Los polímeros electroactivos, o EAP, son polímeros que muestran un cambio en el tamaño o la forma cuando son estimulados por un campo eléctrico. Las aplicaciones más comunes de este tipo de material son los actuadores y sensores. Una propiedad característica típica de un EAP es que sufrirán una gran cantidad de deformación mientras sostienen grandes fuerzas.
La mayoría de los actuadores históricos están hechos de materiales piezoeléctricos de cerámica. Si bien estos materiales son capaces de soportar grandes fuerzas, comúnmente solo se deformarán una fracción del porcentaje. A fines de la década de 1990, se ha demostrado que algunos EAP pueden exhibir hasta un 380% de deformación, que es mucho más que cualquier otro actuador cerámico. Una de las aplicaciones más comunes para EAPs es en el campo de la robótica en el desarrollo de músculos artificiales; por lo tanto, un polímero electroactivo se refiere a menudo como un músculo artificial.
Historia
El campo de los EAP surgió en 1880, cuando Wilhelm Röntgen diseñó un experimento en el que probó el efecto de un campo electrostático en las propiedades mecánicas de una banda de caucho natural. La banda de goma se fijó en un extremo y se unió a una masa en el otro. Las cargas eléctricas se rociaron sobre el caucho, y se observó que la longitud cambiaba varios centímetros. MP Sacerdote siguió con el experimento de Roentgen formulando una teoría sobre la respuesta de la tensión a un campo eléctrico aplicado en 1899. Fue en 1925 cuando se descubrió el primer polímero piezoeléctrico (Electret). Electret se formó combinando cera de carnauba, colofonia y cera de abejas, y luego enfriando la solución mientras está sujeta a una polarización eléctrica de CC aplicada. La mezcla luego se solidificaría en un material polimérico que exhibió un efecto piezoeléctrico.
Los polímeros que responden a las condiciones ambientales, aparte de una corriente eléctrica aplicada, también han sido una gran parte de esta área de estudio. En 1949 Katchalsky et al. demostraron que cuando los filamentos de colágeno se sumergen en soluciones ácidas o alcalinas, responderían con un cambio en el volumen. Se encontró que los filamentos de colágeno se expandían en una solución ácida y se contraían en una solución alcalina. Aunque se han investigado otros estímulos (como el pH), debido a su facilidad y practicidad, la mayoría de las investigaciones se han dedicado al desarrollo de polímeros que responden a estímulos eléctricos para imitar los sistemas biológicos.
El siguiente gran avance en EAP se llevó a cabo a fines de los años sesenta. En 1969, Kawai demostró que el fluoruro de polivinilideno (PVDF) exhibe un gran efecto piezoeléctrico. Esto provocó un interés de investigación en el desarrollo de otros sistemas de polímeros que mostrarían un efecto similar. En 1977, Hideki Shirakawa et al. Descubrieron los primeros polímeros eléctricamente conductores. Shirakawa junto con Alan MacDiarmid y Alan Heeger demostraron que el poliacetileno era eléctricamente conductor y que al doparlo con vapor de yodo, podrían mejorar su conductividad en 8 órdenes de magnitud. Así, la conductancia era cercana a la de un metal. A finales de la década de 1980, se había demostrado que varios otros polímeros exhibían un efecto piezoeléctrico o se demostró que eran conductores.
A principios de la década de 1990, se desarrollaron compuestos de polímero iónico-metal (IPMC) y se demostró que exhibían propiedades electroactivas muy superiores a las EAP anteriores. La principal ventaja de los IPMC era que podían mostrar activación (deformación) a voltajes tan bajos como 1 o 2 voltios. Esto es órdenes de magnitud menos que cualquier EAP anterior. No solo la energía de activación de estos materiales era mucho menor, sino que también podían sufrir deformaciones mucho mayores. Se demostró que los IPMC exhibían una tensión de hasta 380%, órdenes de magnitud más grandes que los EAP desarrollados anteriormente.
En 1999, Yoseph Bar-Cohen propuso el Combate Armwrestling de EAP Robotic Arm Against Human Challenge. Este fue un desafío en el que grupos de investigación de todo el mundo compitieron para diseñar un brazo robótico formado por músculos de EAP que podrían derrotar a un humano en un combate de lucha de brazos. El primer desafío se llevó a cabo en la Conferencia de Dispositivos y Actuadores de Polímeros Electroactivos en 2005. Otro hito importante del campo es que el primer dispositivo desarrollado comercialmente que incluye EAP como músculo artificial fue producido en 2002 por Eamex en Japón. Este dispositivo era un pez que podía nadar solo, moviendo su cola con un músculo EAP. Pero el progreso en el desarrollo práctico no ha sido satisfactorio.
La investigación financiada por DARPA en la década de 1990 en SRI International y dirigida por Ron Pelrine desarrolló un polímero electroactivo que utiliza polímeros de silicona y acrílicos; La tecnología se escindió en la compañía Artificial Muscle en 2003, y la producción industrial comenzó en 2008. En 2010, Artificial Muscle se convirtió en una subsidiaria de Bayer MaterialScience.
Los tipos
EAP puede tener varias configuraciones, pero generalmente se dividen en dos clases principales: Dieléctrico e Iónico.
Dieléctrico
Los EAP dieléctricos son materiales en los cuales la acción es causada por fuerzas electrostáticas entre dos electrodos que aprietan el polímero. Los elastómeros dieléctricos son capaces de tensiones muy altas y son fundamentalmente un condensador que cambia su capacitancia cuando se aplica un voltaje al permitir que el polímero se comprima en espesor y se expanda en el área debido al campo eléctrico. Este tipo de EAP generalmente requiere un alto voltaje de activación para producir campos eléctricos altos (cientos a miles de voltios), pero un consumo eléctrico muy bajo. Los EAP dieléctricos no requieren energía para mantener el actuador en una posición determinada. Los ejemplos son polímeros electroestrictivos y elastómeros dieléctricos.
Polímeros ferroeléctricos
Los polímeros ferroeléctricos son un grupo de polímeros polares cristalinos que también son ferroeléctricos, lo que significa que mantienen una polarización eléctrica permanente que puede invertirse o conmutarse en un campo eléctrico externo. Los polímeros ferroeléctricos, como el fluoruro de polivinilideno (PVDF), se utilizan en transductores acústicos y actuadores electromecánicos debido a su respuesta piezoeléctrica inherente, y como sensores de calor debido a su respuesta piroeléctrica inherente.
Polímeros de injerto electroestrictivo
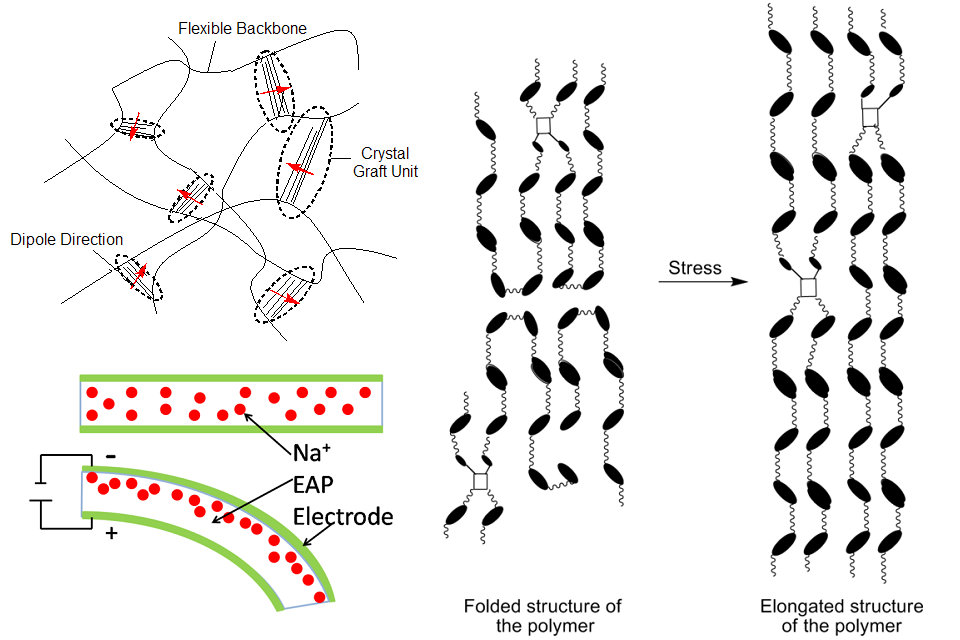
Los polímeros de injerto electroestrictivo consisten en cadenas principales flexibles con cadenas laterales ramificadas. Las cadenas laterales de los polímeros principales adyacentes se entrecruzan y forman unidades de cristal. La unidad principal y las unidades de cristal de la cadena lateral pueden formar monómeros polarizados, que contienen átomos con cargas parciales y generan momentos dipolares, como se muestra en la Figura 2. Cuando se aplica un campo eléctrico, se aplica una fuerza a cada carga parcial y causa la rotación de la totalidad. unidad de polímero. Esta rotación provoca deformación electroestrictiva y deformación del polímero.
Polímeros líquidos cristalinos
Los polímeros cristalinos líquidos de cadena principal tienen grupos mesogénicos unidos entre sí por un espaciador flexible. Los mesógenos dentro de un esqueleto forman la estructura mesofásica, lo que hace que el propio polímero adopte una conformación compatible con la estructura de la mesofase. El acoplamiento directo del orden cristalino líquido con la conformación del polímero ha dado gran interés a los elastómeros cristalinos líquidos de cadena principal. La síntesis de elastómeros altamente orientados lleva a tener una gran acción térmica de deformación a lo largo de la dirección de la cadena del polímero con una variación de temperatura que resulta en propiedades mecánicas únicas y aplicaciones potenciales como actuadores mecánicos.
Iónico
EAPs iónicos, en los cuales la acción es causada por el desplazamiento de iones dentro del polímero. Solo se necesitan unos pocos voltios para el accionamiento, pero el flujo iónico implica una mayor potencia eléctrica necesaria para el accionamiento, y se necesita energía para mantener el actuador en una posición determinada. Ejemplos de EAPS iónicos son polímeros conductores, compuestos de polímeros iónicos de metal (IPMC) y geles sensibles. Otro ejemplo más es un accionador de gel Bucky, que es una capa con soporte de polímero de material polielectrolito que consiste en un líquido iónico intercalado entre dos capas de electrodo que consiste en un gel de líquido iónico que contiene nanotubos de carbono de pared simple. El nombre proviene de la similitud del gel con el papel que se puede hacer al filtrar los nanotubos de carbono, el llamado buckypaper.
Fluido electrorreologico
Los fluidos electrorreológicos cambian la viscosidad de una solución con la aplicación de un campo eléctrico. El fluido es una suspensión de polímeros en un líquido de baja dieléctrica constante. Con la aplicación de un gran campo eléctrico aumenta la viscosidad de la suspensión. Las aplicaciones potenciales de estos fluidos incluyen amortiguadores, montajes de motor y amortiguadores acústicos.
Compuesto iónico de polímero-metal
Los compuestos iónicos de polímero y metal consisten en una delgada membrana ionomérica con electrodos de metal noble recubiertos en su superficie. También tiene cationes para equilibrar la carga de los aniones fijados a la columna vertebral del polímero. Son actuadores muy activos que muestran una deformación muy alta a bajo voltaje aplicado y muestran una baja impedancia. Los compuestos iónicos de polímero-metal funcionan a través de la atracción electrostática entre los contraiones catiónicos y el cátodo del campo eléctrico aplicado; en la Figura 3 se muestra una representación esquemática. Estos tipos de polímeros muestran la mayor promesa para usos bio-miméticos, ya que las fibras de colágeno son esencialmente Compuesto por polímeros iónicos con carga natural. Nafion y Flemion son compuestos metálicos de polímeros iónicos de uso común.
Geles sensibles al estímulo.
Los geles sensibles a los estímulos (hidrogeles, cuando el agente de hinchamiento es una solución acuosa) son un tipo especial de redes de polímeros hinchables con comportamiento de transición de fase de volumen. Estos materiales cambian de forma reversible su volumen, ópticas, mecánicas y otras propiedades por pequeñas alteraciones de ciertos estímulos físicos (por ejemplo, campo eléctrico, luz, temperatura) o químicos (concentraciones). El cambio de volumen de estos materiales se produce por hinchamiento / encogimiento y se basa en la difusión. Los geles proporcionan el mayor cambio en el volumen de materiales de estado sólido. Combinados con una excelente compatibilidad con las tecnologías de microfabricación, especialmente los hidrogeles que responden a estímulos son de gran interés para los microsistemas con sensores y actuadores. Los campos actuales de investigación y aplicación son sistemas de sensores químicos, microfluidos y sistemas de imágenes multimodales.
Comparación de EAPs dieléctricos e iónicos
Los polímeros dieléctricos son capaces de mantener su desplazamiento inducido mientras se activan bajo un voltaje de CC. Esto permite considerar polímeros dieléctricos para aplicaciones robóticas. Estos tipos de materiales también tienen una alta densidad de energía mecánica y pueden operarse en el aire sin una disminución importante en el rendimiento. Sin embargo, los polímeros dieléctricos requieren campos de activación muy altos (> 10 V / µm) que están cerca del nivel de descomposición.
La activación de polímeros iónicos, por otro lado, requiere solo 1-2 voltios. Sin embargo, deben mantener la humedad, aunque algunos polímeros se han desarrollado como activadores encapsulados autocontenidos que permiten su uso en ambientes secos. Los polímeros iónicos también tienen un bajo acoplamiento electromecánico. Sin embargo, son ideales para dispositivos bio-miméticos.
Caracterización
Si bien hay muchas maneras diferentes de caracterizar los polímeros electroactivos, aquí solo se abordarán tres: curva de tensión-deformación, análisis térmico mecánico dinámico y análisis térmico dieléctrico.
Curva tensión-tensión
Las curvas de tensión de tensión proporcionan información sobre las propiedades mecánicas del polímero, como la fragilidad, elasticidad y resistencia del polímero. Esto se hace proporcionando una fuerza al polímero a una velocidad uniforme y midiendo la deformación resultante. Un ejemplo de esta deformación se muestra en la Figura 4. Esta técnica es útil para determinar el tipo de material (frágil, resistente, etc.), pero es una técnica destructiva ya que el esfuerzo aumenta hasta que el polímero se fractura.
Análisis térmico dinámico mecánico (DMTA)
Ambos análisis mecánico dinámico son una técnica no destructiva que es útil para entender el mecanismo de deformación a nivel molecular. En DMTA se aplica una tensión sinusoidal al polímero y, en función de la deformación del polímero, se obtienen el módulo elástico y las características de amortiguamiento (suponiendo que el polímero sea un oscilador armónico amortiguado). Los materiales elásticos toman la energía mecánica de la tensión y la convierten en energía potencial que luego puede recuperarse. Un resorte ideal utilizará toda la energía potencial para recuperar su forma original (sin amortiguación), mientras que un líquido utilizará toda la energía potencial para fluir, sin volver nunca a su posición o forma original (alta amortiguación). Un polímero viscoelástico exhibirá una combinación de ambos tipos de comportamiento.
Análisis térmico dieléctrico (DETA)
DETA es similar a DMTA, pero en lugar de una fuerza mecánica alterna, se aplica un campo eléctrico alternativo. El campo aplicado puede llevar a la polarización de la muestra, y si el polímero contiene grupos que tienen dipolos permanentes (como en la Figura 2), se alinearán con el campo eléctrico. La permitividad puede medirse a partir del cambio de amplitud y resolverse en componentes de pérdida y almacenamiento dieléctrico. El campo de desplazamiento eléctrico también se puede medir siguiendo la corriente. Una vez que se retira el campo, los dipolos se relajarán hacia una orientación aleatoria.
Aplicaciones
Los materiales EAP se pueden fabricar fácilmente en varias formas debido a la facilidad de procesamiento de muchos materiales poliméricos, lo que los convierte en materiales muy versátiles. Una aplicación potencial para los EAP es que potencialmente pueden integrarse en sistemas microelectromecánicos (MEMS) para producir actuadores inteligentes.
Musculos artificiales
Como la dirección de investigación práctica más prospectiva, los EAP se han utilizado en músculos artificiales. Su capacidad para emular el funcionamiento de los músculos biológicos con una alta tenacidad a la fractura, una gran tensión de actuación y una amortiguación de vibración inherente llaman la atención de los científicos en este campo.
Pantallas táctiles
En los últimos años, han surgido «polímeros electroactivos para pantallas Braille actualizables» para ayudar a los discapacitados visuales en la lectura rápida y la comunicación asistida por computadora. Este concepto se basa en el uso de un actuador EAP configurado en forma de matriz. Filas de electrodos en un lado de una película EAP y columnas en el otro activan elementos individuales en la matriz. Cada elemento se monta con un punto Braille y se reduce al aplicar un voltaje a través del grosor del elemento seleccionado, lo que provoca una reducción local del grosor. Bajo el control informático, los puntos se activan para crear patrones táctiles de altas y bajas que representan la información a leer.
Las impresiones visuales y táctiles de una superficie virtual se muestran mediante una pantalla táctil de alta resolución, denominada «piel artificial» (Fig. 6). Estos dispositivos monolíticos consisten en una serie de miles de moduladores multimodales (píxeles del actuador) basados en hidrogeles que responden a estímulos. Cada modulador es capaz de cambiar individualmente su transmisión, altura y suavidad. Además de su posible uso como pantallas gráficas para personas con discapacidades visuales, tales pantallas son interesantes como teclas programables gratuitas de touchpads y consolas.
Microfluidos
Los materiales EAP tienen un gran potencial para la microfluídica, por ejemplo, como sistemas de administración de medicamentos, dispositivos microfluídicos y laboratorio en un chip. Una primera tecnología de plataforma microfluídica reportada en la literatura se basa en geles sensibles a estímulos. Para evitar la electrólisis, los dispositivos microfluídicos basados en hidrogel de agua se basan principalmente en polímeros sensibles a la temperatura con características de temperatura crítica más baja de la solución (LCST), que se controlan mediante una interfaz electrotérmica. Se conocen dos tipos de micropumpas, una micropump de difusión y una micropump de desplazamiento. Las microválvulas basadas en hidrogeles que responden a estímulos muestran algunas propiedades ventajosas, como la tolerancia a las partículas, la ausencia de fugas y una resistencia a la presión excepcional. Además de estos componentes estándar de microfluidos, la plataforma de hidrogel también proporciona sensores químicos y una nueva clase de componentes microfluídicos, los transistores químicos (también denominados válvulas de quimiostato). Estos dispositivos regulan un flujo de líquido si se alcanza un umbral de concentración de ciertos químicos. Los transistores químicos forman la base de los circuitos integrados fluídicos microquimomecánicos. Los «circuitos integrados químicos» procesan exclusivamente información química, funcionan con energía propia, funcionan automáticamente y pueden integrarse a gran escala.
Otra plataforma microfluídica está basada en materiales ionoméricos. Las bombas fabricadas con ese material podrían ofrecer una operación de bajo voltaje (batería), firma de ruido extremadamente bajo, alta eficiencia del sistema y un control altamente preciso del caudal.
Otra tecnología que puede beneficiarse de las propiedades únicas de los actuadores EAP son las membranas ópticas. Debido a su bajo módulo, la impedancia mecánica de los actuadores, se adaptan bien a los materiales comunes de membrana óptica. Además, un solo actuador EAP es capaz de generar desplazamientos que van desde micrómetros a centímetros. Por esta razón, estos materiales se pueden utilizar para la corrección estática de formas y la supresión de fluctuaciones. Estos actuadores también podrían usarse para corregir aberraciones ópticas debidas a la interferencia atmosférica.
Dado que estos materiales exhiben un excelente carácter electroactivo, los materiales de EAP muestran potencial en la investigación de biomiméticos-robot, sensores de estrés y campo de acústica, lo que hará que los EAP se conviertan en un tema de estudio más atractivo en un futuro próximo. Se han utilizado para varios actuadores, como los músculos faciales y los músculos de los brazos en robots humanoides.
Direcciones futuras
El campo de los EAP está lejos de ser maduro, lo que deja varios problemas en los que aún hay que trabajar. El rendimiento y la estabilidad a largo plazo del EAP se deben mejorar diseñando una superficie impermeable al agua. Esto evitará la evaporación del agua contenida en el EAP y también reducirá la pérdida potencial de los contraiones positivos cuando el EAP funciona sumergido en un ambiente acuoso. Se debe explorar la conductividad de la superficie mejorada utilizando métodos para producir una superficie conductora libre de defectos. Esto podría hacerse usando deposición de vapor metálico u otros métodos de dopaje. También puede ser posible utilizar polímeros conductores para formar una capa conductora gruesa. El EAP resistente al calor sería deseable para permitir la operación a voltajes más altos sin dañar la estructura interna del EAP debido a la generación de calor en el compuesto EAP. El desarrollo de EAP en diferentes configuraciones (por ejemplo, fibras y haces de fibras) también sería beneficioso para aumentar el rango de posibles modos de movimiento.