реакции и быстрое искажение кристаллов также позволяют выполнять шаги на очень высоких частотах — выше 5 МГц. Это обеспечивает максимальную линейную скорость около 800 мм в секунду или почти 2,9 км / ч.
Уникальной способностью пьезоэлектрических двигателей является их способность работать в сильных магнитных полях. Это расширяет их полезность для приложений, которые не могут использовать традиционные электромагнитные двигатели, например, внутри ядерных магнитных резонансных антенн. Максимальная рабочая температура ограничена температурой Кюри используемой пьезокерамики и может превышать + 250 ° C.
Другие проекты
Одно действие
Очень простые одноступенчатые шаговые двигатели могут быть изготовлены из пьезоэлектрических кристаллов. Например, с жестким и жестким ротором-шпинделем, покрытым тонким слоем более мягкого материала (например, полиуретанового каучука), может быть установлена серия угловых пьезоэлектрических преобразователей. (см. рис.2). Когда цепь управления запускает одну группу преобразователей, они нажимают ротор на один шаг. Эта конструкция не может делать такие небольшие или точные шаги, как более сложные конструкции, но может достигать более высоких скоростей и дешевле в изготовлении.
Патенты
Первым патентом США на раскрытие вибрационно-управляемого двигателя может быть «Способ и устройство для подачи вибрационной энергии» (патент США № 3 184 842, Maropis, 1965). В патенте Маропи описывается «вибрационный аппарат, в котором продольные колебания в резонансном соединительном элементе преобразуются в крутильные колебания в резонансном концевом элементе тороида». Первые практические пьезомоторы были разработаны и изготовлены В. Лавриненко в Пьезоэлектронной лаборатории, с 1964 года, Киевский политехнический институт, СССР. Другие важные патенты в раннем развитии этой технологии включают:
«Электрический двигатель», В. Лавриненко, М. Некрасов, Патент СССР № 217509, приоритет от 10 мая 1965 года.
«Пьезоэлектрические моторные структуры» (патент США № 4,019,073, Вишневский и др., 1977)
«Пьезоэлектрический двигатель с крутильной вибрацией» (патент США № 4,210,837, Васильев и др., 1980)
Выгоды
Одним из самых важных преимуществ этих типов двигателей является то, что прямой привод возможен для любой скорости вращения. В конструктивном отношении привод значительно упрощается, и в некоторых случаях эффективность значительно увеличивается, что «съедает» коробку передач. Именно это свойство позволило разработать приводы шаровых кранов с любой зоной потока (рис.5) и их массовое производство.
С точки зрения скорости пьезоэлектрические двигатели не имеют равных. Это связано с тем, что их мощность не зависит от массы ротора, как это имеет место для электромагнитных двигателей. Для фракций миллисекунды они получают необходимую скорость и могут конкурировать даже с дорогими пьезоэлектрическими приводами, например, для топливных форсунок.
Минимальным шагом пьезомоторов может быть тысячная часть угловой секунды. На их основе создаются направляющие микроскопов, работающие в нанометровом диапазоне. Для низкоскоростных бытовых приборов из-за отсутствия коробки передач они бесшумны и не выделяют запах от обжигаемых обмоток, которых у них нет. Также полезны ингибирование ротора в отключенном состоянии, пластичность формы, способность интегрировать интегрально в продукт.
Пьезоэлектрические двигатели могут быть изготовлены полностью из немагнитных материалов. Некоторые из них могут работать в условиях высоких температур (до 300 градусов Цельсия), в вакууме, в сильных магнитных полях, в условиях высокой радиации, когда погружаются в воду или масло.
заявка
Ультразвуковой двигатель можно успешно использовать в тех областях техники, где необходимо достичь минимальных угловых и линейных перемещений. Например, в астрономии, в космических исследованиях, где требуется точная ориентация для очень маленьких объектов (звезд); в ускорителях заряженных частиц, где необходимо держать пучок в строго определенных геометрических координатах; в исследовании при изучении кристаллографической структуры (ориентация головки гониометра); в робототехнике и т. д.
На основе пьезоэлектрических двигателей были разработаны следующие устройства: приводы антенн и камер наблюдения, электробритвы, приводы режущих инструментов, механизмы ленточных накопителей, часы уличных часов, приводы шаровых кранов, приводы с низкой скоростью (2 об / мин) рекламных платформ, электрические дрели, приводы детских игрушек и мобильных протезов, потолочные вентиляторы, роботы и т. д.
Волновые пьезоэлектрические двигатели также используются в объективах для однообъективных зеркальных камер. Вариации названия технологии в таких объективах от разных производителей:
Canon — USM, UltraSonic Motor;
Minolta, Sony — SSM, SuperSonic Motor;
Nikon — SWM, бесшумный волновой двигатель;
Olympus — SWD, сверхзвуковой волновой привод;
Panasonic — XSM, Extra Silent Motor;
Pentax — SDM, сверхзвуковой приводной двигатель;
Sigma — HSM, Hyper Sonic Motor;
Tamron — USD, ультразвуковой бесшумный привод, PZD, привод Пьезо.
Samsung — SSA, Super Sonic Actuator;
В станкостроении эти двигатели используются для сверхточного позиционирования режущего инструмента.
Например, имеются специальные держатели для токарных станков с микроприводом.