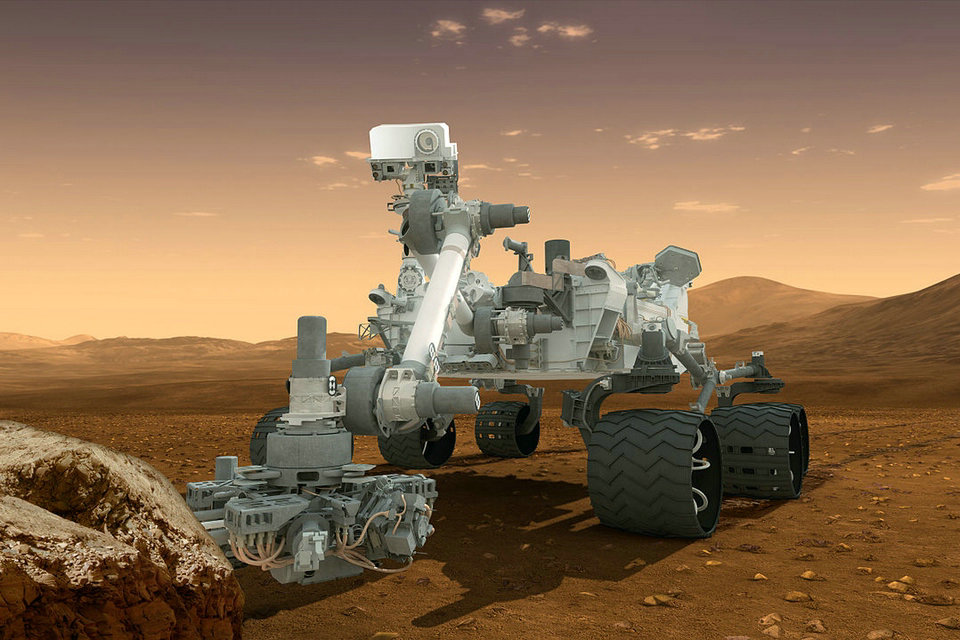
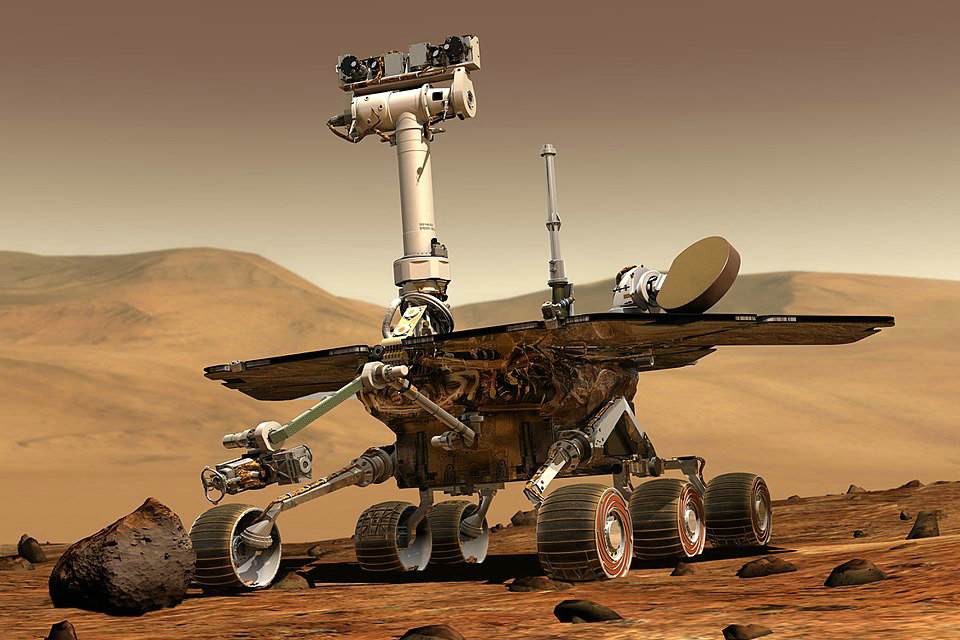
ロボットの移動は、ロボットが場所を移動するために使用するさまざまな方法の総称です。 車輪付きロボット…
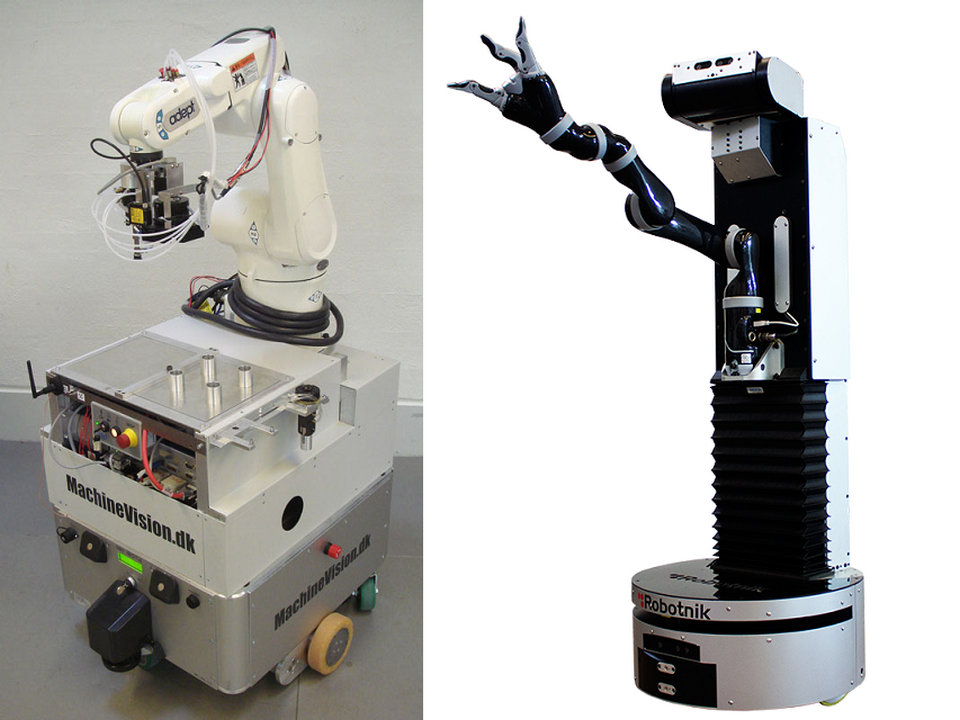
現在、モバイルマニピュレータは、モバイルプラットフォームに搭載されたロボットマニピュレータアームから…
ビジョン処理ユニット(VPU)は、新興のマイクロプロセッサである。 マシンビジョンタスクを加速するた…
触覚センサは、その環境との物理的相互作用から生じる情報を測定する装置である。 触覚センサは、一般に、…
ロボットセンサは、ロボットの状態および環境を推定するために使用される。 これらの信号は、適切な動作を…
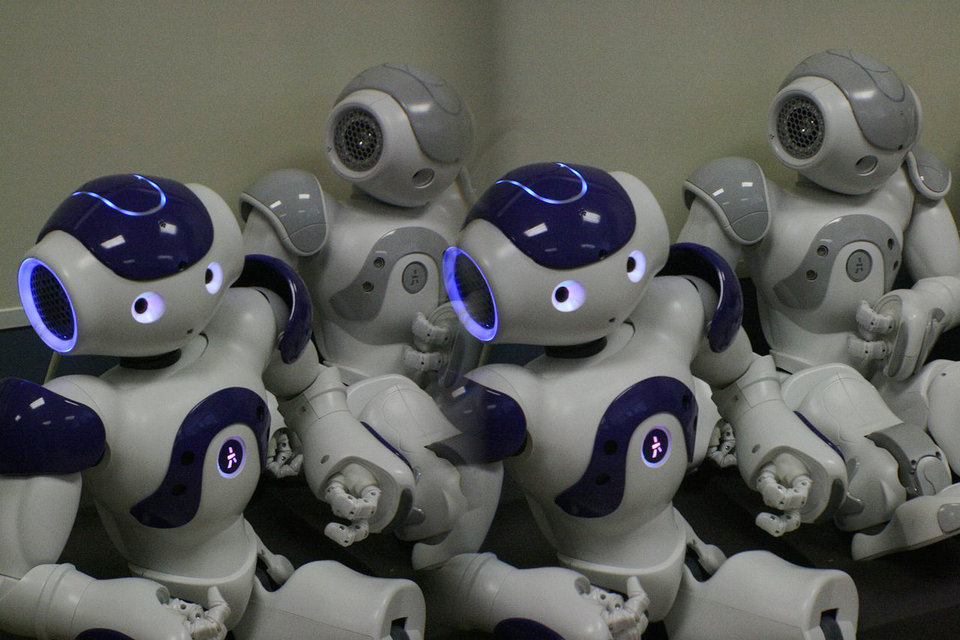
ロボットセンシングは、ロボットが能力を感知するように意図されたロボット科学のサブ領域であり、その結果…
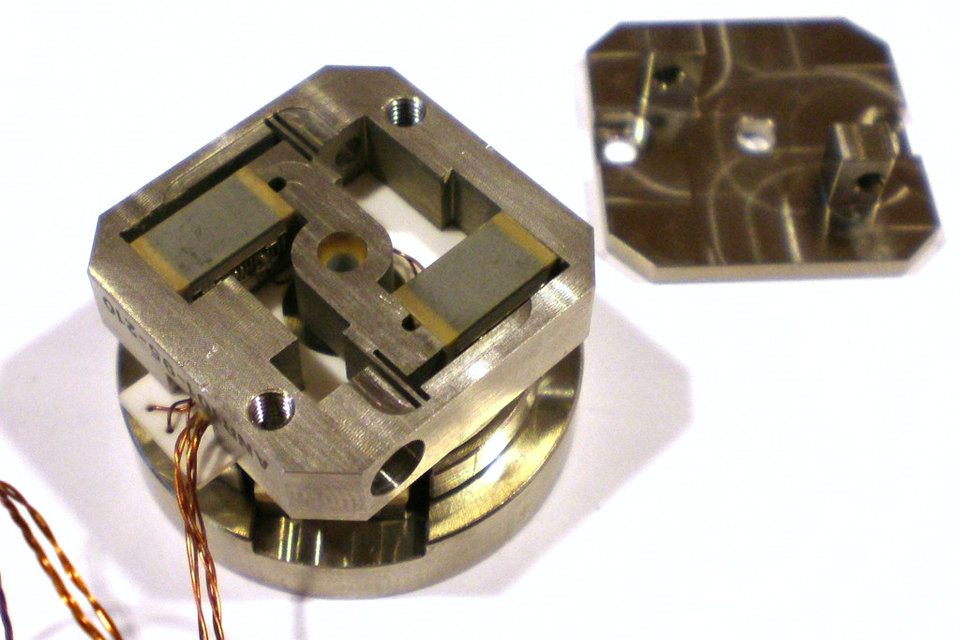
圧電モータは、電界が印加されたときの圧電材料の形状の変化に基づく電気モータの一種である。 圧電モータ…
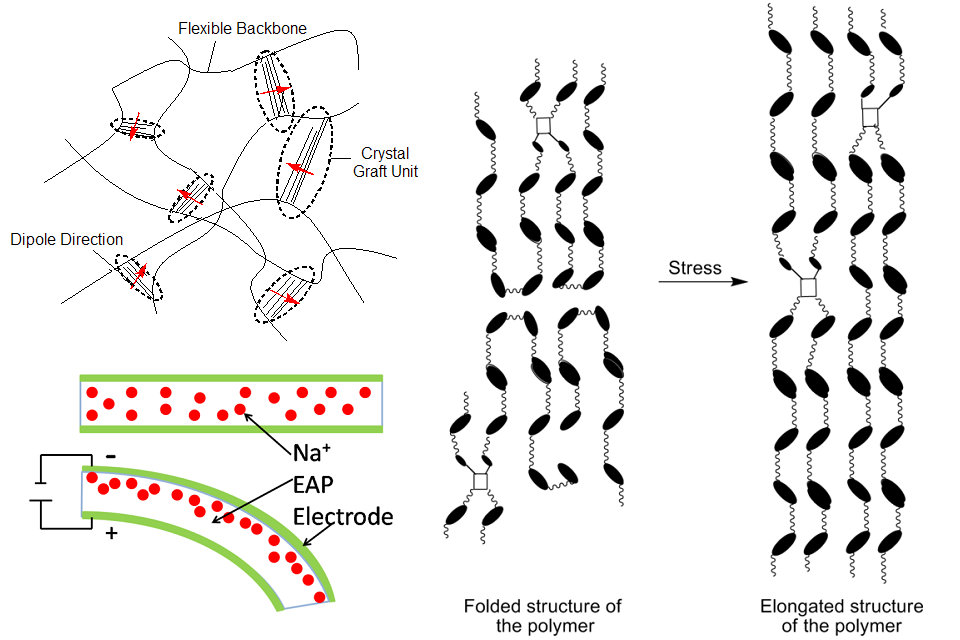
電気活性ポリマーまたはEAPは、電場によって刺激されたときにサイズまたは形状の変化を示すポリマーであ…
形状記憶合金(Shape-memory alloy SMA、スマートメタル、記憶金属、記憶合金、マッ…
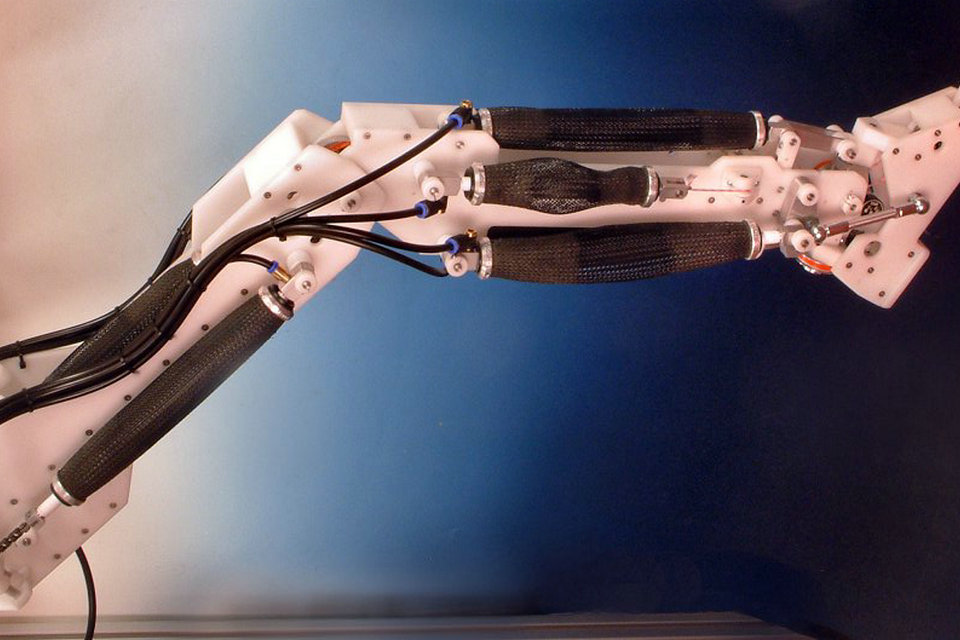
人工筋肉は、自然の筋肉を模倣し、外部刺激(電圧、電流、圧力または温度など)に起因して1つの構成要素内…
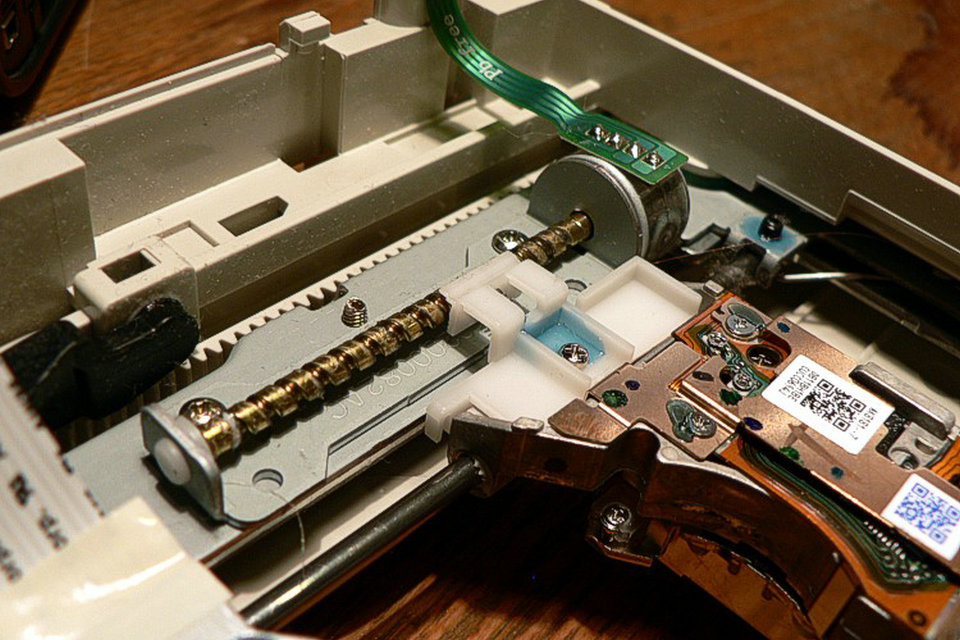
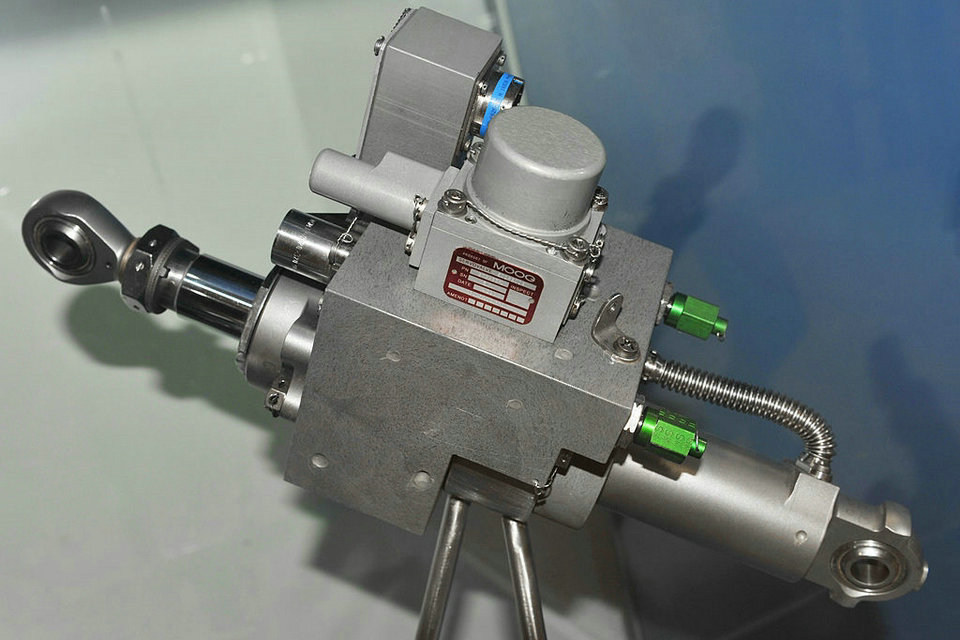
リニアアクチュエータは、従来の電気モータの円運動とは対照的に、直線で運動を生成するアクチュエータであ…
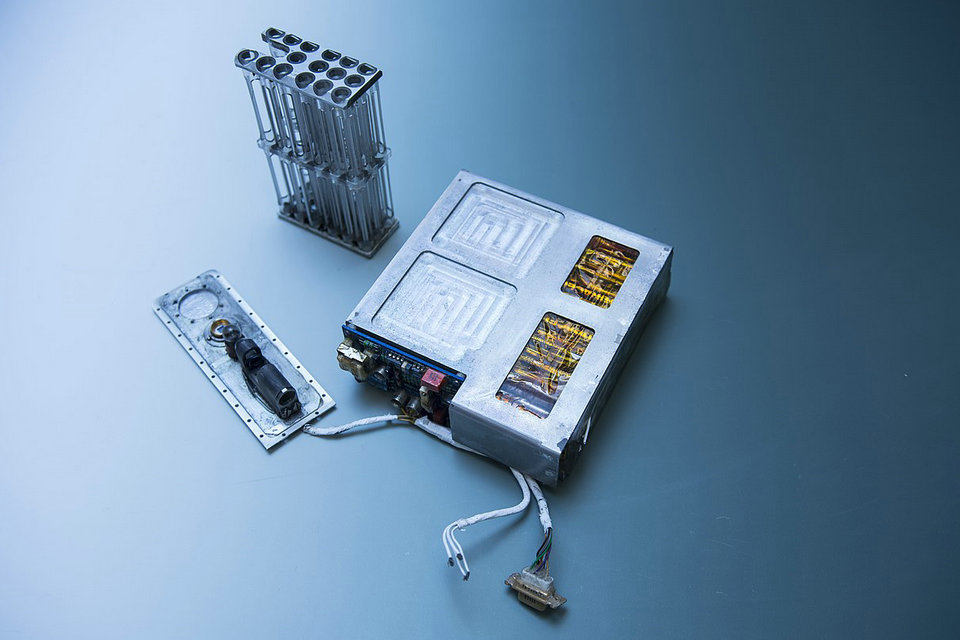
アクチュエータは、例えばバルブを開くことによって、機構またはシステムの移動および制御を担う機械の構成…
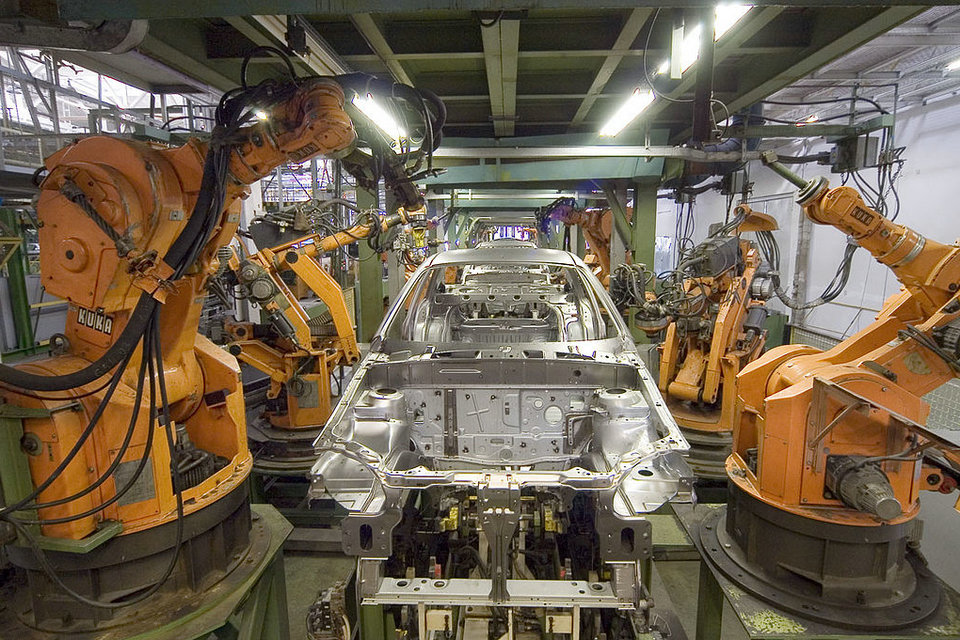
ロボットの歴史は、古代の世界で起きています。 現代のコンセプトは、複雑な力学の使用とその後の電気の導…
ロボット工学は、機械工学、電子工学、情報工学、コンピュータ科学などを含む、工学と科学の学際的な分野で…
コンピュータビジョンは、コンピュータがデジタル画像やビデオから高レベルの理解を得るためにどのように作…