電気活性ポリマーまたはEAPは、電場によって刺激されたときにサイズまたは形状の変化を示すポリマーである。 このタイプの材料の最も一般的な用途は、アクチュエータおよびセンサにあります。 EAPの典型的な特徴は、大きな力を維持しながら大きな変形量を受けることである。
歴史的なアクチュエータの大部分は、セラミック圧電材料でできています。 これらの材料は大きな力に耐えることができますが、一般的にわずか1%しか変形しません。 1990年代後半には、いくつかのEAPが、セラミックアクチュエータよりもはるかに多くの380%の歪みを発揮することが示されています。 EAPの最も一般的なアプリケーションの1つは、人工筋肉の開発におけるロボット工学の分野です。 従って、電気活性ポリマーはしばしば人工筋肉と呼ばれる。
歴史
WilhelmRöntgenが静磁界の影響を天然ゴムのストライプの機械的特性に及ぼす実験を設計した1880年に、EAPの分野が浮上しました。 ゴムストライプは一方の端部に固定され、他方の端部にはマスに取り付けられた。 次いでゴムに電荷を噴霧し、長さが数センチ変化していることが観察された。 MP Sacerdoteは、1899年に印加された電場に対する歪応答に関する理論を定式化することによって、レントゲンの実験を追跡した。1925年に、最初の圧電ポリマーが発見された(エレクトレット)。 エレクトレットは、カルナウバワックス、ロジンおよび蜜ろうを混合し、次いで適用されたDC電気バイアスを受ける間に溶液を冷却することによって形成された。 次いで、混合物は、圧電効果を示すポリマー材料に固化する。
印加された電流以外の環境条件に応答するポリマーも、この研究分野の大きな部分を占めています。 1949年、Katchalsky et al。 コラーゲンフィラメントを酸溶液またはアルカリ溶液に浸漬すると、それらは体積の変化に応答することが示された。 コラーゲンフィラメントは、酸性溶液中で膨張し、アルカリ溶液中で収縮することが見出された。 そのような容易さおよび実用性のために、他の刺激(pHなど)が研究されているが、生物学的システムを模倣するために電気刺激に応答するポリマーを開発するための研究が殆どである。
EAPにおける次の大きな進展は1960年代後半に起こりました。 1969年、Kawaiは、ポリフッ化ビニリデン(PVDF)が大きな圧電効果を示すことを実証した。 このことは、同様の効果を示す他のポリマー系を開発する研究に関心を喚起した。 1977年、最初の導電性ポリマーは、Hideki Shirakawa et al。 白川はAlan MacDiarmidとAlan Heegerと共に、ポリアセチレンは導電性であり、ヨウ素蒸気をドーピングすることによって導電率を8桁向上させることができたことを実証した。 したがって、コンダクタンスは金属のコンダクタンスに近かった。 1980年代後半までに、多くの他のポリマーが圧電効果を示すことが示されていたか、または導電性であることが実証されていた。
1990年代初頭、イオン性ポリマー – 金属複合材(IPMC)が開発され、従来のEAPよりはるかに優れた電気活性特性を示すことが示された。 IPMCの主な利点は、1〜2ボルトの低電圧で起動(変形)することができたことです。 これは、以前のどのEAPよりも桁違いのオーダーです。 これらの材料の活性化エネルギーははるかに低いだけでなく、より大きな変形を受ける可能性もあります。 IPMCは、以前に開発されたEAPよりも桁違いに大きい380%の歪みのどこにでも出現することが示された。
1999年、Yoseph Bar-Cohenは、Human Challengeに対するEAPロボットアームのArmstrong Matchを提案しました。 これは、世界中の研究グループが、腕のレスリングマッチで人間を倒すことができるEAP筋肉からなるロボットアームを設計するために競争した挑戦でした。 2005年にElectroactive Polymer Actuators and Devices Conferenceで開催されました。この分野のもう一つの大きなマイルストーンは、EAPを人工筋肉として最初に商業開発したデバイスが2002年にEamexによって日本で製造されたことです。 この装置は、泳ぐことができた魚で、EAP筋肉を使って尾を動かしました。 しかし、現実の発展の進歩は満足のいくものではありません。
1990年代にSRIインターナショナルでDARPAが資金を提供し、Ron Pelrineが率いる研究は、シリコーンとアクリルポリマーを用いた電気活性ポリマーを開発しました。 この技術は2003年にArtificial Muscle社に派遣され、2008年に工業生産が開始されました。2010年にArtificial Muscle社はバイエルマテリアルサイエンスの子会社となりました。
タイプ
EAPはいくつかの構成を持つことができますが、一般に誘電体とイオンの2つの主要なクラスに分けられます。
誘電
誘電体EAPは、ポリマーを圧迫する2つの電極間の静電力によって作動が引き起こされる材料である。 誘電エラストマーは、非常に高い歪みが可能であり、基本的には、ポリマーが厚さを圧縮し、電界によって面積が拡大することによって、電圧が印加されるとその容量を変化させるコンデンサである。 このタイプのEAPは、典型的には、高電界(数百〜数千ボルト)を生成するために大きな作動電圧を必要とするが、消費電力は非常に低い。 誘電体EAPは、アクチュエータを所与の位置に保つための電力を必要としない。 例は、電歪ポリマーおよび誘電性エラストマーである。
強誘電性ポリマー
強誘電性ポリマーは、強誘電性でもある結晶性極性ポリマーのグループであり、外部電界中で反転させるか、またはスイッチすることができる永久電気分極を維持することを意味する。 PVDF(ポリフッ化ビニリデン)などの強誘電性ポリマーは、固有の圧電応答のために音響トランスデューサおよび電気機械アクチュエータに使用され、固有の焦電応答のために熱センサとして使用されます。
電歪グラフトポリマー
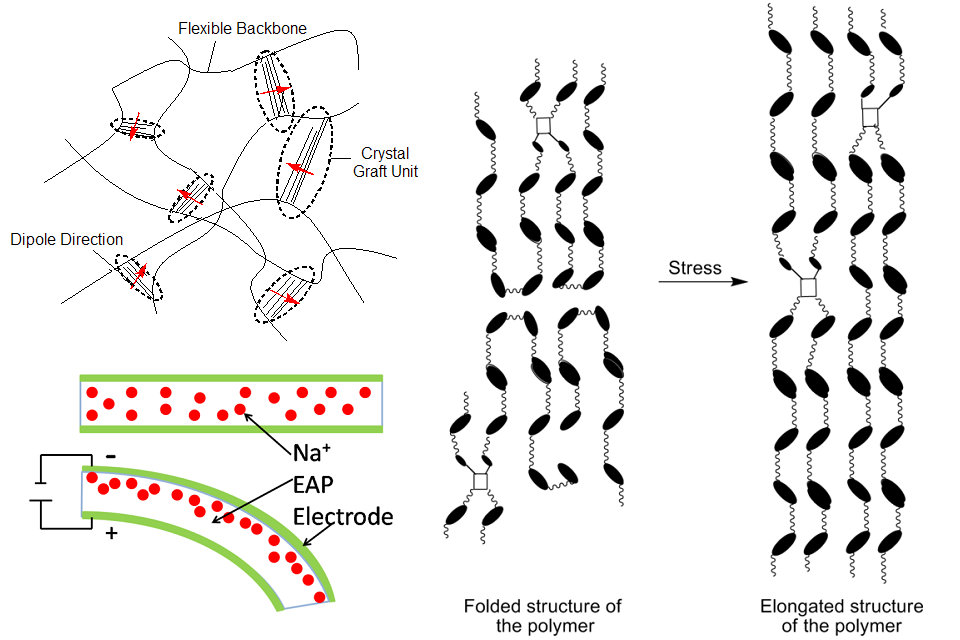
電歪グラフトポリマーは、分枝側鎖を有する柔軟な主鎖からなる。 隣接する主鎖ポリマー上の側鎖は架橋して結晶単位を形成する。 次に、主鎖および側鎖結晶単位は、図2に示すように、部分電荷を有する原子を含み、双極子モーメントを生成する偏光モノマーを形成することができる。電場が印加されると、各部分電荷に力が加えられ、ポリマー単位。 この回転は、電歪歪みおよびポリマーの変形を引き起こす。
液晶ポリマー
主鎖液晶ポリマーは、可撓性スペーサーによって互いに連結されたメソゲン基を有する。 骨格内のメソゲンは、メソフェーズ構造を形成し、ポリマー自体がメソフェーズの構造と適合するコンフォメーションをとるようにする。 液晶配列とポリマー立体配座との直接的な結合は、主鎖の液晶エラストマーに大きな関心を与えている。 高度に配向されたエラストマーの合成は、固有の機械的性質および機械的アクチュエータとしての潜在的な用途をもたらす温度変化に伴うポリマー鎖方向に沿った大きな歪み熱作動をもたらす。
イオニック
イオン化EAPは、ポリマー内のイオンの移動によって作動が引き起こされる。 作動にはほんの数ボルトしか必要ではないが、イオン流は作動に必要なより高い電力を意味し、アクチュエータを所与の位置に保つためにはエネルギーが必要である。 イオン性EAPSの例は、導電性ポリマー、イオン性ポリマー – 金属複合材(IPMC)、および応答性ゲルである。 さらに別の例は、単層カーボンナノチューブを含むイオン性液体のゲルからなる2つの電極層の間に挟まれたイオン性液体からなる高分子電解質材料のポリマー支持層であるBuckyゲルアクチュエータである。 この名前は、カーボンナノチューブをろ過することによって作られたゲルと紙との類似性、いわゆるバックタイピングから来ている。
電気粘性流体
電気流動学的流体は、電場の印加によって溶液の粘度を変化させる。 流体は、低誘電率液体中のポリマーの懸濁液である。 大きな電界を印加すると、懸濁液の粘度が増加する。 これらの流体の潜在的な用途には、ショックアブソーバ、エンジンマウントおよびアコースティックダンパーが含まれる。
イオン性ポリマー – 金属複合材
イオン性ポリマー – 金属複合材料は、その表面にめっきされた貴金属電極を有する薄いアイオノマー膜からなる。 また、ポリマー骨格に固定されたアニオンの電荷のバランスをとるためのカチオンも有する。 それらは、低い印加電圧で非常に高い変形を示し、低インピーダンスを示す非常にアクティブなアクチュエータである。 イオン性ポリマー – 金属複合体は、カチオン性対イオンと印加電場の陰極との間の静電引力によって作用するが、模式的な表現は図3に示されている。これらのタイプのポリマーは、コラーゲン繊維が本質的に生体模倣用途天然荷電イオン性ポリマーからなる。 ナフィオン(Nafion)およびフレミオン(Flemion)は、一般にイオンポリマー金属複合材として使用される。
刺激応答性ゲル
刺激応答性ゲル(膨潤剤が水溶液である場合、ヒドロゲル)は、体積相転移挙動を有する特殊な種類の膨潤性ポリマーネットワークである。 これらの物質は、特定の物理的(例えば電場、光、温度)または化学(濃度)刺激の非常に小さな変化によって、それらの容積、光学的、機械的および他の特性を可逆的に変化させる。 これらの材料の体積変化は、膨潤/収縮によって起こり、拡散に基づく。 ゲルは、固体材料の体積の最大変化をもたらす。 マイクロ製造技術との優れた適合性と組み合わせると、特に、刺激応答性ヒドロゲルは、センサおよびアクチュエータを有するマイクロシステムにとってますます関心が高まっている。 現在の研究および応用分野は、化学センサシステム、マイクロ流体およびマルチモーダルイメージングシステムである。
誘電体とイオンのEAPの比較
誘電性ポリマーは、DC電圧下で活性化されている間に誘導変位を保持することができる。 これにより、誘電性ポリマーをロボット用途に考慮することが可能になる。 これらのタイプの材料はまた、高い機械的エネルギー密度を有し、性能を大幅に低下させることなく空気中で操作することができる。 しかしながら、誘電体ポリマーは、破壊レベルに近い非常に高い活性化フィールド(> 10V /μm)を必要とする。
一方、イオン性ポリマーの活性化は、わずか1〜2ボルトを必要とする。 しかしながら、それらは乾燥した環境での使用を可能にする自己封入封入活性剤として開発されているポリマーもあるが、湿潤性を維持する必要がある。 イオン性ポリマーはまた、低い電気機械結合を有する。 しかしながら、それらは生物模倣装置に理想的である。
特徴付け
電気活性ポリマーを特徴付けることができる多くの異なる方法があるが、ここでは応力 – 歪み曲線、動的機械的熱分析、および誘電体熱分析の3つしか扱われない。
応力 – 歪み曲線
応力歪み曲線は、ポリマーの脆性、弾性および降伏強度などのポリマーの機械的特性に関する情報を提供する。 これは、均一な速度でポリマーに力を与え、その結果生じる変形を測定することによって行われる。 この手法の例を図4に示します。この手法は材料の種類(脆性、靭性など)を判断するのに役立ちますが、ポリマーが破砕するまで応力が増加するため破壊的な手法です。
動的機械熱分析(DMTA)
両方の動的機械分析は、分子レベルでの変形のメカニズムを理解するのに有用な非破壊技術である。 DMTAでは、正弦波状の応力がポリマーに加えられ、ポリマーの変形に基づいて、弾性率および減衰特性が得られる(ポリマーが減衰された高調波発振器であると仮定して)。 弾性材料は、応力の機械的エネルギーを取り、それを後で回収することができる位置エネルギーに変換する。 理想的な春は、液体がすべての潜在エネルギーを流れ、元の位置または形状に戻ることは決してありませんが(高減衰)、元の形状(減衰なし)を取り戻すためにすべての潜在エネルギーを使用します。 粘弾性ポリマーは、両方のタイプの挙動の組合せを示す。
誘電体熱分析(DETA)
DETAはDMTAに類似しているが、交互の機械的力の代わりに交番電界が印加される。 印加電界は試料の分極を引き起こす可能性があり、ポリマーが永久双極子を有する基を含む場合(図2)、それらは電界と整列する。 誘電率は、振幅の変化から測定され、誘電体記憶および損失成分に分解される。 電気変位場は、電流に追従して測定することもできる。 磁場が除去されると、双極子はランダムな向きに戻る。
アプリケーション
EAP材料は、多くのポリマー材料の加工が容易であり、非常に汎用性のある材料となるため、様々な形状に容易に製造することができる。 EAPの潜在的な用途の1つは、潜在的にスマートアクチュエータを製造するために微小電気機械システム(MEMS)に統合できることである。
人工筋肉
実用的な研究方向として最も有望なものとして、EAPは人工筋肉に使用されてきた。 高い破壊靭性、大きな作動ひずみ、固有の振動減衰を伴う生物学的筋肉の動作をエミュレートする彼らの能力は、この分野の科学者の注目を集めている。
触覚ディスプレイ
近年、高速読みとりおよびコンピュータ支援通信において視覚障害者を支援するために、「リフレッシュ可能な点字ディスプレイ用の電気活性ポリマー」が出現している。 この概念は、アレイ形態で構成されたEAPアクチュエータを使用することに基づいている。 EAPフィルムの一方の電極の列と他方の列の列は、アレイ内の個々の要素を作動させる。 各要素は点字の点で取り付けられ、選択された要素の厚さに電圧を印加することによって下げられ、局所的な厚さの減少を引き起こす。 コンピュータ制御の下では、ドットを活性化して、読み取る情報を表す高低の触覚パターンを作成する。
仮想表面の視覚的および触覚的印象は、高解像度触覚ディスプレイ、いわゆる「人工皮膚」によって表示される(図6)。 これらのモノリシックデバイスは、刺激応答性ヒドロゲルに基づく数千のマルチモーダル変調器(アクチュエータピクセル)からなる。 各モジュレータは、送信、高さ、および柔らかさを個別に変更することができます。 視覚障害のためのグラフィックディスプレイとしてのそれらの可能な使用に加えて、そのようなディスプレイは、タッチパッドおよびコンソールの自由にプログラム可能なキーとして興味深い。
マイクロフルイディクス
EAP材料は、例えば薬物送達システム、マイクロ流体デバイスおよびラボオンチップ(lab-on-a-chip)のようなマイクロ流体のための大きな可能性を有する。 文献に報告された最初のマイクロ流体プラットフォーム技術は、刺激応答性ゲルに基づいている。 水の電気分解を避けるために、ヒドロゲルベースのマイクロ流体デバイスは、主として、電気熱界面によって制御されるより低い臨界溶液温度(LCST)特性を有する温度応答性ポリマーに基づいている。 拡散マイクロポンプと変位マイクロポンプの2種類のマイクロポンプが知られている。 刺激応答性ヒドロゲルに基づくマイクロバルブは、粒子耐性、漏れなし、および優れた耐圧性などのいくつかの有利な特性を示す。 これらのマイクロ流体標準コンポーネントに加えて、ヒドロゲルプラットフォームは、化学センサおよび新規な種類のマイクロ流体コンポーネント、ケミカルトランジスタ(ケモスタットバルブとも呼ばれる)も提供する。 これらの装置は、特定の化学物質の閾値濃度に達すると、液体の流れを調節する。 化学的トランジスタは、ミクロ化学機械的集積回路の基礎を形成する。 「化学IC」は、化学情報のみを処理し、エネルギー自給式であり、自動的に動作し、大規模な統合が可能です。
別のマイクロ流体プラットフォームは、アイオノマー材料に基づいている。 その材料で作られたポンプは、低電圧(バッテリ)動作、極めて低いノイズ特性、高いシステム効率、および非常に正確な流量制御を提供することができます。
EAPアクチュエータのユニークな特性から利益を得ることができる別の技術は光学膜である。 低モジュラス、アクチュエータの機械的インピーダンスのために、これらは一般的な光学膜材料によく適合しています。 また、単一のEAPアクチュエータは、マイクロメートルからセンチメートルの範囲の変位を生成することができる。 このため、これらの材料を静的形状補正やジッタ抑制に使用することができます。 これらのアクチュエータは、大気干渉による光学収差を補正するために使用することもできる。
これらの材料は優れた電気活性特性を示すため、EAP材料は生体模倣ロボットの研究、ストレスセンサーおよび音響分野で潜在的可能性を示し、近い将来EAPをより魅力的な研究テーマにする。 ヒューマノイドロボットでは、顔面筋や腕の筋肉など、さまざまなアクチュエータに使用されています。
今後の方向性
EAPの分野はまだ成熟していないため、まだ取り組まなければならないいくつかの問題が残されています。 水不透過性表面を設計することにより、EAPの性能および長期安定性を改善しなければならない。 これは、EAPに含まれる水の蒸発を防止し、また、EAPが水性環境に浸漬して動作しているときの正の対イオンの潜在的な損失を低減する。 欠陥のない導電性表面を生成する方法を使用して、改良された表面伝導度を探究する必要があります。 これは、おそらく金属蒸着または他のドーピング方法を用いて行うことができる。 導電性ポリマーを利用して厚い導電層を形成することも可能である。 耐熱性EAPは、EAP複合体における熱の発生によるEAPの内部構造を損なうことなく、より高い電圧での動作を可能にすることが望ましい。 可能なモードの範囲を広げるために、異なる構成(例えば、繊維および繊維束)のEAPの開発も有益であろう。