Polímeros eletroativos, ou EAPs, são polímeros que exibem uma mudança no tamanho ou forma quando estimulados por um campo elétrico. As aplicações mais comuns deste tipo de material são em atuadores e sensores. Uma propriedade característica típica de um EAP é que eles sofrerão uma grande quantidade de deformação enquanto sustentam grandes forças.
A maioria dos atuadores históricos são feitos de materiais piezoelétricos de cerâmica. Embora esses materiais sejam capazes de resistir a grandes forças, eles normalmente só deformam uma fração de um por cento. No final dos anos 90, foi demonstrado que alguns EAPs podem apresentar até 380% de tensão, o que é muito mais do que qualquer atuador de cerâmica. Uma das aplicações mais comuns para EAPs é no campo da robótica no desenvolvimento de músculos artificiais; Assim, um polímero eletroativo é muitas vezes referido como um músculo artificial.
História
O campo dos EAPs surgiu em 1880, quando Wilhelm Röntgen projetou um experimento no qual testou o efeito de um campo eletrostático nas propriedades mecânicas de uma faixa de borracha natural. A faixa de borracha foi fixada em uma extremidade e presa a uma massa na outra. As cargas elétricas foram então borrifadas na borracha, e foi observado que o comprimento mudou em vários centímetros. MP Sacerdote seguiu o experimento de Roentgen formulando uma teoria sobre resposta de deformação a um campo elétrico aplicado em 1899. Foi em 1925 que o primeiro polímero piezoelétrico foi descoberto (Electret). O eletreto foi formado pela combinação de cera de carnaúba, colofónia e cera de abelha e, em seguida, o resfriamento da solução, enquanto ele está sujeito a uma polarização elétrica DC aplicada. A mistura então solidificaria em um material polimérico que exibia um efeito piezoelétrico.
Polímeros que respondem a condições ambientais, além de uma corrente elétrica aplicada, também têm sido uma grande parte desta área de estudo. Em 1949, Katchalsky et al. demonstraram que quando os filamentos de colágeno são imersos em soluções ácidas ou alcalinas, eles respondem com uma mudança no volume. Os filamentos de colágeno se expandiram em uma solução ácida e se contraíram em uma solução alcalina. Embora outros estímulos (como o pH) tenham sido investigados, devido à sua facilidade e praticidade, a maioria das pesquisas tem se dedicado ao desenvolvimento de polímeros que respondem a estímulos elétricos para imitar os sistemas biológicos.
O próximo grande avanço em EAPs ocorreu no final da década de 1960. Em 1969, Kawai demonstrou que o fluoreto de polivinilideno (PVDF) exibe um grande efeito piezelétrico. Isso despertou interesse de pesquisa no desenvolvimento de outros sistemas de polímeros que mostrariam um efeito similar. Em 1977, os primeiros polímeros eletricamente condutores foram descobertos por Hideki Shirakawa et al. Shirakawa, juntamente com Alan MacDiarmid e Alan Heeger, demonstrou que o poliacetileno era eletricamente condutor e que, ao impregná-lo com vapor de iodo, eles poderiam aumentar sua condutividade em 8 ordens de grandeza. Assim, a condutância estava próxima da de um metal. No final da década de 1980, vários outros polímeros demonstraram ter um efeito piezelétrico ou demonstraram ser condutores.
No início da década de 1990, foram desenvolvidos compósitos iônicos de metal-polímero (IPMCs) que demonstraram exibir propriedades eletroativas muito superiores às EAPs anteriores. A principal vantagem dos IPMCs foi que eles foram capazes de mostrar a ativação (deformação) em tensões tão baixas quanto 1 ou 2 volts. Isto é ordens de magnitude menor que qualquer EAP anterior. Não apenas a energia de ativação desses materiais era muito menor, mas eles também podiam sofrer deformações muito maiores. Mostrou-se que os IPMCs exibem em qualquer lugar até 380% de tensão, ordens de grandeza maiores do que as EAPs anteriormente desenvolvidas.
Em 1999, Yoseph Bar-Cohen propôs o Armwrestling Match do EAP Robotic Arm Against Human Challenge. Este foi um desafio no qual grupos de pesquisa ao redor do mundo competiram para projetar um braço robótico composto de músculos EAP que poderiam derrotar um humano em uma luta de braço. O primeiro desafio foi realizado na Conferência de Atuadores e Dispositivos de Polímeros Eletroativos em 2005. Outro marco importante do campo é que o primeiro dispositivo desenvolvido comercialmente incluindo EAPs como um músculo artificial foi produzido em 2002 pela Eamex no Japão. Este dispositivo era um peixe que era capaz de nadar sozinho, movendo sua cauda usando um músculo EAP. Mas o progresso no desenvolvimento prático não foi satisfatório.
A pesquisa financiada pela DARPA nos anos 90 na SRI International e liderada por Ron Pelrine desenvolveu um polímero eletroativo usando polímeros de silicone e acrílicos; a tecnologia foi desmembrada na empresa Artificial Muscle em 2003, com a produção industrial iniciada em 2008. Em 2010, a Artificial Muscle se tornou uma subsidiária da Bayer MaterialScience.
Tipos
O EAP pode ter várias configurações, mas geralmente é dividido em duas classes principais: Dielétrico e Iônico.
Dielétrico
EAPs dielétricos são materiais nos quais a atuação é causada por forças eletrostáticas entre dois eletrodos que comprimem o polímero. Os elastômeros dielétricos são capazes de tensões muito altas e são fundamentalmente um capacitor que muda sua capacitância quando uma tensão é aplicada, permitindo que o polímero se comprima em espessura e se expanda em área devido ao campo elétrico. Esse tipo de EAP normalmente requer uma grande tensão de atuação para produzir campos elétricos altos (centenas a milhares de volts), mas um consumo de energia elétrica muito baixo. Os EAPs dielétricos não necessitam de energia para manter o atuador em uma determinada posição. Exemplos são polímeros eletroestritivos e elastômeros dielétricos.
Polímeros ferroelétricos
Polímeros ferroelétricos são um grupo de polímeros polares cristalinos que também são ferroelétricos, o que significa que eles mantêm uma polarização elétrica permanente que pode ser invertida, ou trocada, em um campo elétrico externo. Polímeros ferroelétricos, como fluoreto de polivinilideno (PVDF), são usados em transdutores acústicos e atuadores eletromecânicos por causa de sua resposta piezoelétrica inerente, e como sensores de calor por causa de sua resposta piroelétrica inerente.
Polímeros de enxerto eletrostritivos
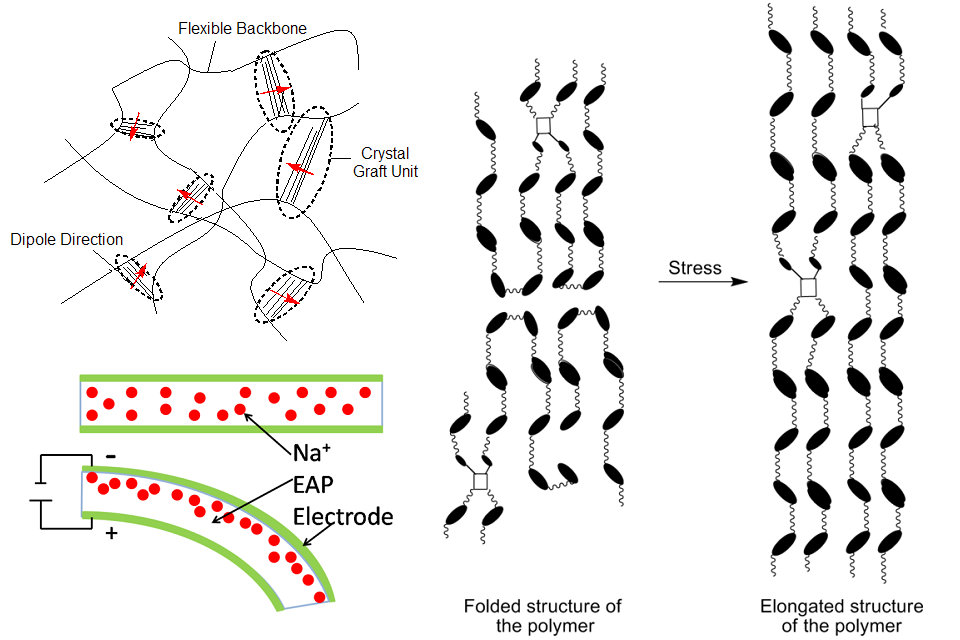
Os polímeros eletro-enxertais de enxerto consistem em cadeias espinhais flexíveis com cadeias laterais ramificadas. As cadeias laterais nos polímeros de backbone vizinhos cruzam e formam unidades de cristal. O backbone e as unidades de cristal da cadeia lateral podem então formar monômeros polarizados, que contêm átomos com cargas parciais e geram momentos de dipolo, mostrados na Figura 2. Quando um campo elétrico é aplicado, uma força é aplicada a cada carga parcial e causa a rotação de todo unidade de polímero. Esta rotação causa tensão eletroestritiva e deformação do polímero.
Polímeros líquidos cristalinos
Os polímeros líquidos cristalinos de cadeia principal têm grupos mesogênicos ligados um ao outro por um espaçador flexível. Os mesogênios dentro de um esqueleto formam a estrutura da mesofase, fazendo com que o próprio polímero adote uma conformação compatível com a estrutura da mesofase. O acoplamento directo da ordem líquido-cristalina com a conformação do polímero deu uma grande quantidade de interesse aos elastómeros líquidos cristalinos de cadeia principal. A síntese de elastômeros altamente orientados leva a uma atuação térmica de grande tensão ao longo da direção da cadeia polimérica com variação de temperatura, resultando em propriedades mecânicas únicas e potenciais aplicações como atuadores mecânicos.
Iônico
EAPs iônicos, nos quais a atuação é causada pelo deslocamento de íons dentro do polímero. Apenas alguns volts são necessários para a atuação, mas o fluxo iônico implica uma maior energia elétrica necessária para a atuação, e energia é necessária para manter o atuador em uma determinada posição. Exemplos de EAPS iônicos são polímeros condutores, compósitos iônicos de metal-polímero (IPMCs) e géis responsivos. Ainda outro exemplo é um actuador de gel Bucky, que é uma camada de material polielectrolitico suportado por polímero consistindo num líquido iónico imprensado entre duas camadas de eléctrodo consistindo num gel de líquido iónico contendo nanotubos de carbono de parede única. O nome vem da similaridade do gel com o papel que pode ser produzido através da filtragem de nanotubos de carbono, o chamado buckypaper.
Fluido eletrorrecologico
Os fluidos eletroreológicos alteram a viscosidade de uma solução com a aplicação de um campo elétrico. O fluido é uma suspensão de polímeros em um líquido com constante dielétrica baixa. Com a aplicação de um grande campo elétrico, a viscosidade da suspensão aumenta. As aplicações potenciais desses fluidos incluem amortecedores, suportes do motor e amortecedores acústicos.
Compósito polímero-metal iônico
Os compósitos iônicos de metal-polímero consistem de uma fina membrana ionomérica com eletrodos de metal nobre na sua superfície. Ele também tem cátions para equilibrar a carga dos ânions fixados ao backbone do polímero. Eles são atuadores muito ativos que mostram deformação muito alta em baixa tensão aplicada e mostram baixa impedância. Os compósitos iônicos de polímeros metálicos funcionam através da atração eletrostática entre os contra-íons catiônicos e o cátodo do campo elétrico aplicado, uma representação esquemática é mostrada na Figura 3. Esses tipos de polímeros mostram a maior promessa para usos biomiméticos, pois as fibras de colágeno são essencialmente composto de polímeros iônicos carregados naturais. Nafion e Flemion são compostos de metal polímero iônico comumente usados.
Géis responsivos a estímulos
Os géis que respondem aos estímulos (hidrogéis, quando o agente de intumescimento é uma solução aquosa) são um tipo especial de redes de polímeros dilatáveis com comportamento de transição de fase volumétrica. Esses materiais alteram reversivelmente seu volume, propriedades ópticas, mecânicas e outras por pequenas alterações de certos estímulos físicos (por exemplo, campo elétrico, luz, temperatura) ou químicos (concentrações). A alteração de volume destes materiais ocorre por inchamento / encolhimento e é baseada em difusão. Géis fornecem a maior mudança no volume de materiais de estado sólido. Combinado com uma excelente compatibilidade com tecnologias de microfabricação, especialmente os hidrogéis sensíveis a estímulos são de crescente interesse para microsistemas com sensores e atuadores. Os campos atuais de pesquisa e aplicação são sistemas de sensores químicos, microfluídicos e sistemas de imagens multimodais.
Comparação de EAPs dielétricos e iônicos
Polímeros dielétricos são capazes de manter seu deslocamento induzido enquanto ativados sob uma tensão CC. Isso permite que polímeros dielétricos sejam considerados para aplicações robóticas. Esses tipos de materiais também têm alta densidade de energia mecânica e podem ser operados no ar sem uma redução significativa no desempenho. Entretanto, os polímeros dielétricos requerem campos de ativação muito altos (> 10 V / µm) que estão próximos do nível de decomposição.
A ativação de polímeros iônicos, por outro lado, requer apenas 1-2 volts. Eles, no entanto, precisam manter a umidade, embora alguns polímeros tenham sido desenvolvidos como ativadores encapsulados autônomos que permitem seu uso em ambientes secos. Polímeros iônicos também possuem um baixo acoplamento eletromecânico. Eles são, no entanto, ideais para dispositivos biomiméticos.
Caracterização
Embora existam muitas maneiras diferentes de caracterizar polímeros eletroativos, apenas três serão abordados aqui: curva tensão-deformação, análise térmica mecânica dinâmica e análise térmica dielétrica.
Curva de tensão-deformação
Curvas de tensão de tensão fornecem informações sobre as propriedades mecânicas do polímero, como a fragilidade, a elasticidade e a resistência ao escoamento do polímero. Isso é feito fornecendo uma força ao polímero a uma taxa uniforme e medindo a deformação resultante. Um exemplo dessa deformação é mostrado na Figura 4. Essa técnica é útil para determinar o tipo de material (quebradiço, resistente, etc.), mas é uma técnica destrutiva à medida que a tensão é aumentada até o polímero se romper.
Análise térmica mecânica dinâmica (DMTA)
Tanto a análise mecânica dinâmica é uma técnica não destrutiva que é útil para compreender o mecanismo de deformação a nível molecular. Na DMTA uma tensão sinusoidal é aplicada ao polímero, e com base na deformação do polímero, o módulo de elasticidade e as características de amortecimento são obtidas (assumindo que o polímero é um oscilador harmônico amortecido). Os materiais elásticos absorvem a energia mecânica do estresse e convertem-na em energia potencial, que pode ser recuperada posteriormente. Uma mola ideal usará toda a energia potencial para recuperar sua forma original (sem amortecimento), enquanto um líquido usará toda a energia potencial para fluir, nunca retornando à sua posição ou forma original (alto amortecimento). Um polímero viscoelestérico exibirá uma combinação dos dois tipos de comportamento.
Análise térmica dielétrica (DETA)
DETA é semelhante ao DMTA, mas em vez de uma força mecânica alternada, é aplicado um campo elétrico alternado. O campo aplicado pode levar à polarização da amostra, e se o polímero contiver grupos que tenham dipolos permanentes (como na Figura 2), eles serão alinhados com o campo elétrico. A permissividade pode ser medida a partir da mudança na amplitude e resolvida em componentes dielétricos de armazenamento e perda. O campo de deslocamento elétrico também pode ser medido seguindo a corrente. Uma vez que o campo é removido, os dipolos relaxarão novamente em uma orientação aleatória.
Aplicações
Os materiais EAP podem ser facilmente fabricados em várias formas devido à facilidade de processamento de muitos materiais poliméricos, tornando-os materiais muito versáteis. Uma aplicação potencial para os EAPs é que eles podem ser potencialmente integrados em sistemas microeletromecânicos (MEMS) para produzir atuadores inteligentes.
Músculos artificiais
Como a direção de pesquisa prática mais prospectiva, os EAPs foram usados em músculos artificiais. Sua capacidade de imitar a operação de músculos biológicos com alta tenacidade à fratura, grande tensão de atuação e amortecimento de vibração inerente chama a atenção dos cientistas neste campo.
Visores táteis
Nos últimos anos, “polímeros eletroativos para displays em braile atualizáveis” surgiram para ajudar deficientes visuais em leitura rápida e comunicação assistida por computador. Este conceito é baseado no uso de um atuador EAP configurado em um formulário de matriz. Linhas de eletrodos de um lado de um filme EAP e colunas do outro ativam elementos individuais no array. Cada elemento é montado com um ponto Braille e é reduzido aplicando-se uma voltagem através da espessura do elemento selecionado, causando redução da espessura local. Sob o controle do computador, os pontos seriam ativados para criar padrões táteis de altos e baixos representando as informações a serem lidas.
Impressões visuais e táteis de uma superfície virtual são exibidas por uma tela tátil de alta resolução, a chamada “pele artificial” (Fig.6). Esses dispositivos monolíticos consistem em uma matriz de milhares de moduladores multimodais (pixels de atuadores) baseados em hidrogéis responsivos a estímulos. Cada modulador é capaz de alterar individualmente sua transmissão, altura e suavidade. Além de seu possível uso como displays gráficos para deficientes visuais, estes displays são interessantes como teclas programáveis livres de touchpads e consoles.
Microfluídica
Os materiais EAP têm um enorme potencial para microfluídica, por exemplo, como sistemas de entrega de medicamentos, dispositivos microfluídicos e laboratório-em-um-chip. Uma primeira tecnologia de plataforma microfluídica relatada na literatura é baseada em géis sensíveis a estímulos. Para evitar a eletrólise de dispositivos microfluídicos à base de hidrogéis de água são baseados principalmente em polímeros sensíveis à temperatura com características de temperatura de solução crítica (LCST) mais baixas, que são controladas por uma interface eletrotérmica. Dois tipos de microbombas são conhecidas, uma microbombola de difusão e uma micro bomba de deslocamento. Microválvulas baseadas em hidrogéis responsivos a estímulos mostram algumas propriedades vantajosas, como tolerância a partículas, ausência de vazamentos e excelente resistência à pressão. Além desses componentes padrão microfluídicos, a plataforma de hidrogel também fornece sensores químicos e uma nova classe de componentes microfluídicos, os transistores químicos (também referidos como válvulas quimiostáticas). Estes dispositivos regulam um fluxo de líquido se uma concentração limiar de determinada substância química for atingida. Transistores químicos formam a base de circuitos integrados fluídicos microchemomecânicos. Os “CIs Químicos” processam exclusivamente informações químicas, são auto-alimentados por energia, operam automaticamente e são capazes de integração em grande escala.
Outra plataforma microfluídica é baseada em materiais ionoméricos. As bombas feitas com esse material podem oferecer operação de baixa tensão (bateria), assinatura de ruído extremamente baixa, alta eficiência do sistema e controle altamente preciso da vazão.
Outra tecnologia que pode se beneficiar das propriedades exclusivas dos atuadores EAP são as membranas ópticas. Devido ao seu baixo módulo, a impedância mecânica dos atuadores, eles são bem compatíveis com materiais de membrana ótica comuns. Além disso, um único atuador EAP é capaz de gerar deslocamentos que variam de micrômetros a centímetros. Por esse motivo, esses materiais podem ser usados para correção de forma estática e supressão de tremulação. Esses atuadores também podem ser usados para corrigir aberrações ópticas devido à interferência atmosférica.
Como esses materiais exibem um excelente caráter eletroativo, os materiais EAP mostram potencial na pesquisa de robôs biomiméticos, sensores de estresse e campo acústico, o que fará com que os EAPs se tornem um tópico de estudo mais atraente no futuro próximo. Eles têm sido usados por vários atuadores, como músculos faciais e músculos do braço em robôs humanóides.
Direções futuras
O campo de EAPs está longe de ser maduro, o que deixa várias questões que ainda precisam ser trabalhadas. O desempenho e a estabilidade a longo prazo do EAP devem ser melhorados projetando uma superfície impermeável à água. Isso evitará a evaporação da água contida no EAP e também reduzirá a perda potencial dos contra-íons positivos quando o EAP estiver operando submerso em um ambiente aquoso. A melhor condutividade da superfície deve ser explorada usando métodos para produzir uma superfície condutora livre de defeitos. Isso poderia ser feito usando deposição de vapor de metal ou outros métodos de dopagem. Pode também ser possível utilizar polímeros condutores para formar uma camada condutora espessa. EAP resistente ao calor seria desejável para permitir a operação em voltagens mais altas sem danificar a estrutura interna do EAP devido à geração de calor no composto EAP. O desenvolvimento de EAPs em diferentes configurações (por exemplo, fibras e feixes de fibras) também seria benéfico, a fim de aumentar a gama de modos possíveis de movimento.