ロボットアームは、通常はプログラム可能な機械アームの一種であり、人間の腕と同様の機能を有する。アーム…
産業用ロボットは、製造に使用されるロボットシステムです。産業用ロボットは自動化され、プログラマブルで…
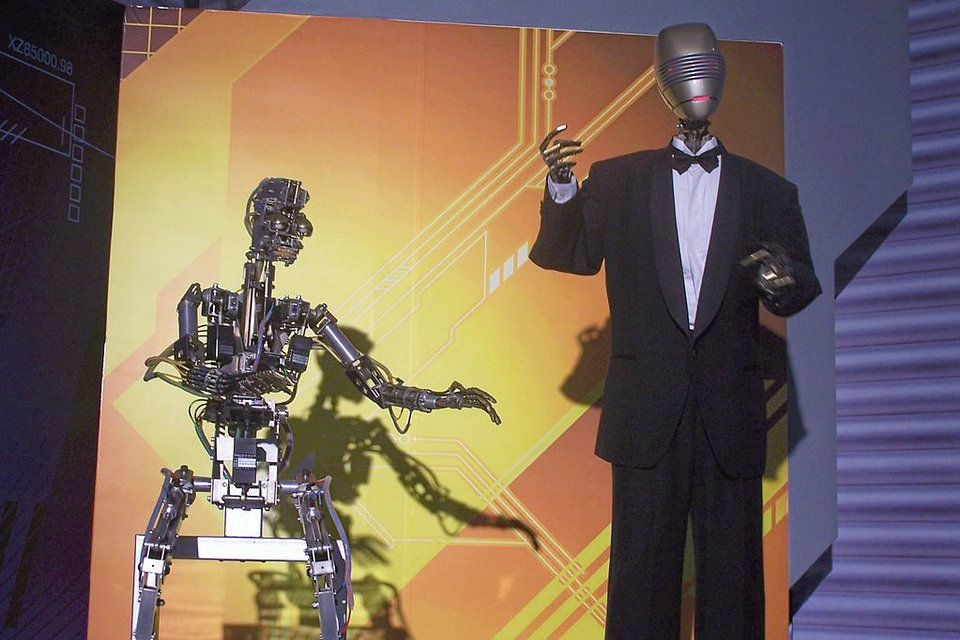
アニマトロニクスとは、人間や動物を模倣するためのケーブル引っ張り装置やモーターの使用、または他の方法…
Claytronicsは、ナノスケールのロボットとコンピュータサイエンスを組み合わせて、クレイトロニ…
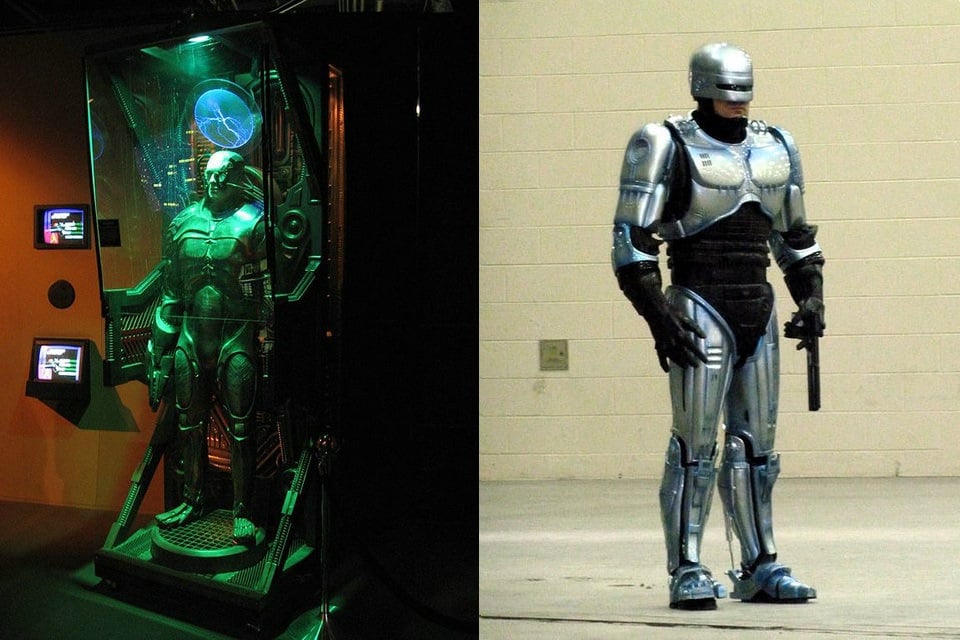
サイボーグ(「サイバネティック生物」の略)は、オーガニックとバイオメディカルの両方の身体部分を持つ存…
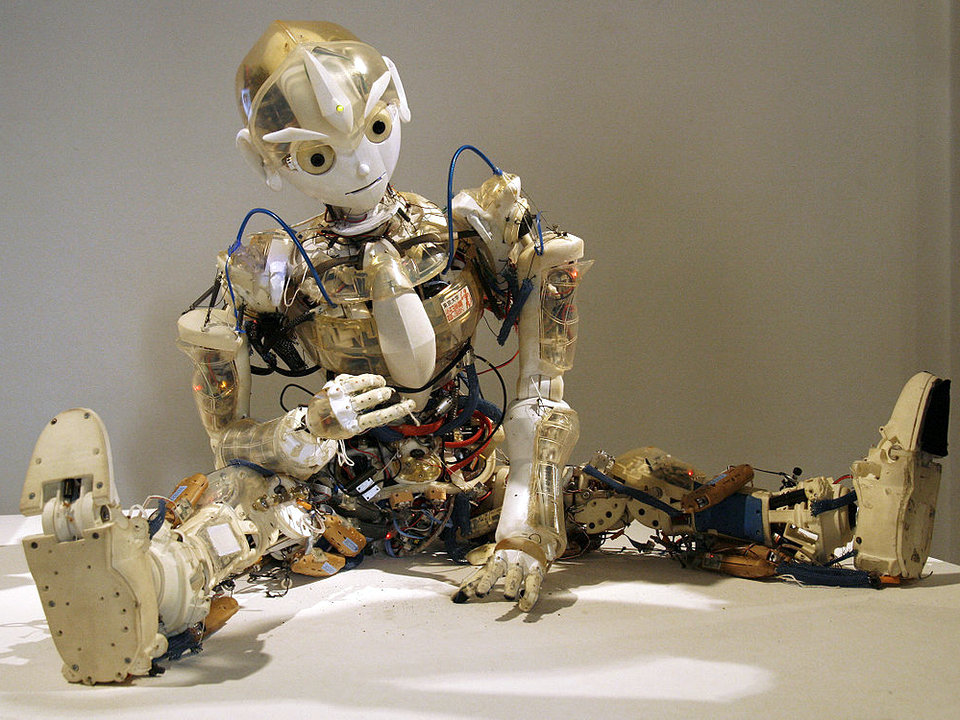
ヒューマノイドロボットは人体に似た体型のロボットです。設計は、人間の道具や環境との相互作用、実験目的…
ロボティクスの法律は、ある程度の自律性を持つように設計されたロボットの行動を支える基本的な枠組みとし…
ロボットは、特にコンピュータによってプログラム可能な機械であり、複雑な一連の動作を自動的に実行するこ…
ロボット競技は、ロボットが作業を達成する必要があるイベントです。通常、彼らは最高のものになるために他…
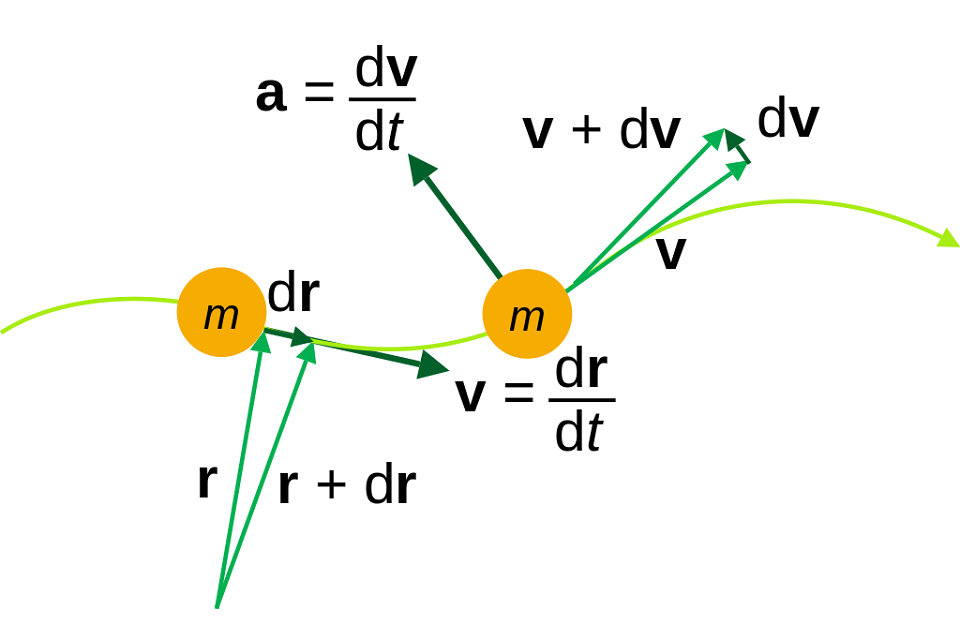
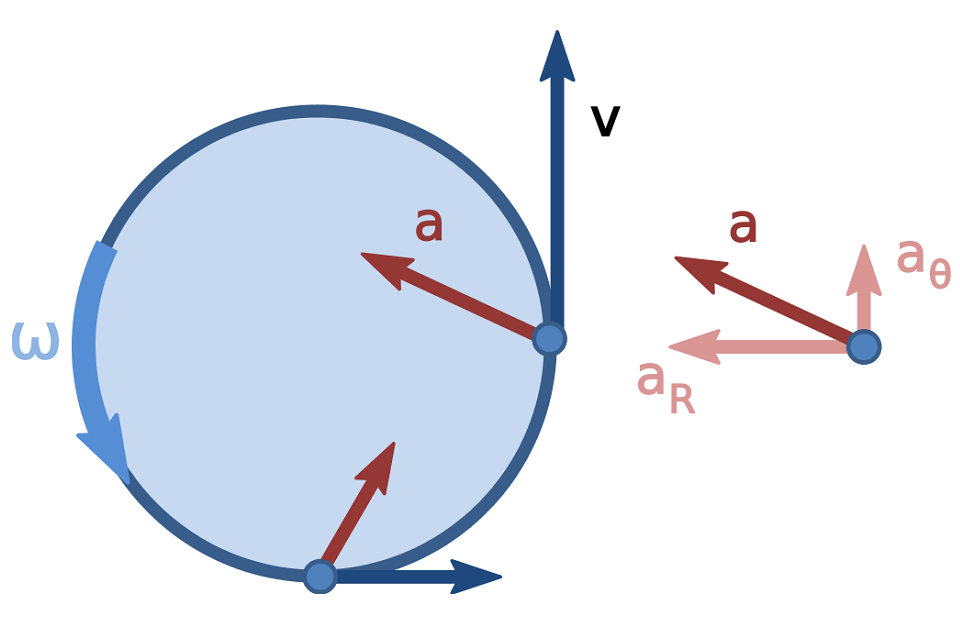
パーティクルキネマティクスは、パーティクルの軌道の研究です。 パーティクルの位置は、座標フレームの原…
キネマティクスは、起源の原因(力)を考慮せずに固体物体の動きを記述し、主に時間の関数における歴史の研…
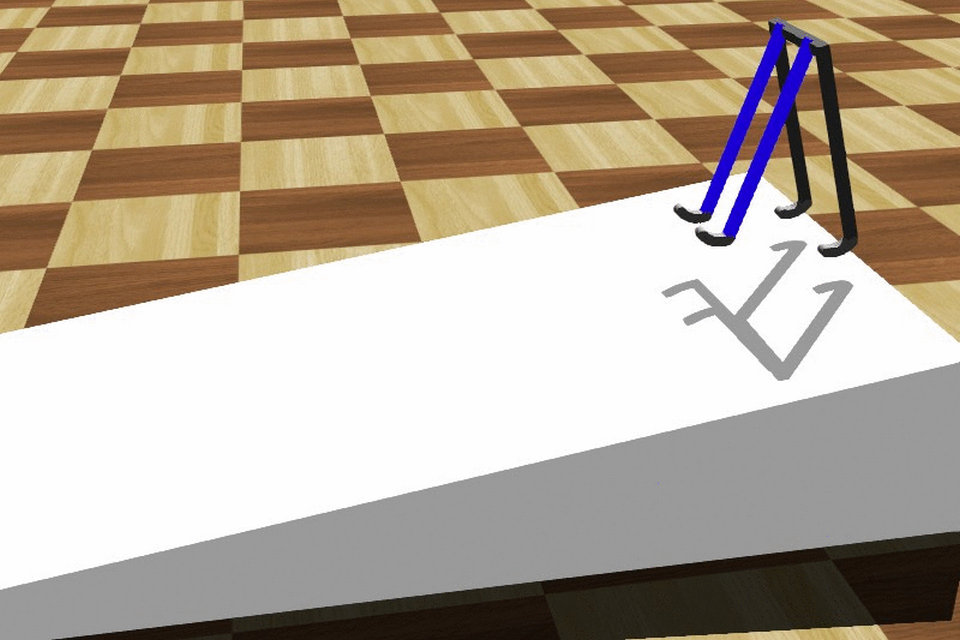
受動的動力学(Passive dynamics)とは、電源(例えば、バッテリ、燃料、ATP)からエネ…
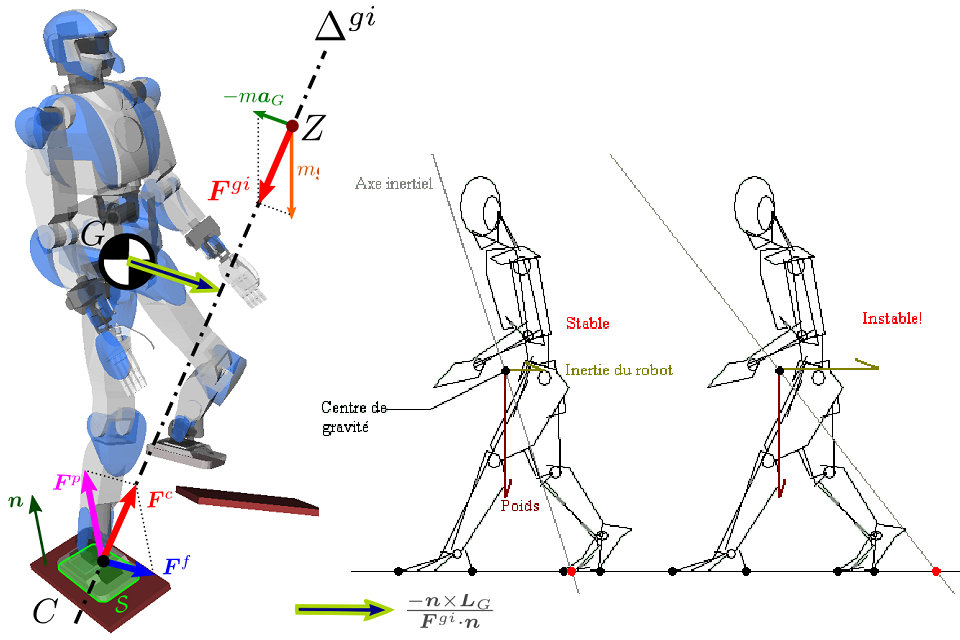
ゼロモーメントポイント(Zero moment point ZMP)は、例えばヒューマノイドロボット…
球形移動ロボットまたは球形ロボットとも呼ばれる球状ロボットは、球形の外形を有する移動ロボットである。…
移動ロボットは、移動が可能なロボットである。 モバイルロボットは、通常、ロボット工学と情報工学のサブ…