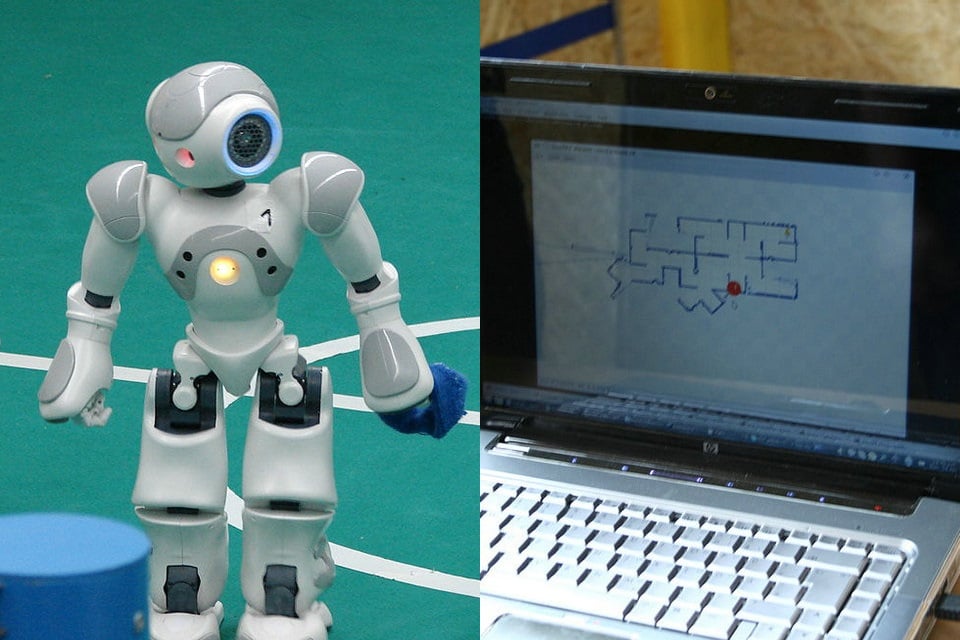
对于任何移动设备,在其环境中导航的能力非常重要。 首先避免碰撞和不安全条件(温度,辐射,暴露于天气等…
机器人绘图(Robotic mapping)是与制图相关的学科。 自主机器人的目标是能够构建(或使用…
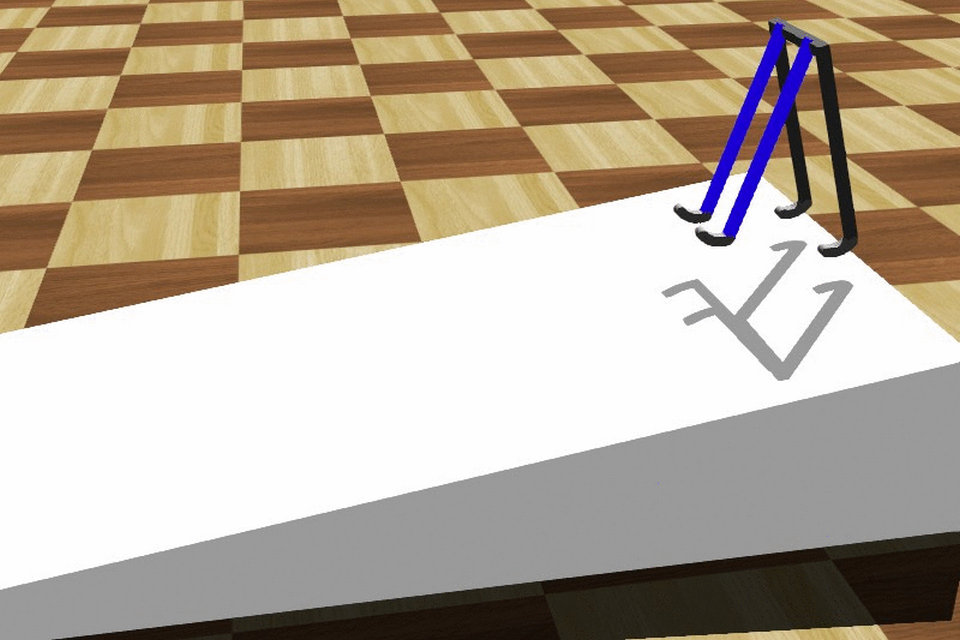
被动动力学(Passive dynamics)是指致动器,机器人或生物体在不从供应源(例如,电池,燃…
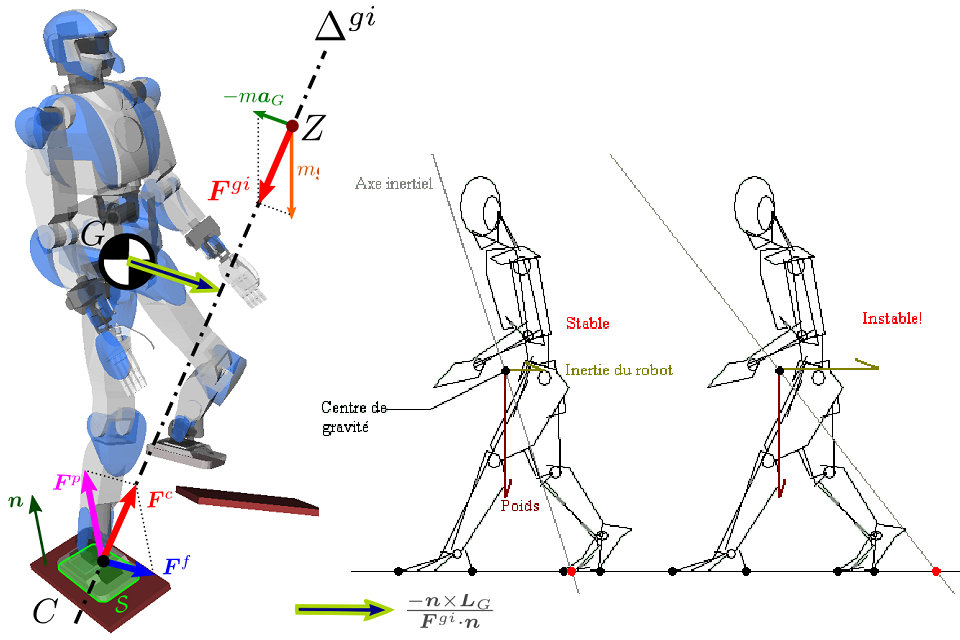
零力矩点(Zero moment point ZMP)是与腿部运动的动力学和控制相关的概念,例如,用…
球形机器人(Spherical robot),也称为球形移动机器人,或球形机器人,是一种球形外形的移…
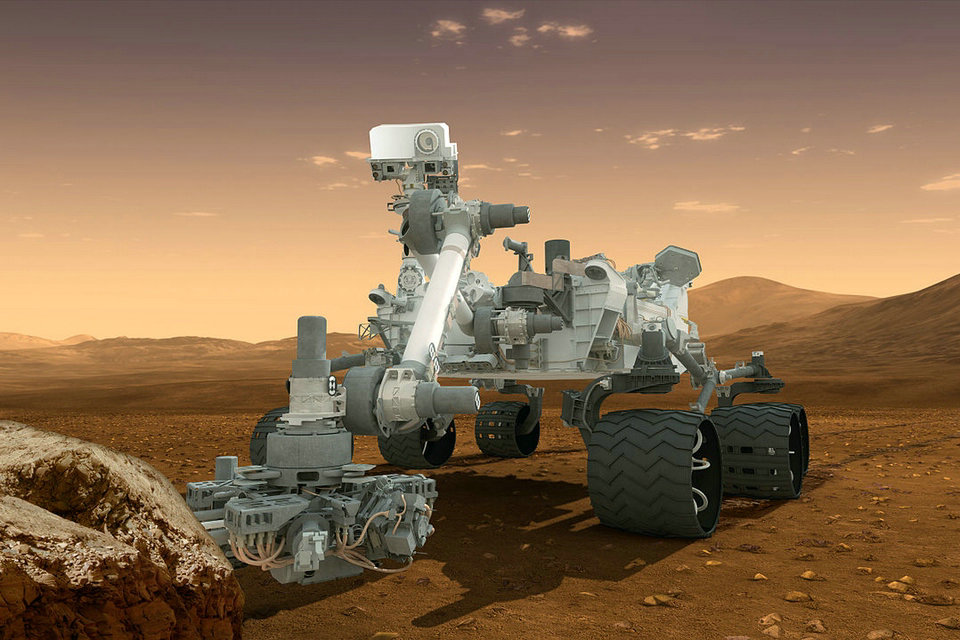
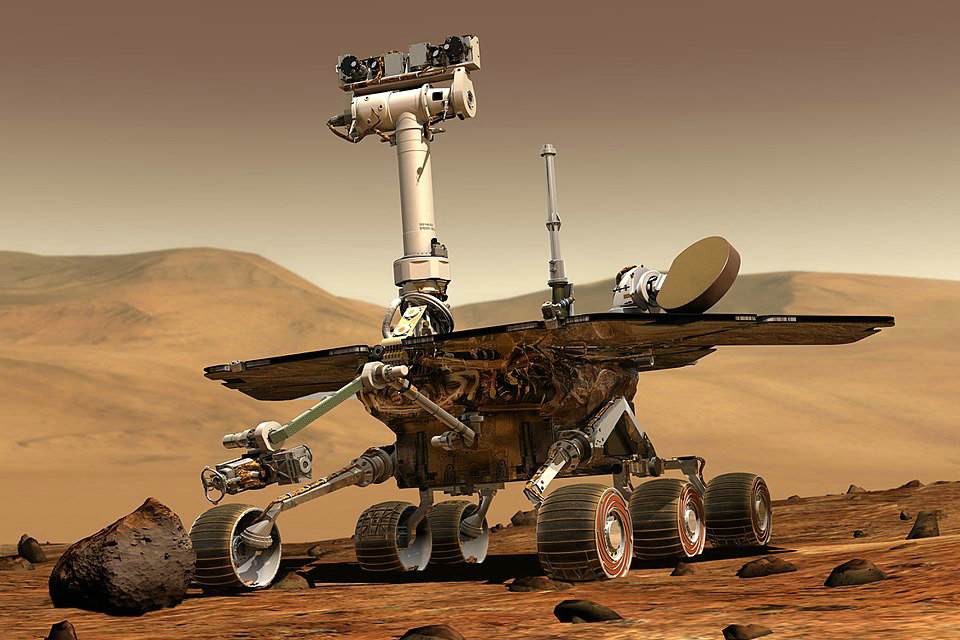
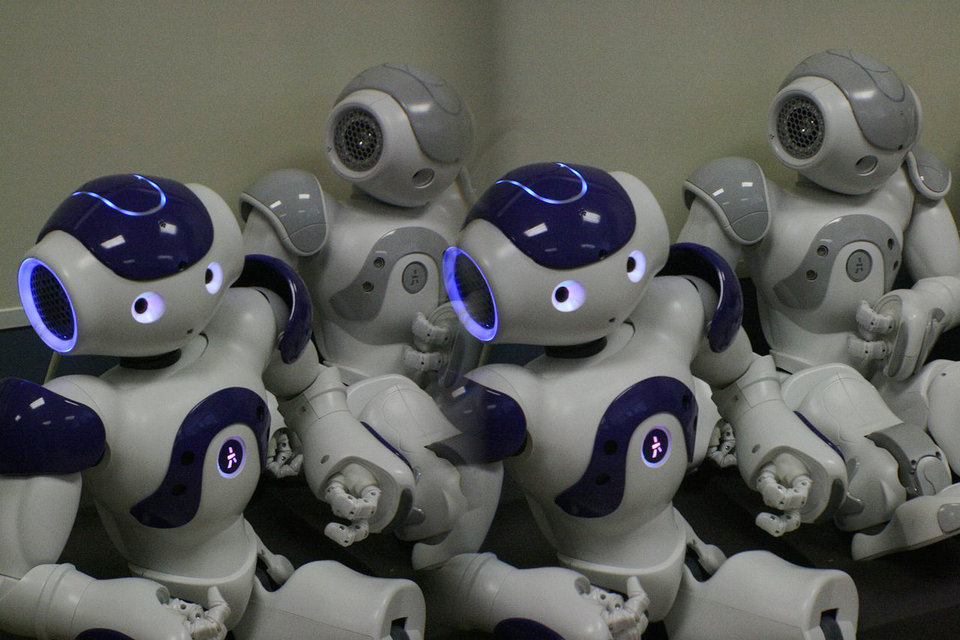
移动机器人是能够移动的机器人。 移动机器人通常被认为是机器人和信息工程的子领域。 移动机器人具有在其…
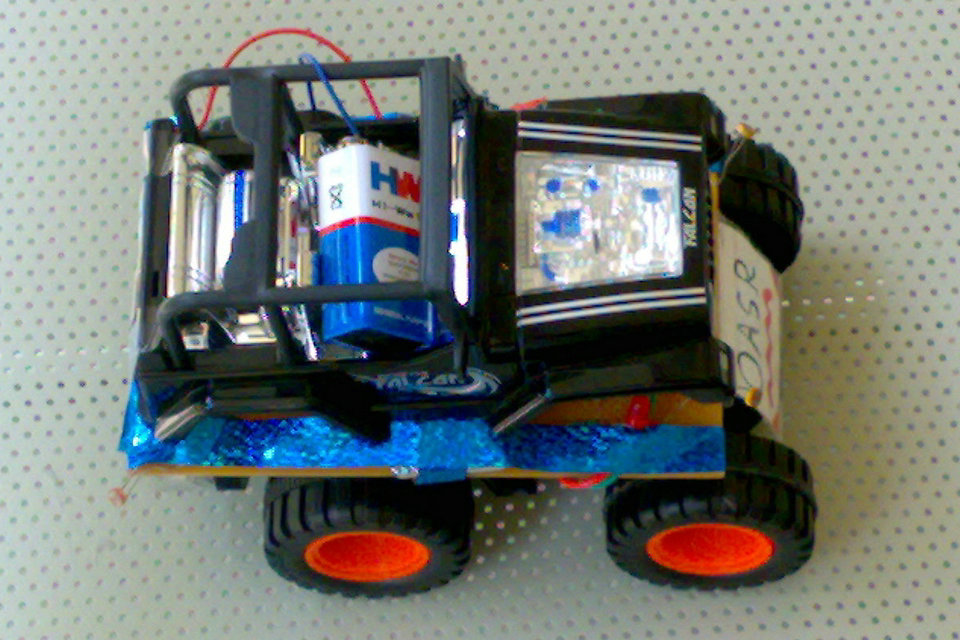
机器人运动是机器人用于从一个地方到另一个地方运输的各种方法的总称。 轮式机器人通常非常节能且易于控制…
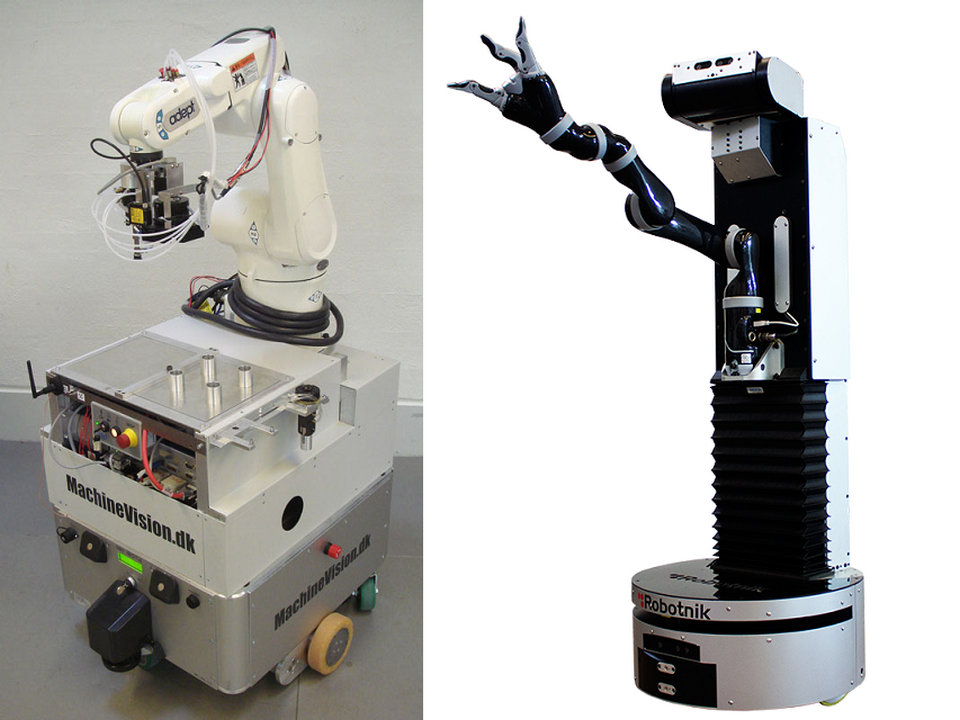
移动机械臂(Mobile manipulator)现在是一个广泛的术语,指的是由安装在移动平台上的机…
视觉处理单元(Vision processing unit VPU)是一种新兴的微处理器; 它是一种…
机器人传感(Robotic sensing)是机器人科学的一个分区,旨在为机器人提供传感能力,使机器…
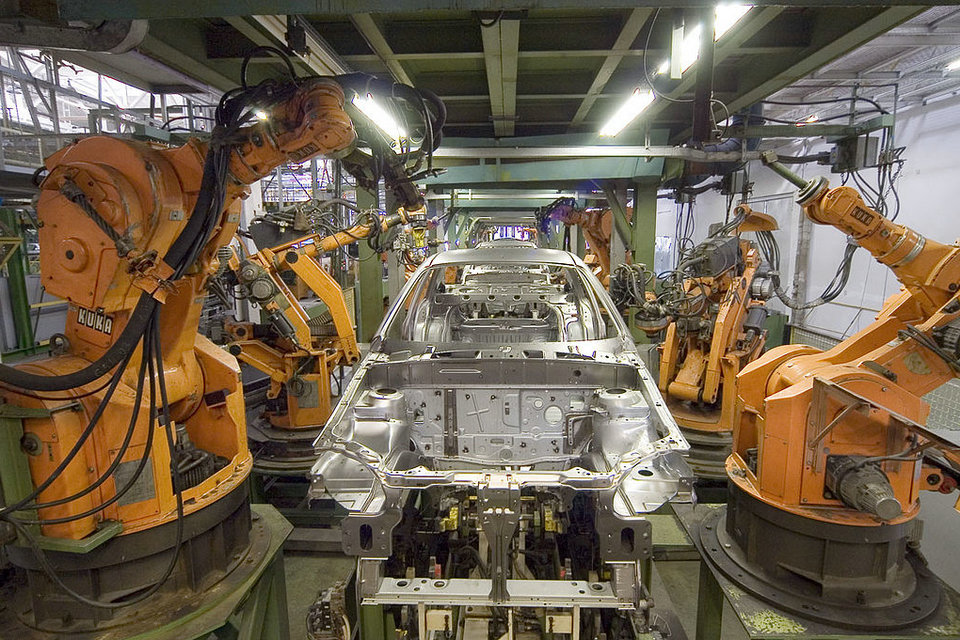
机器人的历史源于古代世界。 随着工业革命的开始,现代概念开始发展,这允许使用复杂的技术,并随后引入电…
机器人技术(Robotics)是工程和科学的跨学科分支,包括机械工程,电子工程,信息工程,计算机科学…
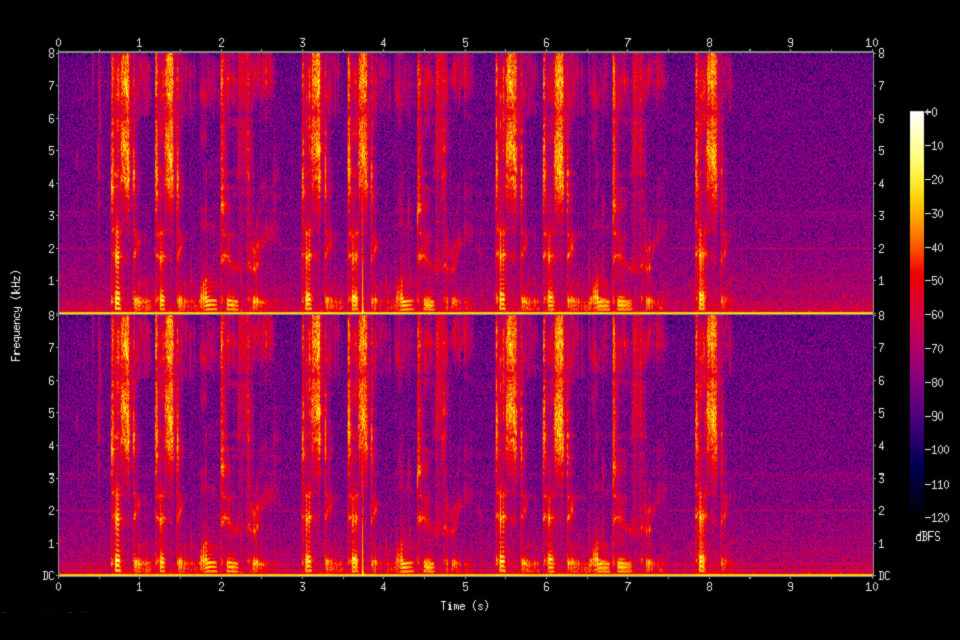
语音识别是计算语言学的跨学科子领域,其开发方法和技术,使得能够通过计算机识别和翻译口语。 它也被称为…
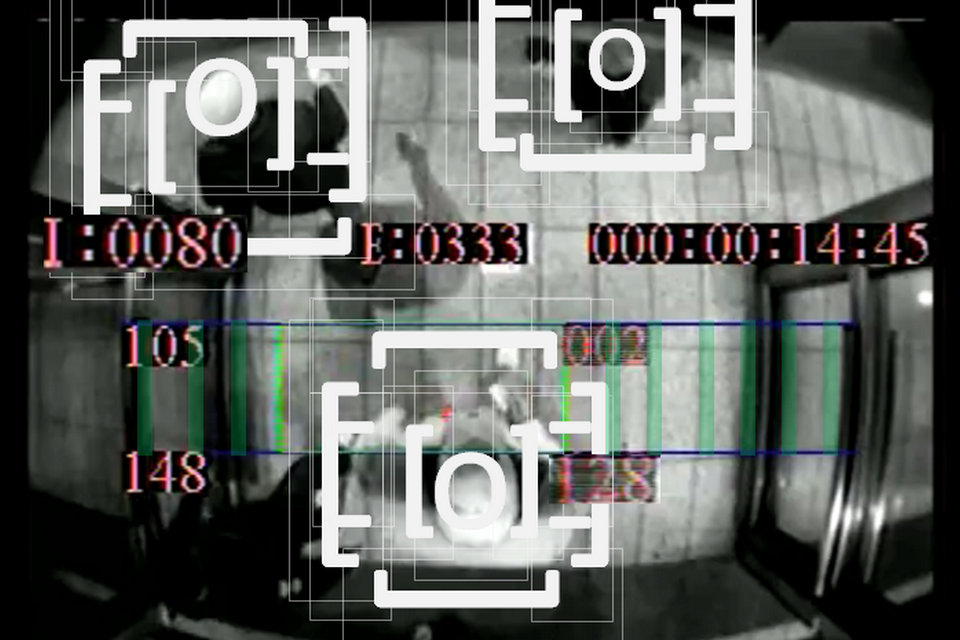
计算机视觉(Computer vision)是一个跨学科领域,涉及如何使计算机从数字图像或视频中获得…
机器感知是计算机系统以类似于人类利用其感官与周围世界相关的方式解释数据的能力。 计算机接收和响应其环…