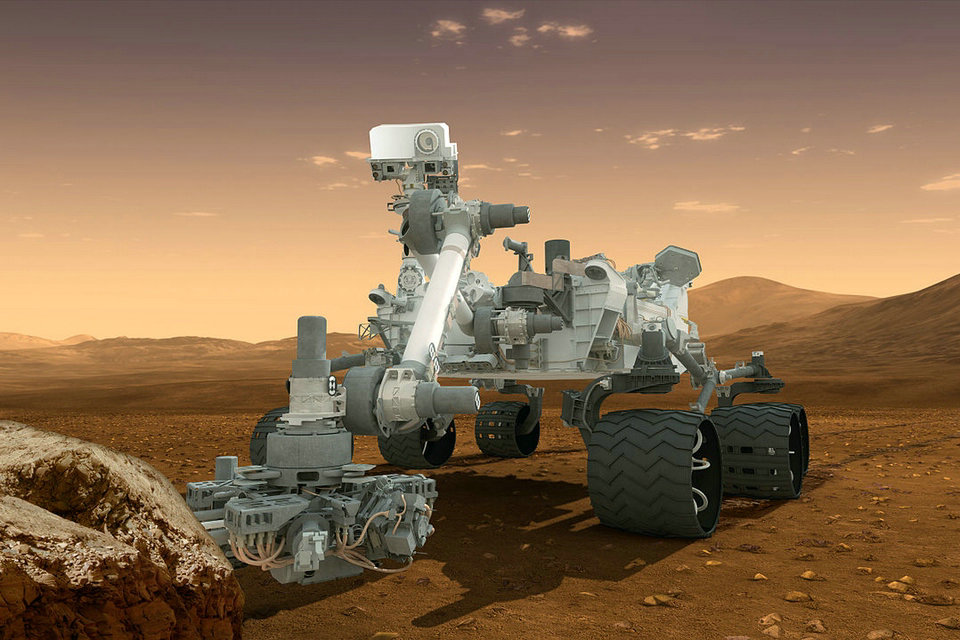
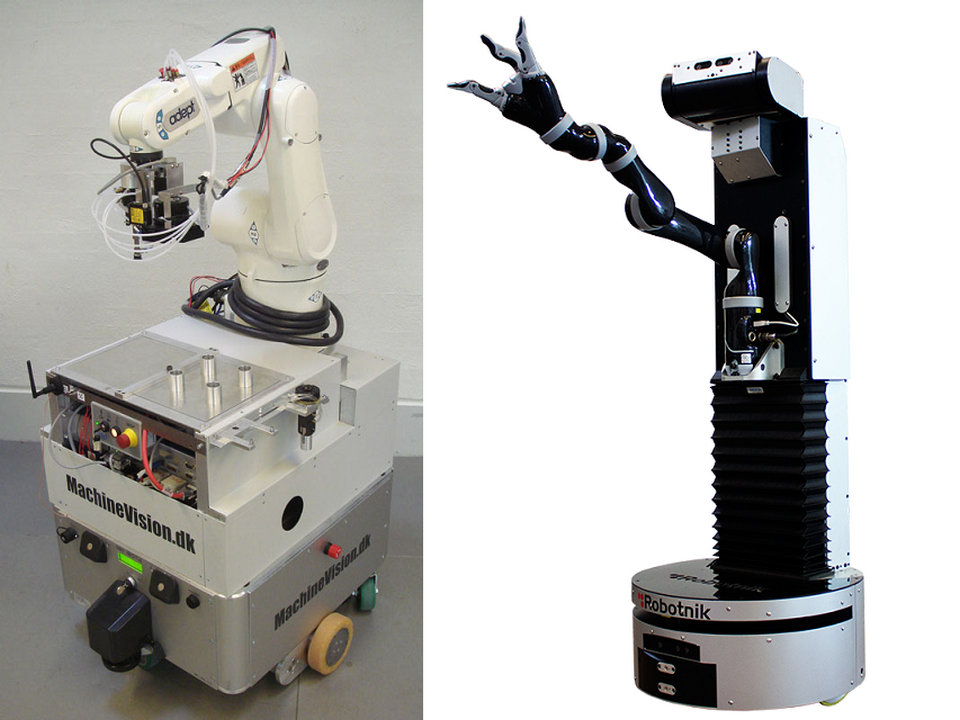
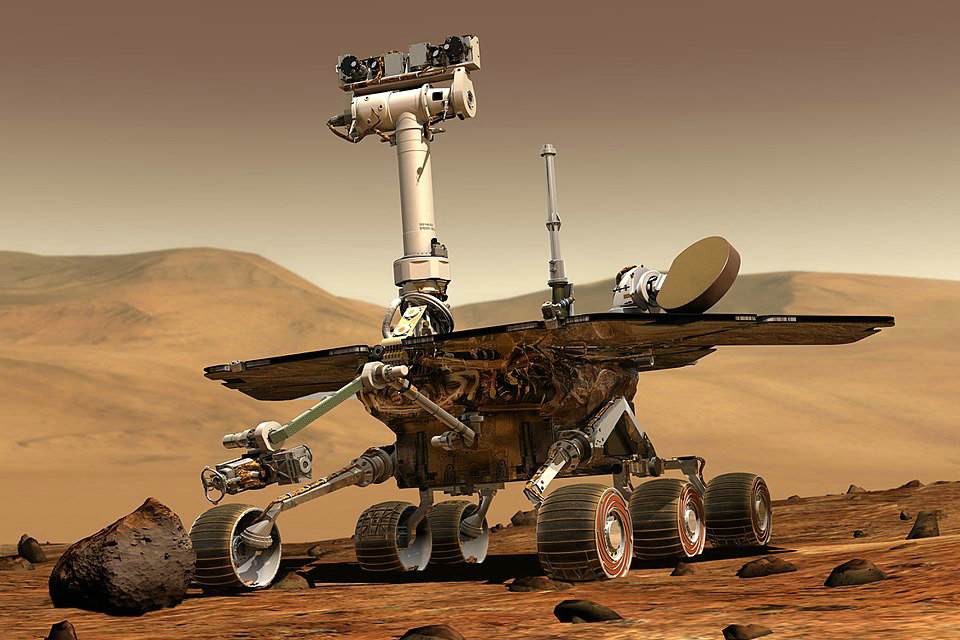
إن مناور الهاتف المحمول هو مصطلح واسع الانتشار في الوقت الحاضر للإشارة إلى أنظمة الروبوت التي تم بناؤها من ذراع مناول آلية تم تركيبها على منصة متنقلة. وتجمع هذه الأنظمة بين مزايا المنصات المتنقلة وأذرع التشغيل الآلية وتقلل من عيوبها. على سبيل المثال ، فإن المنصة المتنقلة تمد مساحة العمل الخاصة بالذراع…