机器人手臂(Robotic arm)是一种机械臂,通常是可编程的,具有与人类手臂类似的功能; 臂可以…
工业机器人(Industrial robot)是用于制造的机器人系统。工业机器人是自动化的,可编程的…
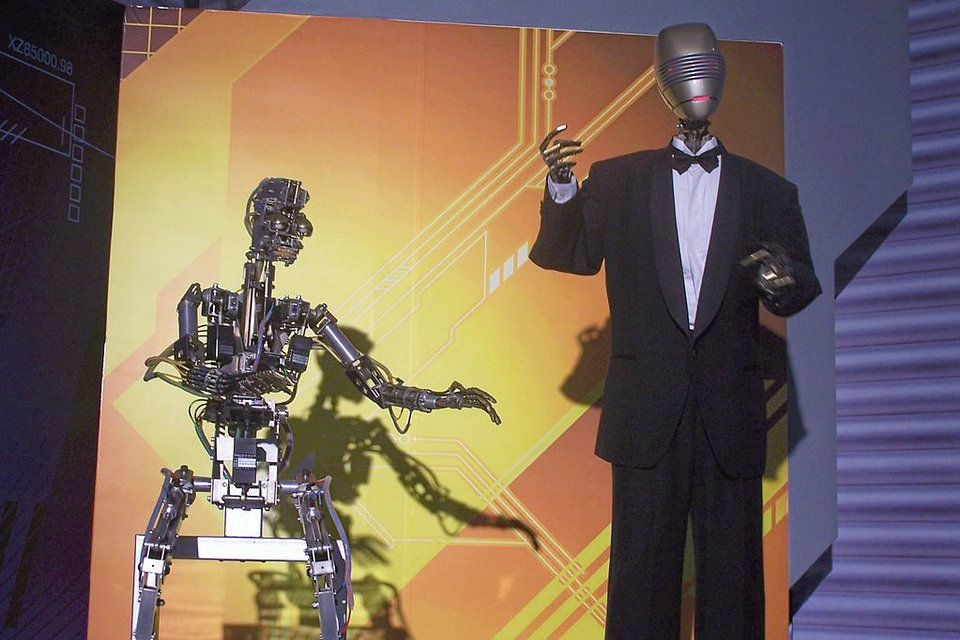
电子动画学或电动木偶技术(Animatronics)是指使用拉线装置或电动机模拟人或动物,或为其他无…
微型机器人或原子级机器人(Claytronics)是一个抽象的未来概念,它结合了纳米级机器人技术和计…
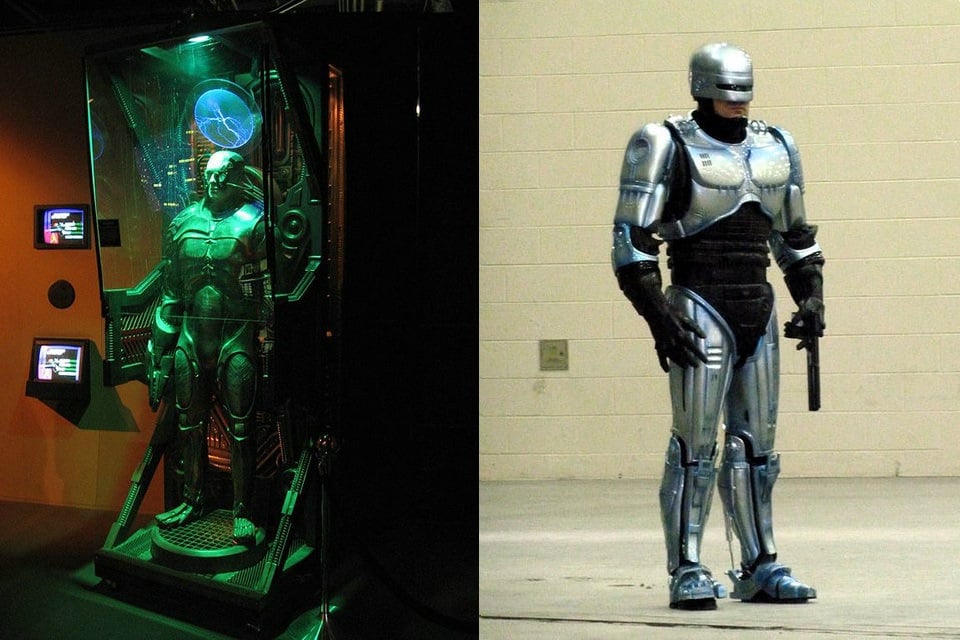
人造人或半机械人(Cyborg “cybernetic organism”的缩写)是一种有机体和生物…
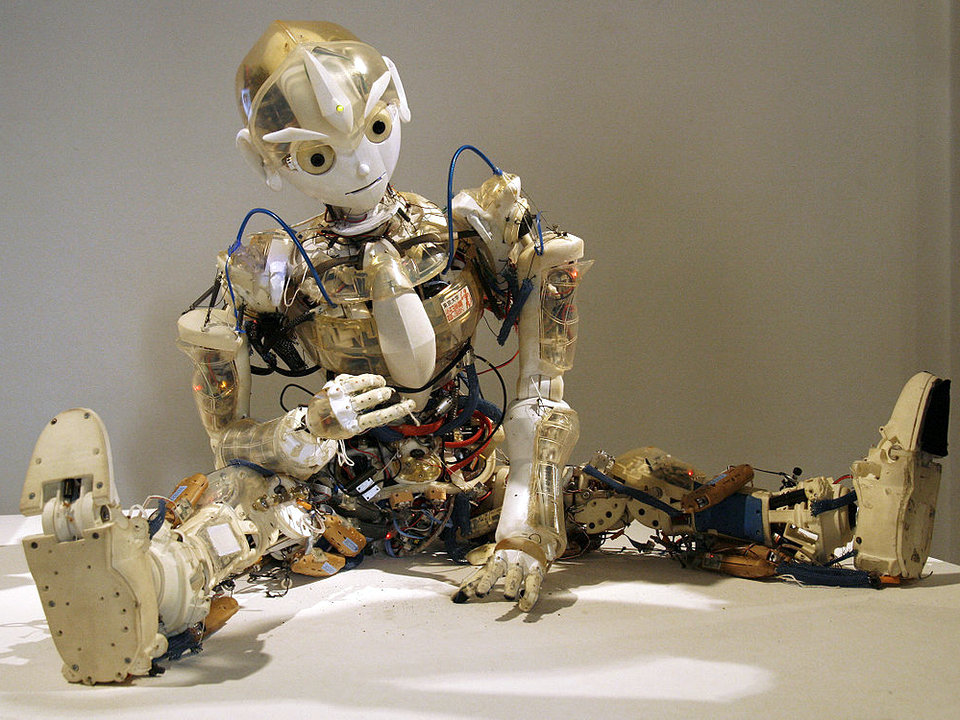
人形机器人是一种机身,其体形与人体相似。该设计可以用于功能目的,例如与人工具和环境的交互,用于实验目…
机器人法则(Laws of robotics)是一套法律,规则或原则,旨在作为支持机器人行为的基本框…
机器人(Robot)是机器 – 尤其是可由计算机编程的机器 – 能够自动执行…
机器人竞赛(Robot competition)是机器人必须完成任务的事件。通常他们必须击败其他机器…
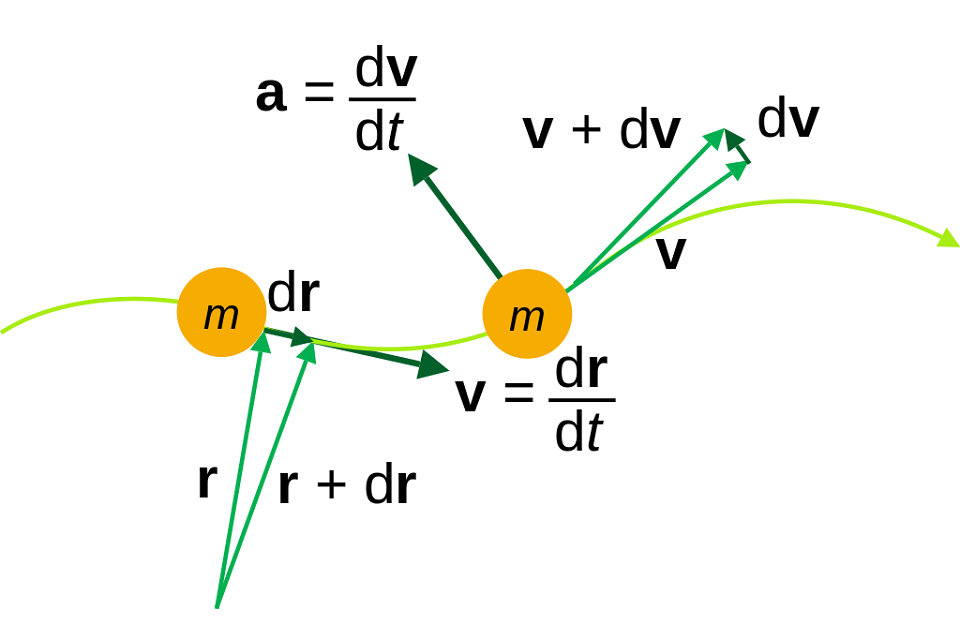
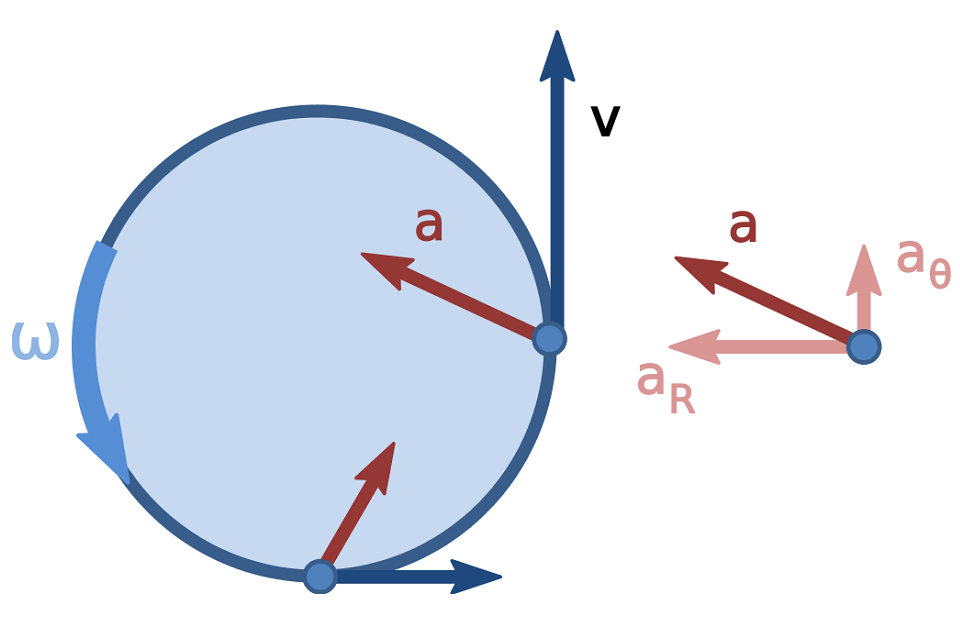
粒子运动学(Particle Kinematics)是研究粒子的轨迹。 粒子的位置定义为从坐标系的原…
运动学(Kinematics)是物理学的一个分支,它描述了固体物体的运动,而没有考虑起源的原因(力量…
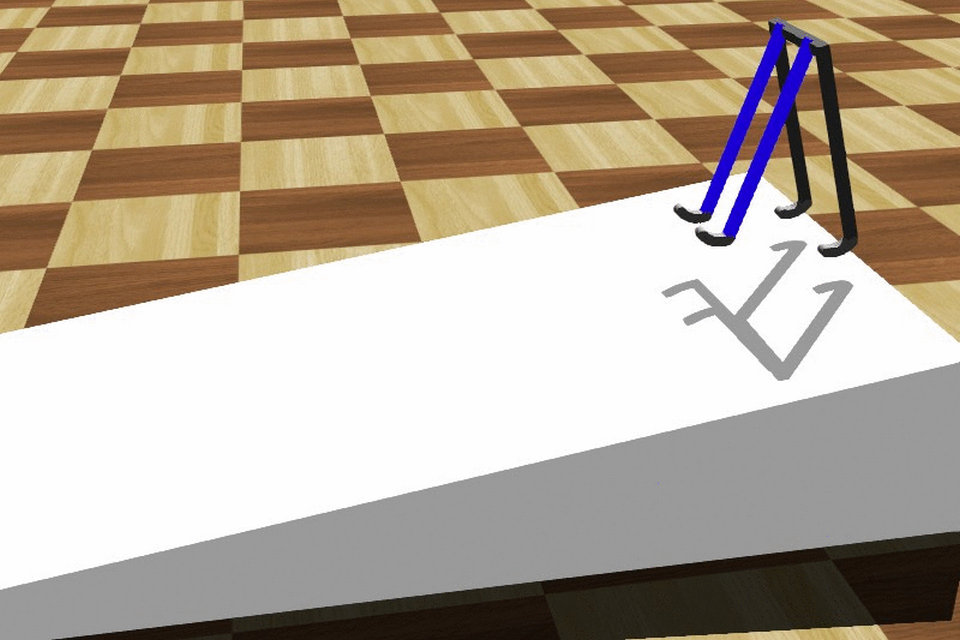
被动动力学(Passive dynamics)是指致动器,机器人或生物体在不从供应源(例如,电池,燃…
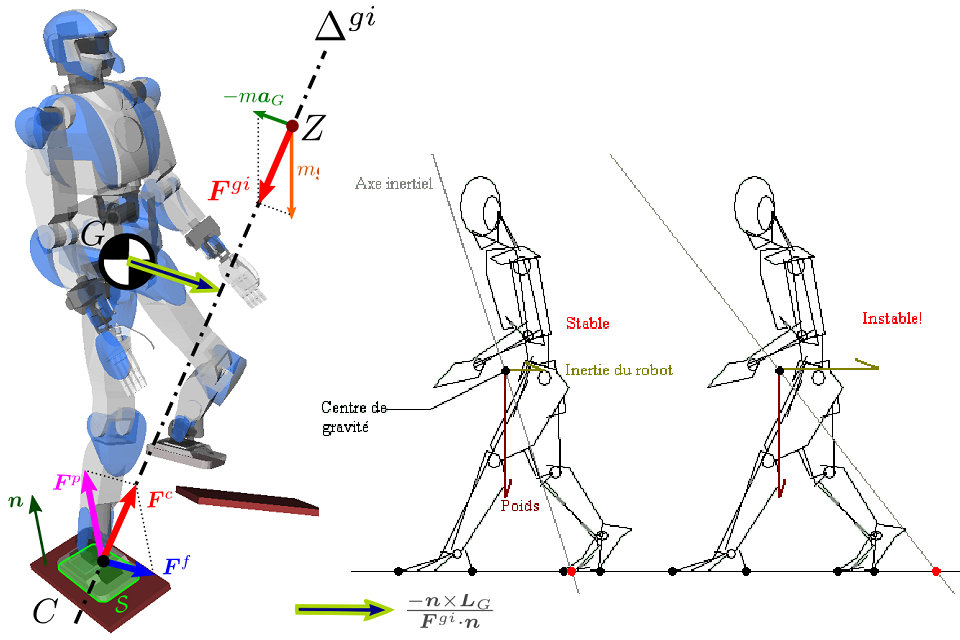
零力矩点(Zero moment point ZMP)是与腿部运动的动力学和控制相关的概念,例如,用…
球形机器人(Spherical robot),也称为球形移动机器人,或球形机器人,是一种球形外形的移…
移动机器人是能够移动的机器人。 移动机器人通常被认为是机器人和信息工程的子领域。 移动机器人具有在其…