Fused filament fabrication (FFF)은 열가소성 소재의 연속 필라멘트를 사용하는 3D 인쇄 프로세스입니다. 이것은 대형 코일에서 움직이는 가열 프린터 압출기 헤드를 통해 공급됩니다. 용융 된 재료는 프린트 헤드의 노즐 밖으로 밀려 나오고 성장하는 소재에 증착됩니다. 헤드는 컴퓨터 제어하에 이동되어 인쇄 된 모양을 정의합니다. 일반적으로 헤드는 한 번에 하나의 수평면을 배치하기 위해 2 차원으로 이동하면서 레이어를 이동하여 약간 위로 움직여 새 슬라이스를 시작합니다. 압출기 헤드의 속도는 또한 침착을 정지 및 개시하고 단면 사이에서 스트링 또는 드리 블링 (dribbling)없이 중단 된 평면을 형성하도록 제어 될 수있다. 퓨즈 드 필라멘트 제작은 RepRap 프로젝트의 구성원이 퓨즈 증착 모델링 (Fused Deposition Modeling : FDM)을 다루는 특허를 통해 법적으로 제약되지 않은 문구를 제공하기 위해 만들어졌습니다.
융합 필라멘트 인쇄는 이제 호기심 급 3D 인쇄를위한 (기계 수에 따라) 가장 보편적 인 프로세스입니다. 광중합 및 분말 소결과 같은 다른 기술은 더 나은 결과를 제공 할 수 있지만, 그 비용은 크게 증가합니다.
3D 프린터 헤드 또는 3D 프린터 압출기는 원료 용융을 담당하는 재료 압출 형 인쇄의 일부이며 연속 프로파일을 형성합니다. 아크릴로 니트릴 부타디엔 스티렌 (ABS), 폴리 락트산 (PLA), 고 충격 폴리스티렌 (HIPS), 열가소성 폴리 우레탄 (TPU), 지방족 폴리 아미드 (나일론) 및 최근 PEEK와 같은 열가소성 플라스틱을 포함하여 다양한 소재가 압출 성형됩니다. 세라믹스 및 초콜릿과 같은 페이스트 형 물질은 융합 된 필라멘트 공정 및 페이스트 압출기를 사용하여 압출 될 수있다.
소개
3D 인쇄라고도하는 첨가물 제조 (AM)는 층별로 재료를 증착하여 부품을 제조하는 것을 포함합니다. 재료 압출, 바인더 분사, 재료 분사 및 직접 에너지 증착을 포함하여 레이어별로 부품을 만들 수있는 다양한 AM 기술이 있습니다.
이 공정은 압출기의 다양한 유형을 가지며 재료 접근법의 층별 추가를 사용하여 최종 제품을 얻기 위해 다른 재료를 압출합니다. 3D Printer Liquefier는 재료 압출 형 인쇄에서 주로 사용되는 구성 요소입니다.
압출
재료 압출을 사용하는 3D 인쇄에서의 압출은 저온 단부 및 고온 단부를 포함한다.
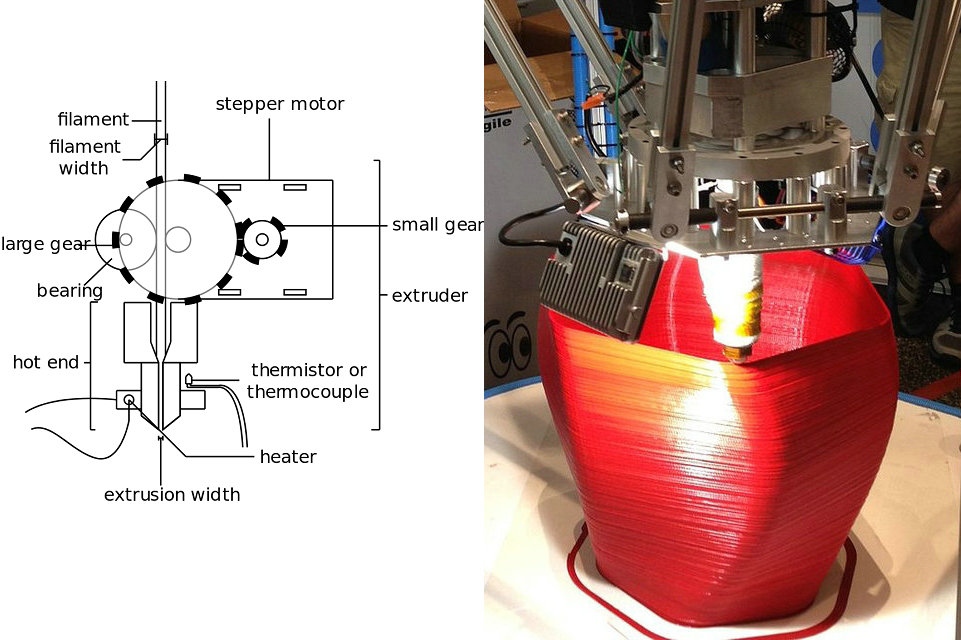
콜드 엔드는 압출기 시스템의 일부로 스풀에서 재료를 끌어 당겨 뜨거운 끝쪽으로 밀어냅니다. 저온 단부는 대부분 기어 또는 롤러 기반의 재료에 토크를 공급하고 스테퍼 모터를 사용하여 이송 속도를 제어합니다. 이를 통해 공정 속도가 제어됩니다.
핫 엔드는 필라멘트를 녹이는 3D 프린터의 액화 장치를 호스팅하는 활성 부분입니다. 용융 된 플라스틱이 작은 노즐에서 빠져 나올 때 재료에 달라 붙을 얇고 끈적 끈적한 플라스틱 비드를 형성합니다. 핫 엔드는 가열 챔버와 노즐로 구성됩니다. 팁 (노즐)의 구멍은 0.3mm와 1.0mm 사이의 직경을 갖습니다. 다양한 유형의 노즐 및 가열 방법이 인쇄 될 재료에 따라 사용됩니다.
어떤 유형의 3 차원 인쇄 기계는 가열 챔버가 없을 수도있는 다른 유형의 압출 시스템을 가질 수있다. 열은 다른 공급원으로부터 공급된다. 레이저.
기계의 나머지 부분에 xtruder 마운트
압출기가 나머지 기계에 장착되는 방식은 시간이 지남에 따라 비공식 장착 표준으로 진화했습니다. 이러한 비공식 표준에는 다음이 포함됩니다.
수직 X 축 표준
신속한 압출기 장착
OpenX 탑재
기타
이러한 요소 표준을 통해 기존의 프린터 프레임에서 새로운 압출기 설계를 테스트하고 기존 압출기를 사용하는 새로운 프린터 프레임 설계를 테스트 할 수 있습니다.
융착 모델링
융착 모델링 (FDM)은 Stratasys Inc.에 의해 상표 등록 된 모델링, 프로토 타이핑 및 생산 어플리케이션에 일반적으로 사용되는 첨가제 제조 (AM) 기술입니다. 3D 인쇄에 사용되는 기술 중 하나입니다. FDM은 소재를 레이어로 배치하여 “부가 적”원리로 작동합니다. 플라스틱 필라멘트 또는 금속 와이어는 코일로부터 풀려 부품을 생산하는 재료를 공급한다. 따라서 FDM은 고체 기반 AM 기술이라고도합니다.
역사
융착 모델링 (FDM)은 1980 년대 후반 S. Scott Crump에 의해 개발되었고 1990 년에 Stratasys에서 상용화되었습니다. 이 기술의 특허 US 5121329 A가 만료됨에 따라이 유형의 3D 프린터를 사용하는 상업용 및 DIY 변형뿐만 아니라 대규모 오픈 소스 개발 커뮤니티 (RepRap)가 있습니다. 이로 인해이 기술이 창안 된 이래로 2 배의 가격 하락이있었습니다.
방법
FDM은 STL 파일 (STereoLithography 파일 형식)을 처리하는 소프트웨어 프로세스로 시작하여 빌드 프로세스를 위해 모델을 수학적으로 분할하고 방향을 지정합니다. 필요한 경우 지원 구조가 생성 될 수 있습니다. 기계는 여러 가지 목표를 달성하기 위해 여러 가지 재료를 분배 할 수 있습니다.
하나의 재료를 사용하여 모델을 구축 할 수 있습니다.
가용성 구조로 다른 것을 사용하십시오.
동일한 모델에서 동일한 유형의 열가소성 색상을 여러 개 사용할 수 있습니다.
모델 또는 부품은 노즐에서 압출 직후 재료가 경화되면서 용융 된 재료의 작은 편평한 스트링을 압출하여 층을 형성함으로써 생산됩니다.
플라스틱 필라멘트는 코일에서 풀려 유체를 켜고 끌 수있는 압출 노즐에 재료를 공급합니다. 일반적으로 필라멘트를 노즐로 밀어 넣는 정확하게 제어되는 드라이브가 있습니다.
노즐을 가열하여 재료를 녹인다. 열가소성 수지는 유리 전이 온도를 지나서 충분히 가열 된 다음 압출 헤드로 증착됩니다.
노즐은 수치 제어 메커니즘에 의해 수평 및 수직 방향으로 움직일 수 있습니다. 이 노즐은 CAM (computer-aided manufacturing) 소프트웨어 패키지에 의해 제어되는 공구 경로를 따르며 부품은 한 번에 한 레이어 씩 아래에서 위로 구성됩니다. 스테퍼 모터 또는 서보 모터는 일반적으로 압출 헤드를 이동시키는 데 사용됩니다. 델타 보트 (deltabot)와 같은 다른 기계적 설계가 사용되었지만 사용 된 메커니즘은 흔히 X-Y-Z 직선 디자인입니다.
인쇄 기술 FDM은 매우 유연하며 하위 레이어의 지원으로 작은 오버행을 처리 할 수 있지만 FDM은 일반적으로 오버행의 경사에 대해 몇 가지 제한을 가지고 있으며 지원되지 않는 종유석을 생성 할 수 없습니다.
Acrylonitrile Butadiene Styrene (ABS), 폴리 락트산 (PLA), 폴리 카보네이트 (PC), 폴리 아미드 (PA), 폴리스티렌 (PS), 리그닌, 고무 등 다양한 재료가 있으며, 및 온도 특성. 또한, 주어진 열가소성 재료의 색상조차도 인쇄물의 강도에 영향을 줄 수 있습니다. 최근 독일 회사는 FDM 기술을 사용하여 세분화 된 PEEK를 필라멘트 형태로 가공하는 기술 가능성을 시연했습니다.
FDM 동안, 고온 용융 중합체는 공기에 노출된다. 질소 또는 아르곤과 같은 불활성 가스 분위기 내에서 FDM 공정을 작동시키는 것은 층 접착력을 상당히 증가시킬 수 있고 3D 인쇄물의 개선 된 기계적 성질을 유도 할 수있다. 선택적 레이저 소결 동안 산화를 방지하기 위해 불활성 가스가 일상적으로 사용됩니다.
일반 과정
압출기의 유동 형상, 가열 방법 및 비 뉴톤 유체의 용융 유동 거동은이 부분에서 주요 고려 사항입니다.
플라스틱 필라멘트는 상업적으로 판매되거나 가정용으로 제작 된 릴에서 공급되며 가열 된 액화 장치로 공급되어 용해됩니다. 이 용융물은 노즐에 의해 압출되고, 필라멘트는 여전히 고상으로 “플런저 (plunger)”의 역할을합니다.
노즐은 xy 평면에서 이동할 수있는 기계식 스테이지에 장착됩니다. 노즐이 소정의 형상으로 테이블 위로 이동함에 따라, 이전에 증착 된 기판 및 / 또는 도로와의 접촉시 빠르게 고형화되는 ‘도로’라고 불리는 압출 된 플라스틱의 얇은 비드를 증착시킨다.
단색 레이어는 둘러싸는 영역 경계 내에서 도로가 나란히 배치되는 래스터 화 모션을 따라 생성됩니다.
일단 층이 완성되면, 플랫폼은 z 방향으로 하강되어 다음 층을 시작한다. 이 과정은 물체의 제작이 완료 될 때까지 계속됩니다.
열 환경의 공정 제어에서 도로를 성공적으로 접합해야합니다. 따라서, 시스템은 챔버 내부에 유지되고, 증착되는 물질의 융점 바로 아래의 온도로 유지된다.
물리학
압출 동안 열가소성 필라멘트는 롤러로부터의 기계적 압력에 의해 액화 기 내로 도입되고, 여기서 용융되고 압출된다. 롤러는 재료 전달 시스템의 유일한 구동 메커니즘이기 때문에 필라멘트는 플런저 역할을하는 하류 측에서 압축력을 받고 롤러에 대한 인장 스트레스를받습니다. 따라서 압축 응력이 압출 공정의 원동력입니다.
용융물을 압출하는 데 필요한 힘은 시스템 전체의 압력 강하를 극복하기에 충분해야하며, 이는 용융물의 점성 및 액화 기 및 노즐의 유동 기하학에 따라 달라집니다. 용융 된 물질은 유동 중에 전단 변형을 겪습니다. Shear thinning 거동은 이러한 유형의 3D 인쇄에 사용되는 대부분의 재료에서 관찰됩니다. 이것은 일반화 된 Newtonian 유체에 대해 힘 률을 사용하여 모델링됩니다.
온도는 전기 코일 히터의 열 입력에 의해 조절됩니다. 시스템은 원하는 값과 열전쌍에 의해 검출 된 값 사이의 온도차에 따라 코일에 공급되는 전력을 지속적으로 조절하여 음의 피드백 루프를 형성합니다. 이것은 원통형 파이프의 열 유량과 유사합니다.
상업용 애플리케이션
신속한 프로토 타이핑의 중요한 형태 인 FDM은 프로토 타이핑 및 신속한 제조에 사용됩니다. 신속한 프로토 타이핑은 반복 테스트를 용이하게하며, 매우 짧은 실행 시간에 신속한 제조는 상대적으로 저렴한 대안이 될 수 있습니다.
FDM은 열가소성 PLA, ABS, ABSi, 폴리 페닐 설폰 (PPSF), 폴리 카보네이트 (PC), PETG 및 Ultem 9085 등을 사용합니다. 이 재료는 내열성을 위해 사용됩니다. Ultem 9085는 또한 항공 우주 및 항공 분야에 적합한 화재 방지제를 전시합니다.
FDM은 또한 의학 조직 공학 응용을위한 발판을 프로토 타이핑하는 데 사용됩니다.
무료 애플리케이션
여러 프로젝트와 회사들이 가정용 데스크톱 용 저렴한 3D 프린터를 개발하기 위해 노력하고 있습니다. 이 작업의 대부분은 DIY / 열광적 인 / 얼리 어답터 커뮤니티를 중심으로 이루어졌으며 학계 및 해커 커뮤니티와 긴밀한 관계가 있습니다.
RepRap은 데스크톱 카테고리에서 가장 오래 실행되는 프로젝트 중 하나입니다. RepRap 프로젝트는 GNU GPL (General Public License)에 따라 전체 사양이 공개되고 더 많은 것을 만들기 위해 자체 플라스틱 부품의 많은 부분을 인쇄하여 복제 할 수있는 무료 오픈 소스 하드웨어 (FOSH) 3D 프린터를 제작하는 것을 목표로합니다. 기계. RepRaps는 이미 회로 기판과 금속 부품을 인쇄 할 수있는 것으로 나타났습니다.
Fab @ Home은 DIY 3D 프린터를위한 다른 오픈 소스 하드웨어 프로젝트입니다.
RepRap의 FOSH 목표로 인해 많은 관련 프로젝트가 관련 디자인 또는 파생 3D 프린터의 생태계를 만드는 영감을 얻기 위해 디자인을 사용했으며 대부분이 오픈 소스 디자인이기도합니다. 이러한 오픈 소스 디자인의 가용성은 3D 프린터의 변형이 쉽게 만들어 낼 수 있음을 의미합니다. 그러나 프린터 디자인의 품질과 복잡성, 키트 또는 완제품의 품질은 프로젝트마다 크게 다릅니다. 오픈 소스 3D 프린터의 이러한 급속한 발전은 하이퍼 커스터마이징과 퍼블릭 도메인 디자인을 사용하여 오픈 소스 적절한 기술을 제작할 수 있기 때문에 많은 분야에서 관심을 얻고 있습니다. 이 기술은 또한 기술이 지역 사회가 이용할 수있는 자원으로 쉽고 경제적으로 만들어지기 때문에 지속 가능한 발전에 대한 이니셔티브를 도울 수 있습니다.
3D 프린터 비용
3D 프린터의 비용은 2010 년경 이후 급격히 감소했습니다. 이전에는 20,000 달러였던 기계가 1,000 달러 미만이었습니다. 예를 들어, 2017 년 현재 여러 회사와 개인이 다양한 RepRap 디자인을 구축하기 위해 부품을 판매하고 있으며 가격은 약 £ 99 / US $ 100에서 시작합니다. 최고의 판매용 데스크탑 FDM 프린터 인 Prusa i3 MK2는 자체 조립 키트로 900 달러 또는 600 달러의 비용이 든다.
오픈 소스 Fab @ Home 프로젝트는 초콜렛에서 실리콘 밀봉 제 및 화학 반응물에 이르기까지 노즐을 통해 압출 성형 할 수있는 일반적인 용도의 프린터를 개발했습니다. 프로젝트의 디자인을 따르는 프린터는 2012 년부터 키트 또는 사전 조립 된 형태의 공급 업체에서 2000 달러 가격으로 구입할 수 있습니다.
Aleph Objects가 제조 한 LulzBot 3D 프린터는 융착 모델링 기술의 오픈 소스 애플리케이션의 또 다른 예입니다. LulzBot 라인의 플래그쉽 모델 인 TAZ 프린터는 RepRap Mendel90 및 Prusa i3 모델의 설계에 영감을 불어 넣습니다. LulzBot 3D 프린터는 현재 Free Software Foundation에서 “Respects Your Freedom”인증을 획득 한 유일한 프린터입니다.
2018 년 9 월 현재 RepRap 스타일 프린터는 Amazon 및 eBay와 같은 온라인 소매 업체를 통해 키트 형태로 즉시 제공됩니다. 이 키트는 테스트 용 인쇄용 전자 파일과 소량의 PLA 필라멘트를 포함하여 작동하는 프린터를 만드는 데 필요한 모든 부품을 갖추고 있습니다. 이 종류의 인기있는 프린터 중 하나 인 Anet A8은 200 달러 이하의 가격으로 조립되었을 때 쉽게 인쇄 할 수 있습니다. 조립 프로세스는 총 6 ~ 8 시간이 소요되며 YouTube와 같은 동영상 사이트에 잘 설명되어 있습니다.
개발
고객 중심의 제품 맞춤화와 비용 및 시간 절약에 대한 요구로 인해 제조 프로세스의 민첩성에 대한 관심이 높아졌습니다. 이로 인해 RP 기술 및 특히 용착 증착 모델링이 개선되었습니다. 압출기 개발은 RepRap과 같은 제품으로 인해 발생하는 오픈 소스 3-D 프린터 이동 때문에 빠르게 진행되고 있습니다. 일관된 개선은 액화 기의 가열 온도 증가, 공정의 전반적인 제어 및 정밀도 및 도자기를 비롯한 다양한 인쇄물에 대한 개선 된 지원으로 나타납니다.
압출기가 기계에 장착되는 방식은 시간이 지남에 따라 비공식 장착 표준으로 진화했습니다. 이러한 비공식 표준에는 Vertical X Axis Standard, Quick-fit 압출기 장착부, OpenX 장착부 등이 포함됩니다.
프린트 헤드 운동학
퓨즈 필라멘트 프린터의 대부분은 동일한 기본 디자인을 따릅니다. 평판은 인쇄 공작물의 시작점으로 사용됩니다. 위의 갠트리는 움직이는 프린트 헤드를 가지고 있습니다. 갠트리 설계는 주로 수평 X 및 Y 방향으로 이동하도록 최적화되어 있으며 조각이 인쇄 될 때 Z 방향으로 느리게 상승합니다. 스테퍼 모터는 리드 스크류 또는 톱니 형 벨트 드라이브를 통해 이동을 구동합니다. X, Y 드라이브 용 톱니 벨트와 Z 용 리드 스크류를 사용하는 것은 일반적으로 이동 속도의 차이로 인해 발생합니다. 일부 기계는 갠트리에서 X 축 이동을하지만 Y (즉, 인쇄 작업) 레이저 커터와 달리 헤드 이동 속도가 낮기 때문에 스테퍼 모터가 보편적으로 사용되기 때문에 서보 모터를 사용할 필요가 없습니다.
원래 RepRap 프로젝트의 영향을받은 많은 프린터는 3D 인쇄 된 구성 요소를 자체적으로 구성하여 광범위하게 사용합니다. 이들은 일반적으로 다양한 각도의 구멍이있는 인쇄 된 커넥터 블록이며 값싼 스틸 나 사봉으로 결합됩니다. 이것은 저렴하고 조립하기 쉬운 구조를 만들어 주며 수직이 아닌 프레임 조인트를 쉽게 허용하지만 3D 프린터에 대한 액세스가 필요합니다. 이와 같은 ‘부트 스트랩 핑 (bootstrapping)’3D 프린터의 개념은 RepRap 디자인에서 독창적 인 주제였습니다. 막대의 강성이 부족한 경우 삼각 측량이 필요하거나 인쇄시 굴곡 진동하는 갠트리 구조의 위험이있어 인쇄 품질이 저하됩니다.
많은 기계가 이제 레이저 절단 합판, 플라스틱 또는 프레스 강판의 상자와 같은 반 밀폐 프레임을 사용합니다. 이들은 값 싸고 단단하며 둘러싸인 인쇄 볼륨의 기초로도 사용할 수 있으므로 인쇄 작업의 뒤틀림을 제어하기위한 온도 제어가 가능합니다.
극소수의 기계가 대신 극좌표를 사용합니다. 대개 원형 대칭을 사용하여 객체를 인쇄하도록 최적화 된 기계입니다. 이들은 방사형 갠트리 운동과 회전 운동을합니다. 중공 실린더를 인쇄하기위한이 설계에는 잠재적 인 기계적 이점이 있지만, 인쇄 기획에 대한 다른 기하학 및 그 결과가 아닌 주류 접근 방식은 아직 대중화되지 못하고 있습니다. 로봇의 모션 계획이 데카르트 좌표에서 극 좌표로 변환하는 것은 쉬운 일이지만이 디자인에서 이점을 얻으려면 인쇄 분할 알고리즘이 처음부터 회전 대칭을 인식해야합니다.
Rostock 프린터
델타 로봇 메커니즘을 기반으로 한 ‘Rostock’패턴 프린터로는 다른 접근 방식이 사용됩니다. 이들은 3 개의 무장 델타 로봇이 상단에 장착 된 커다란 열린 인쇄 부피를 가지고 있습니다. 이 로봇 설계는 낮은 관성과 큰 볼륨에서 빠르게 움직일 수있는 능력으로 유명합니다. 스핀들 팔 끝에 무거운 프린트 헤드를 움직일 때의 안정성과 진동으로부터의 자유는 기술적 도전입니다. 이 디자인은 크고 무거운 갠트리없이 큰 인쇄물을 얻는 수단으로 주로 선호되었습니다.
프린트 헤드가 스토리지 코일에서 헤드까지 필라멘트의 거리를 이동함에 따라 필라멘트에 생성 된 장력은 인쇄 품질에 영향을주지 않도록 극복하기위한 또 다른 기술적 과제입니다.