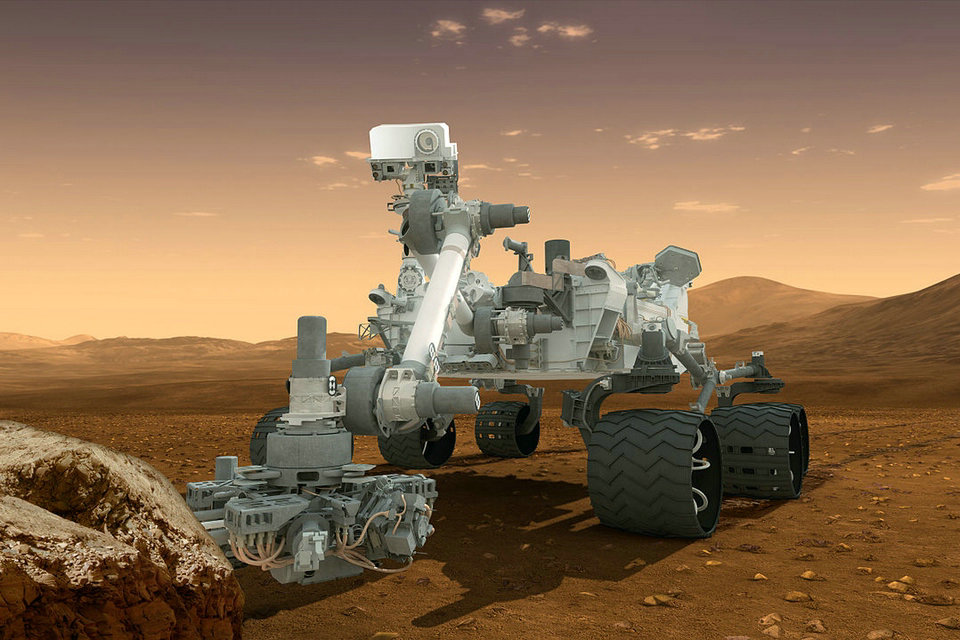
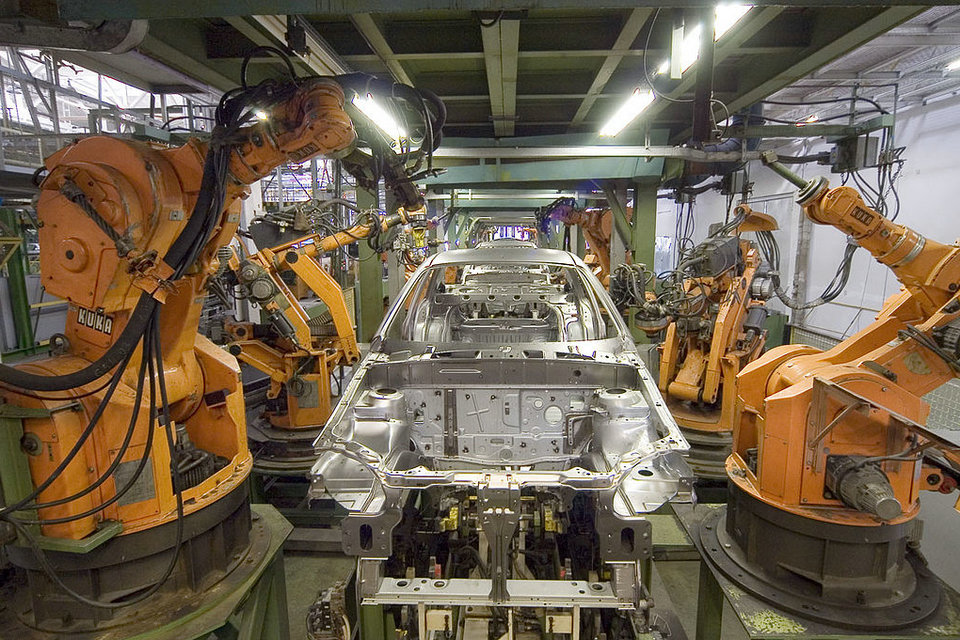
Robotics — это междисциплинарная отрасль техники и науки, которая включает в себя машиностроение, электронику, информационную инженерию, информатику и другие. Робототехника занимается проектированием, строительством, эксплуатацией и использованием роботов, а также компьютерными системами для их контроля, сенсорной обратной связи и обработки информации. Эти технологии используются для разработки машин, которые могут заменить людей…