Braccio robotico Un braccio robotico è un tipo di braccio meccanico, di solito programmabile, con funzioni simili a un braccio umano; il braccio può essere la somma totale del meccanismo o può far parte di un robot più complesso. I collegamenti di tale manipolatore sono collegati da giunti che consentono il movimento… Braccio robotico
Robot industriale Un robot industriale è un sistema robot utilizzato per la produzione. I robot industriali sono automatizzati, programmabili e in grado di muoversi su due o più assi. Le applicazioni tipiche dei robot includono la saldatura, la verniciatura, l’assemblaggio, il prelievo e il posizionamento di schede per circuiti stampati, l’imballaggio e… Robot industriale
(English) Animatronics Ci spiace, ma questo articolo è disponibile soltanto in Inglese Americano, Spagnolo Europeo, Tedesco, Francese, Portoghese Europeo, Russo, 中文, Giapponese, Arabo e Hindi.… (English) Animatronics
(English) Claytronics Ci spiace, ma questo articolo è disponibile soltanto in Inglese Americano, Spagnolo Europeo, Tedesco, Francese, Portoghese Europeo, Russo, 中文, Giapponese, Arabo e Hindi.… (English) Claytronics
(English) Cyborg Ci spiace, ma questo articolo è disponibile soltanto in Inglese Americano, Spagnolo Europeo, Tedesco, Francese, Portoghese Europeo, Russo, 中文, Giapponese, Arabo e Hindi.… (English) Cyborg
Robot umanoide Un robot umanoide è un robot con la sua forma fisica costruita per assomigliare al corpo umano. Il design può essere per scopi funzionali, come l’interazione con strumenti e ambienti umani, a fini sperimentali, come lo studio di locomozione, o per altri scopi. In generale, i robot umanoidi hanno un tronco, una… Robot umanoide
Leggi di robotica Le leggi della Robotica sono un insieme di leggi, regole o principi, che sono intesi come un quadro fondamentale per sostenere il comportamento di robot progettati per avere un certo grado di autonomia. I robot di questo livello di complessità non esistono ancora, ma sono stati ampiamente anticipati nella fantascienza,… Leggi di robotica
Robot Un robot è una macchina, soprattutto programmabile da un computer, in grado di eseguire automaticamente una serie complessa di azioni. I robot possono essere guidati da un dispositivo di controllo esterno o il controllo può essere incorporato all’interno. I robot possono essere costruiti per assumere forma umana, ma la maggior… Robot
Competizione robotica Una competizione robotica è un evento in cui i robot devono svolgere un compito. Di solito devono battere altri robot per diventare il migliore. Molte competizioni sono per le scuole ma nascono diverse competizioni professionali. Tipi di competizione. Attualmente ci sono diversi tipi di competizioni, le più popolari in molti paesi sono… Competizione robotica
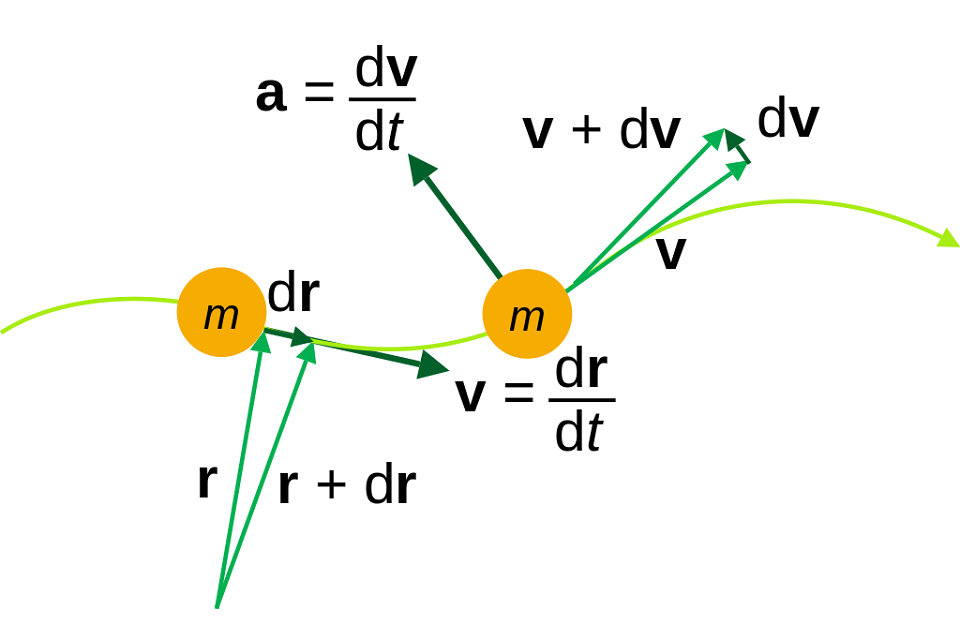
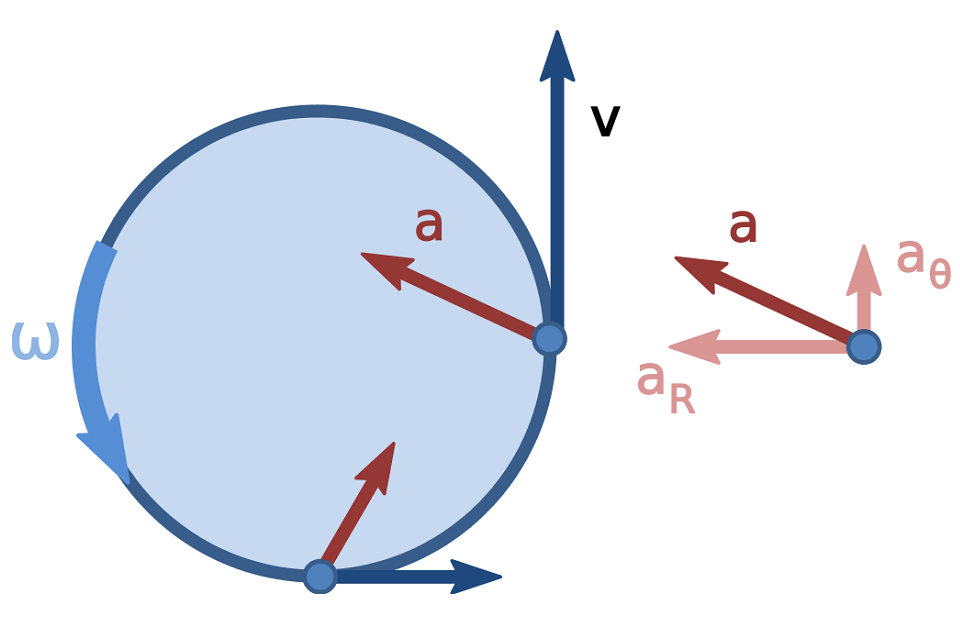
Cinematica delle particelle La cinematica delle particelle è lo studio della traiettoria di una particella. La posizione di una particella è definita come il vettore di coordinate dall’origine di una cornice di coordinate alla particella. Cinematica di una traiettoria delle particelle in un sistema di riferimento non rotante Nel caso più generale, un sistema… Cinematica delle particelle
Cinematica La cinematica è il ramo della fisica che descrive il movimento di oggetti solidi senza considerare le cause che hanno origine (le forze) e principalmente limitato allo studio della storia in funzione del tempo. Per questo, utilizza velocità e accelerazioni, che descrivono come la posizione cambia in funzione del tempo. La velocità… Cinematica
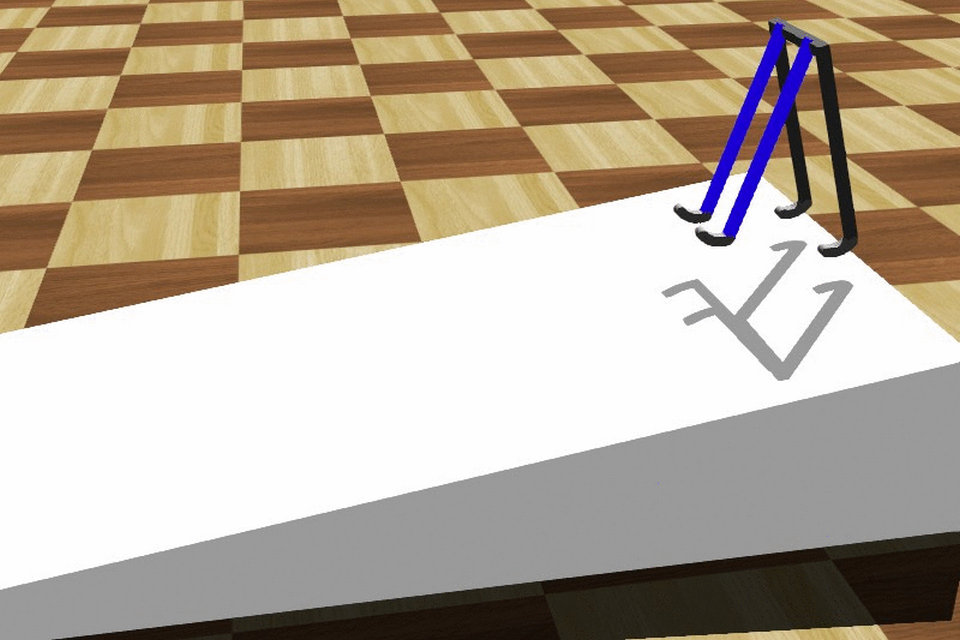
Dinamica passiva La dinamica passiva si riferisce al comportamento dinamico di attuatori, robot o organismi quando non si pesca energia da una fonte (ad esempio, batterie, carburante, ATP). A seconda dell’applicazione, considerare o modificare la dinamica passiva di un sistema alimentato può avere effetti drastici sulle prestazioni, in particolare sull’economia dell’energia, sulla… Dinamica passiva
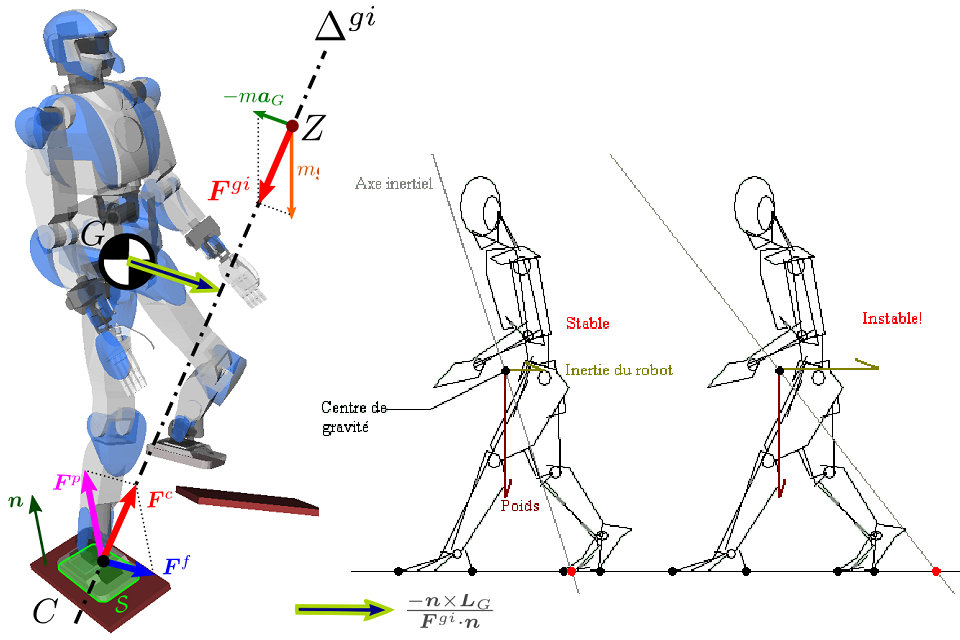
Punto di momento zero Punto di momento zero è un concetto relativo alla dinamica e al controllo della locomozione con gambe, ad esempio per robot umanoidi. Specifica il punto rispetto al quale la forza di reazione dinamica al contatto del piede con il terreno non produce alcun momento nella direzione orizzontale, cioè il punto in… Punto di momento zero
Robot sferico Un robot sferico, noto anche come robot mobile sferico, o robot a forma di palla è un robot mobile con forma esterna sferica. Un robot sferico è generalmente costituito da un guscio sferico che funge da corpo del robot e un’unità di guida interna (IDU) che consente al robot di… Robot sferico
(English) Mobile robot Ci spiace, ma questo articolo è disponibile soltanto in Inglese Americano, Spagnolo Europeo, Tedesco, Francese, Portoghese Europeo, Russo, 中文, Giapponese, Arabo e Hindi.… (English) Mobile robot