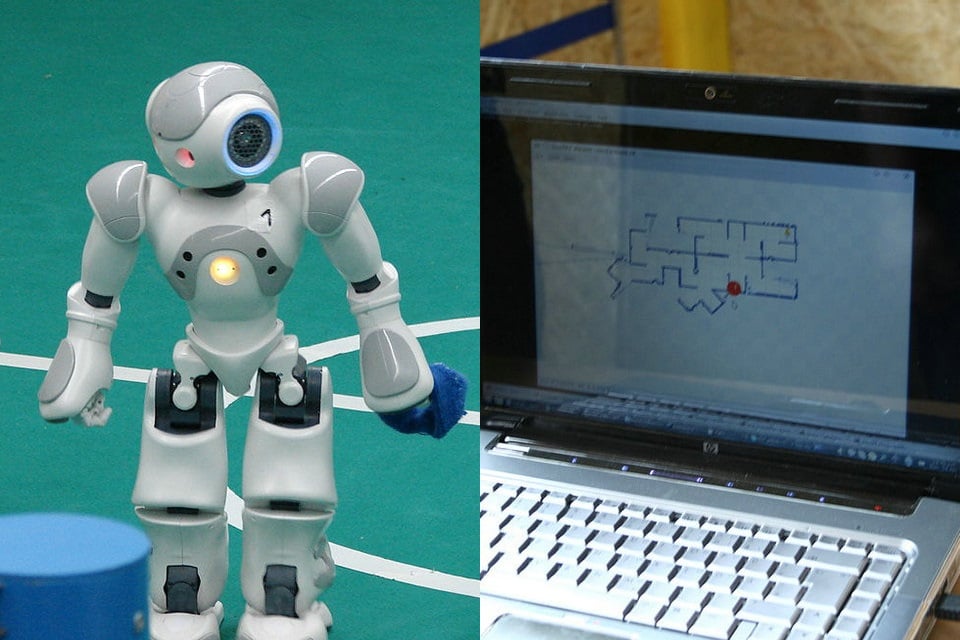
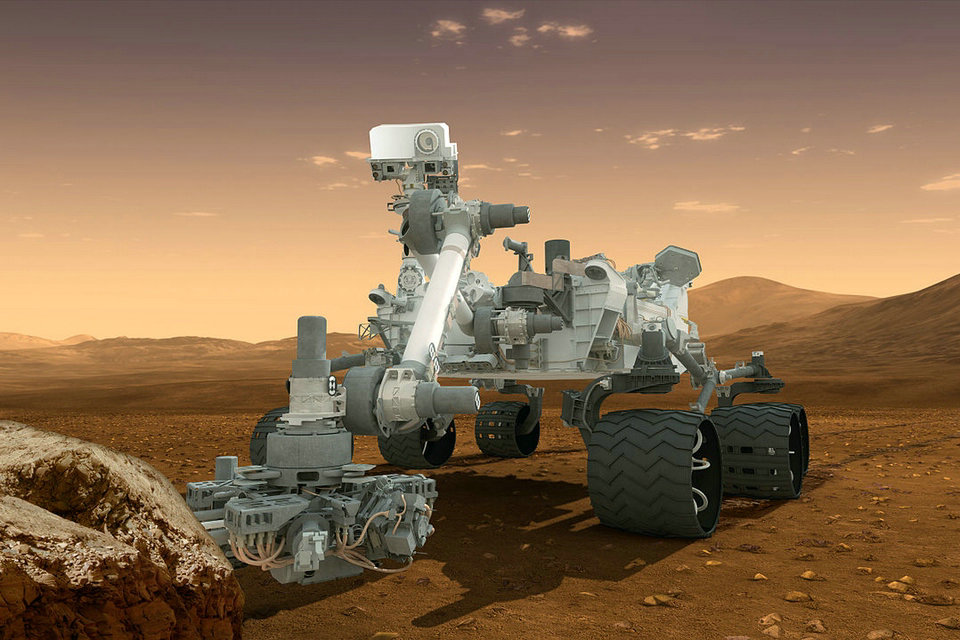
로봇 네비게이션 모든 모바일 장치에서 해당 환경에서 탐색 할 수있는 기능이 중요합니다. 충돌이나 위험한 상황 (온도, 방사선, 날씨에 노출 등)과 같은 위험한 상황을 피하십시오. 그러나 로봇이 로봇 환경의 특정 장소와 관련된 목적을 가지고 있다면, 그 장소를 찾아야합니다. 이 기사에서는 네비게이션 기술의 개요와 로봇 네비게이션 시스템의 기본 블록, 네비게이션 시스템 유형 및 관련… 로봇 네비게이션
로봇 맵핑 로봇 매핑은지도 제작과 관련된 분야입니다. 자율 로봇의 목표는지도 (옥외 사용) 또는 평면 (실내 사용)을 구성 (또는 사용)하고 자체 및 그 충전 기지 또는 비콘을 현지화하는 것입니다. 로봇 맵핑은지도 / 계획에서 자체적으로 현지화하고 경우에 따라 자율 로봇에 의해지도 또는 평면을 작성하는 기능을 연구하고 적용하는 지점입니다. 진화 적으로 형성된 맹목적인 행동은 동물을… 로봇 맵핑
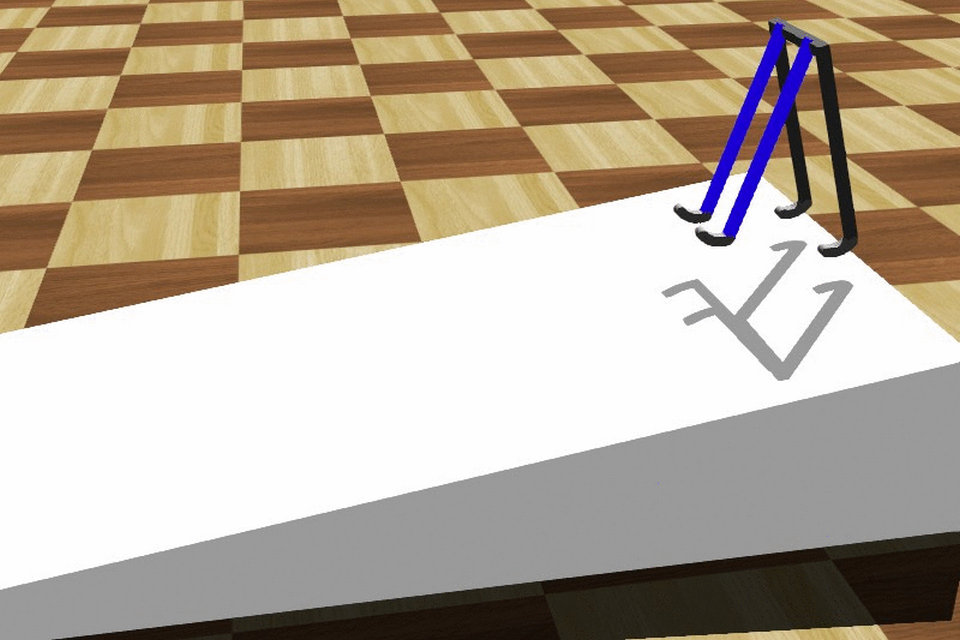
수동 역 동성 수동 동력학은 액추에이터, 로봇 또는 생물체가 동력원 (예 : 배터리, 연료, ATP)에서 에너지를 끌어 오지 않을 때 동력 학적 동작을 의미합니다. 애플리케이션에 따라 전원 시스템의 수동 동역학을 고려하거나 변경하면 성능, 특히 에너지 경제성, 안정성 및 작업 대역폭에 큰 영향을 줄 수 있습니다. 전원을 사용하지 않는 장치는 “수동”으로 간주되며, 그 동작은 수동적 인… 수동 역 동성
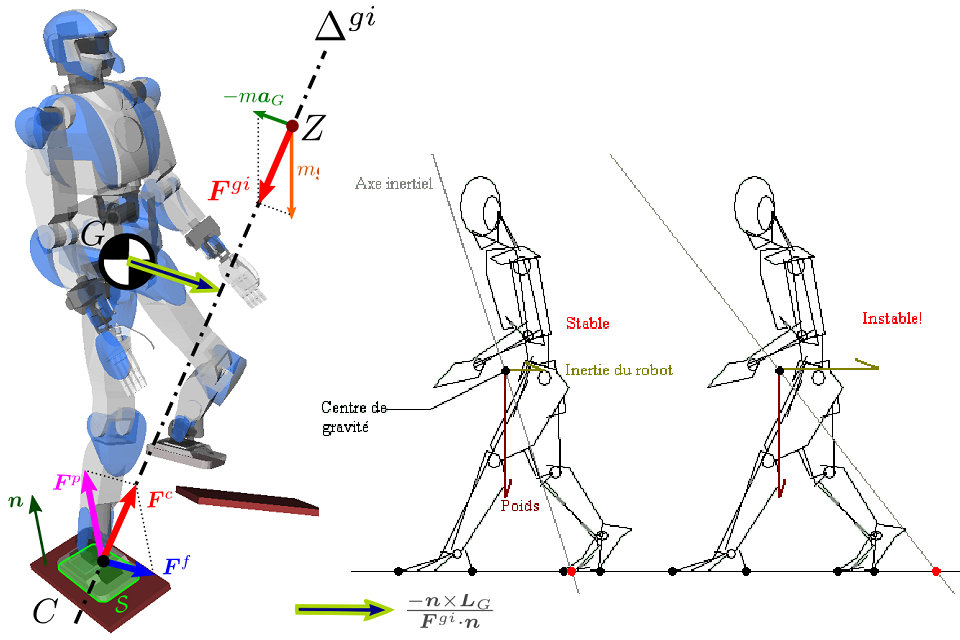
제로 점 제로 순간 지점은 인간형 로봇과 같은 다리 운동의 역 동성 및 제어와 관련된 개념입니다. 이것은 발의지면과의 접촉에서의 동적 반력이 수평 방향에서 어떤 모멘트도 일으키지 않는 점, 즉 수평 관성 및 중력의 합계가 0 (영)과 같은 점을 지정합니다. 이 개념은 접촉 영역이 평평하고 다리가 미끄러지지 않도록 충분히 높은 마찰을 가지고 있다고 가정합니다. 소개… 제로 점
구형 로봇 구형 이동 로봇 또는 공 모양 로봇으로도 알려진 구형 로봇은 구형 외형을 가진 이동 로봇입니다. 구형 로봇은 일반적으로 로봇의 몸체 역할을하는 구형 쉘과 로봇이 움직일 수 있도록하는 내부 구동 장치 (IDU)로 구성됩니다. 구형 이동 로봇은 일반적으로 표면 위로 굴러 이동합니다. 롤링 동작은 일반적으로 로봇의 질량 중심 (즉, 진자 구동 시스템)을… 구형 로봇
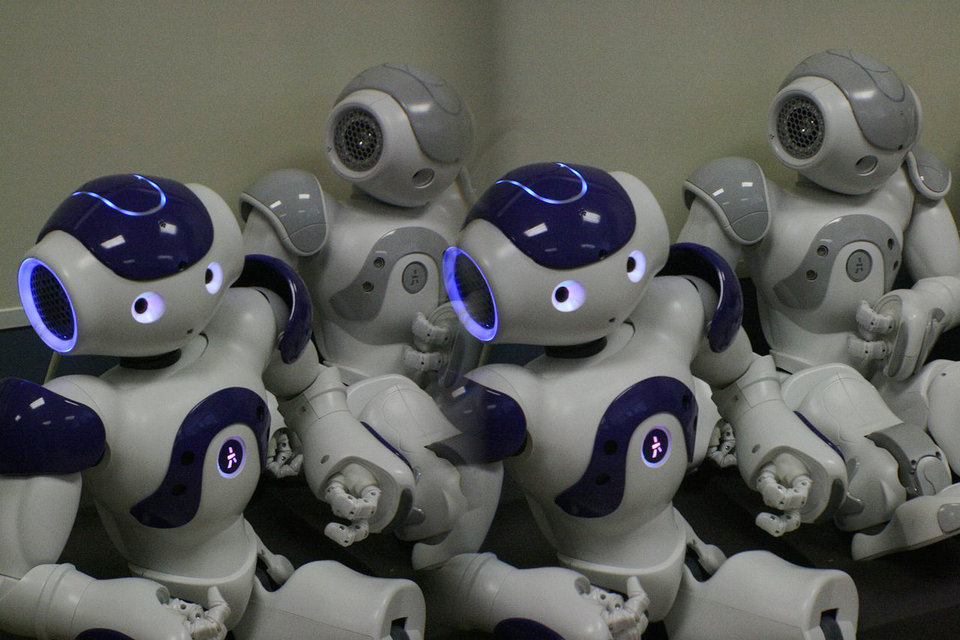
(English) Mobile robot 죄송합니다.이 항목은 English, Español, Deutsch, Français, Português, Русский, 中文, 日本語, العربية and हिंदी… (English) Mobile robot
(English) Robot locomotion 죄송합니다.이 항목은 English, Español, Deutsch, Français, Português, Русский, 中文, 日本語, العربية and हिंदी… (English) Robot locomotion
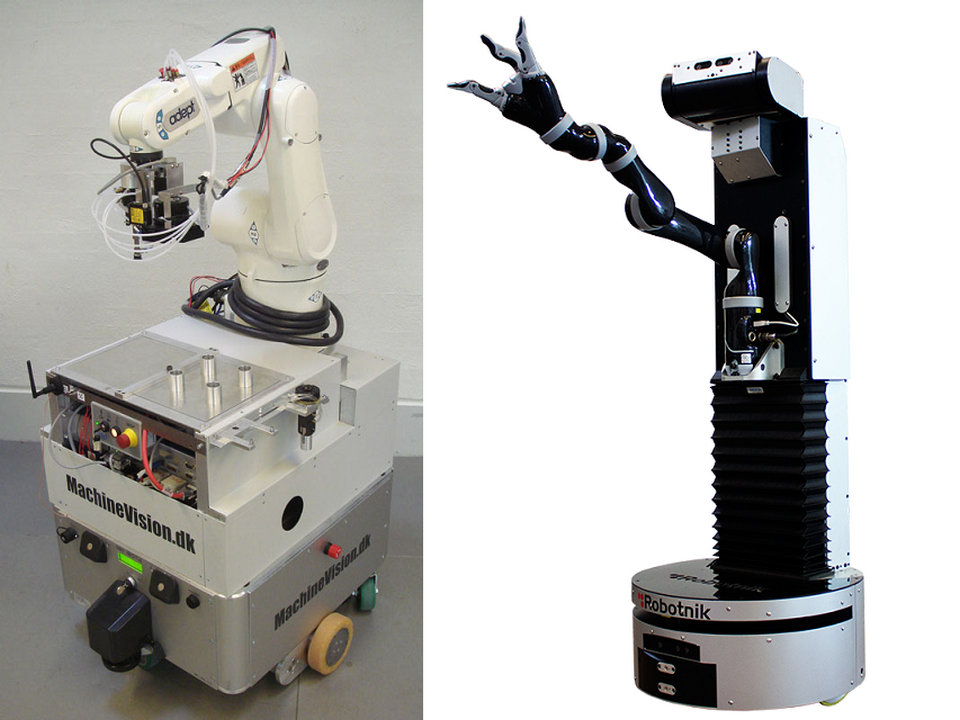
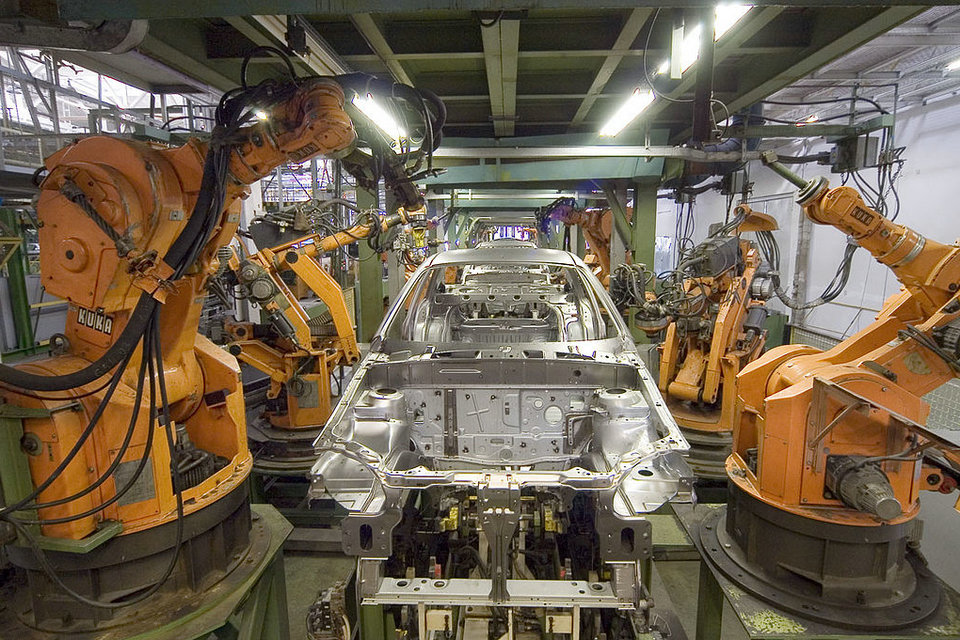
모바일 조작자 모바일 매니퓰레이터는 요즘 모바일 플랫폼에 탑재 된 로봇 매니퓰레이터 암으로 제작 된 로봇 시스템을 지칭하는 광범위한 용어입니다. 이러한 시스템은 모바일 플랫폼과 로봇 조작기 암의 장점을 결합하고 단점을 줄입니다. 예를 들어, 모바일 플랫폼은 팔의 작업 공간을 확장하는 반면 팔은 여러 가지 작동 기능을 제공합니다. 기술 모바일 조작 시스템은 모바일 플랫폼이 제공하는… 모바일 조작자
비전 프로세싱 유닛 VPU (Visual Processing Unit)는 새로운 종류의 마이크로 프로세서입니다. 이것은 머신 비전 작업을 가속화하도록 설계된 특정 유형의 AI 가속기입니다. 개요 비전 처리 장치는 CNN (길쌈 신경 네트워크), SIFT (스케일 불변의 변환), … 등의 머신 비전 알고리즘을 실행하는 데 적합하다는 점에서 비디오 인코딩 및 디코딩을 전문으로하는 비디오 처리 장치와 다릅니다. . 카메라에서… 비전 프로세싱 유닛
(English) Robotic sensing 죄송합니다.이 항목은 English, Español, Deutsch, Français, Português, Русский, 中文, 日本語, العربية and हिंदी… (English) Robotic sensing
(English) History of robots 죄송합니다.이 항목은 English, Español, Deutsch, Français, Português, Русский, 中文, 日本語, العربية and हिंदी… (English) History of robots
(English) Robotics 죄송합니다.이 항목은 English, Español, Deutsch, Français, Português, Русский, 中文, 日本語, العربية and हिंदी… (English) Robotics
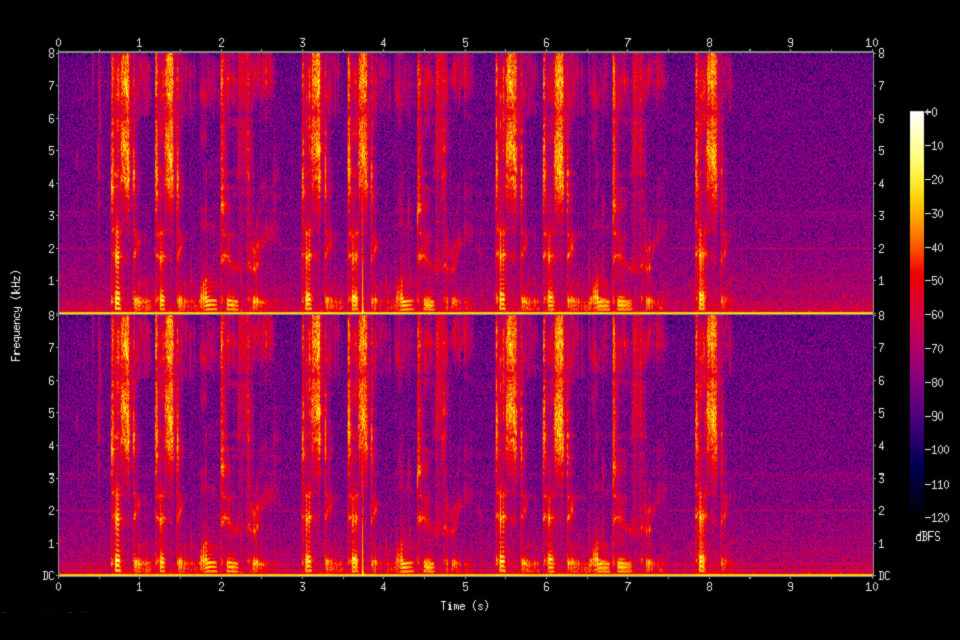
(English) Speech recognition 죄송합니다.이 항목은 English, Español, Deutsch, Français, Português, Русский, 中文, 日本語, العربية and हिंदी… (English) Speech recognition
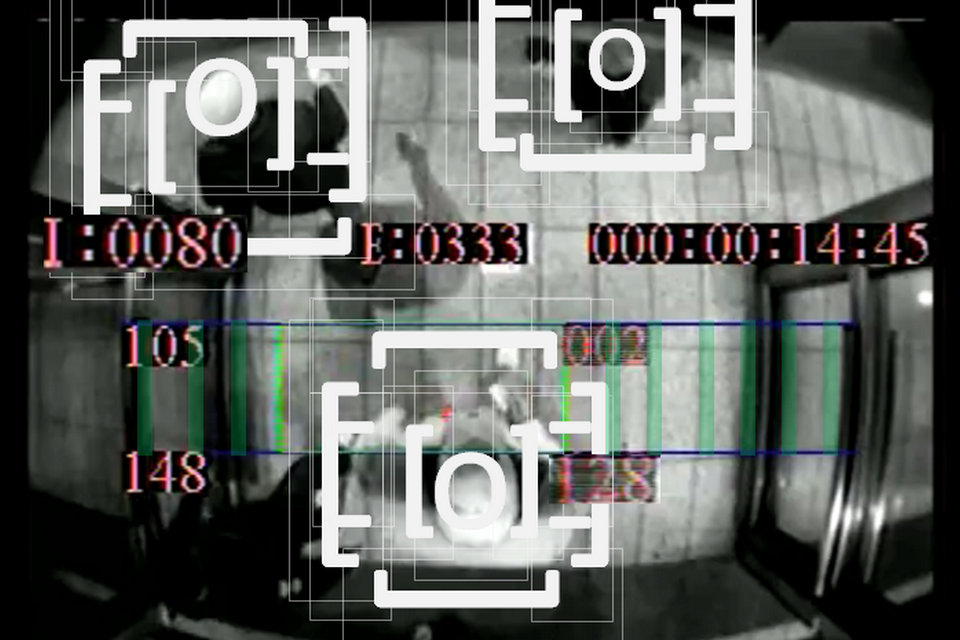
컴퓨터 비전 컴퓨터 비전은 컴퓨터가 디지털 이미지 또는 비디오를 통해 높은 수준의 이해를 얻는 방법을 다루는 학제 간 분야입니다. 엔지니어링 관점에서 볼 때 인간 시각 시스템이 할 수있는 작업을 자동화하려고합니다. 컴퓨터 비전 작업에는 디지털 이미지를 수집, 처리, 분석 및 이해하는 방법과 현실 세계에서 고차원 데이터를 추출하여 숫자 또는 기호 정보 (예 :… 컴퓨터 비전
(English) Machine perception 죄송합니다.이 항목은 English, Español, Deutsch, Français, Português, Русский, 中文, 日本語, العربية and हिंदी… (English) Machine perception