机器人的历史源于古代世界。 随着工业革命的开始,现代概念开始发展,这允许使用复杂的技术,并随后引入电力。 这使得可以用小型紧凑型电机为机器供电。 在20世纪初,人类机器的概念得到了发展。 今天,人们可以设想具有近乎人类思想和运动能力的人类机器人。
现代机器人的第一次使用是在工厂中作为工业机器人 – 简单的固定机器,能够制造任务,允许生产,减少对人类援助的需求。 自2000年代以来,已经建造了使用人工智能的数字控制工业机器人和机器人。
早期的传说
人工仆人和同伴的概念至少可以追溯到卡德摩斯的古老传说,据说他们已经播下了变成士兵的龙牙和皮加马里翁的雕像。 许多古代神话中都包括人造人,例如希腊神赫菲斯托斯(火神到罗马人)用金子建造的谈话机械女仆,犹太传说中的粘土傀儡和北欧传说中的粘土巨人。
在希腊神话中,赫菲斯托斯创造了可以在自己的力量下移动的实用三脚桌,以及为克里特岛辩护的青铜人塔洛斯。 Talos最终被Medea摧毁,Medea在他的单根导线上投下一道闪电。 为了拿走金羊毛,杰森也被要求用青铜蹄驯服两个喷火的公牛; 就像卡德摩斯一样,他将龙的牙齿播种成士兵。
印度Lokapannatti(11世纪/ 12世纪)讲述了Magadha国王Ajatashatru的故事,他收集了佛陀的遗物并将它们隐藏在地下佛塔中。 这些遗物受到罗马visaya王国的机械机器人(bhuta vahana yanta)的保护,直到他们被阿育王国王解除武装。 在埃及的罗西尔传说中,赛斯的弟弟创造了一座宫殿和一座坟墓,里面装有自主雕像,这些雕像生活在男人的生活中,如此逼真,以至于他们被误认为有灵魂。
受到欧洲基督教传说的启发,中世纪的欧洲人设计了无耻的头脑,可以回答他们提出的问题。 阿尔伯特斯马格纳斯应该构建了一个完整的机器人,可以执行一些国内任务,但它被阿尔伯特的学生托马斯阿奎那摧毁了他的思想。 最着名的传说是Roger Bacon设计的青铜头,在他错过了操作时刻后被摧毁或报废。 类似于人类或动物的自动机在中世纪文学的想象世界中很受欢迎。
自动机
机械自动机建于公元前10世纪的西周。 工匠严实制作了可以唱歌跳舞的人形自动机。 据说这台机器拥有栩栩如生的器官,如骨骼,肌肉和关节。 宇宙发动机是一座10米(33英尺)的钟楼,由苏松在中国开封于1088年建造,其特色是机械人体模型,用于敲响小时,敲响锣或铃铛等装置。 自动化的兴起持续到唐代。 马大凤为女王建造了一个自动梳妆台仆人。 尹文亮建造了一个自动人,他提议在宴会上举杯祝酒,还有一个木制的女人自动机。 中国古代有史以来最好的自动机是汉志乐,一位在公元前9世纪初移居中国的日本人。
在公元前4世纪,塔伦图姆的数学家Archytas假定他称之为“鸽子”的机械鸟,它被蒸汽驱动。 另一个早期的自动机是Clepsydra,由公元前250年由Ctesibius of Alexandria制造,他是埃及托勒密的物理学家和发明家。 亚历山大的英雄(公元10 – 70年)在自动机领域做了许多创新,其中包括一个据说可以发言的创新。 亚里士多德在荷马的“政治”(约公元前322年,第1部分,第4部分)中推测了早期对荷马的“伊利亚特”的提及,他认为自动化有朝一日可以通过废除奴隶制来实现人类平等:
只有一种情况我们可以想象管理者不需要下属,主人不需要奴隶。 这种情况可能是每个乐器都可以按照指挥或智能预期来完成自己的工作,比如代达罗斯的雕像或赫菲斯托斯制作的三脚架,荷马所说的“他们自己的动作是他们进入议会的秘密会议”。奥林匹斯山上的众神“,好像梭子应该编织自己,而拨子应该自己弹奏竖琴。
Al-Jazari(1136-1206)是Artuqid王朝时期的穆斯林发明家,他设计并建造了许多自动机器,包括厨房用具和由水驱动的音乐自动机。 一个特别复杂的自动机包括四个浮在湖面上的自动音乐家。
在12世纪文艺复兴时期,英雄的自动机作品被翻译成拉丁文。 13世纪早期的艺术家 – 工程师Villard de Honnecourt概述了几个自动机的计划。 在13世纪末,阿图瓦伯爵罗伯特二世在他位于Hesdin的城堡建造了一个游乐园,其中包含了许多机器人,人形机器人和动物。
最早可验证的自动化是莱昂纳多达芬奇(1452-1519)在1495年左右绘制的人形机器人。莱昂纳多的笔记本在20世纪50年代被重新发现,其中包含一个机械骑士装甲的详细图纸,能够坐起来,挥动手臂和移动它的头和下巴。 1533年,JohannesMüllervonKönigsberg创造了一只由铁制成的自动鹰和苍蝇; 两者都可以飞 John Dee也因创造一种能够飞行的木甲虫而闻名。
17世纪的思想家勒内·笛卡尔认为,动物和人类都是生物机器。 在他最后一次去挪威旅行时,他带着一个看起来像他死去的女儿弗朗辛的机械娃娃。 在18世纪,主要的玩具制造商Jaques de Vaucanson为路易十五建造了一个自动化的鸭子,里面有数百个可以吃喝的活动部件。 Vaucanson随后建造了人形机器人,鼓手和横笛演奏者因其与真人类的解剖学相似性而闻名。 Vaucanson的创作激发了欧洲制表师制造机械自动机的能力,并成为欧洲贵族中收藏复杂的娱乐机械设备的时尚。 17世纪70年代,瑞士皮埃尔·雅克 – 德罗兹(Pierre Jaquet-Droz)创造了看起来像儿童的移动自动机,让玛丽·雪莉(Mary Shelly)感到高兴,后者继续写弗兰肯斯坦:现代普罗米修斯。 自动化的最终尝试是Wolfgang von Kempelen的The Turk,这是一台能够与人类对手下棋并参观欧洲的精致机器。 当机器被带到新的世界时,它促使Edgar Allan Poe写了一篇文章,其中他断定机械装置不可能推理或思考。
日本工匠Hisashige Tanaka,被称为“日本的爱迪生”,创造了一系列非常复杂的机械玩具,其中一些可以提供茶叶,箭袋中的火箭,甚至还可以画出日本汉字。 具有里程碑意义的文字Karakuri Zui(插图机械)于1796年出版。
现代史
1900年
在“绿野仙踪”一书中,机器人被称为“机械人”。 一个着名的角色是锡樵夫,一个用锡制成的人,在奥兹森林砍伐树木。
20世纪10年代
第一个类人机器人是一个带小号的士兵,由德国德累斯顿的Friedrich Kaufmann于1910年制造。 在第一次世界大战期间,根据尼古拉·特斯拉(Nikola Tesla)的工作使用了遥控武器,他们制造了一种可以通过无线电远程控制的电动船。
20世纪20年代
“机器人”一词最早出现在捷克卡雷尔Čapek于1920年出版的一部剧中.RUR(罗森的万能机器人)是一部讽刺作品,机器人是制造生物生物,可以完成所有不愉快的体力劳动。 根据Čapek的说法,这个词是由他的兄弟Josef从捷克robota创造的,意思是奴役。 播放RUR,取代了流行使用“自动机”这个词。 然而,直到20世纪50年代,“机器人”在电影,广播和电视节目中被称为“robit”[澄清需要]:例如1959年11月15日播出的电视连续剧“The Twilight Zone”中的“The Lonely”剧集,以及科幻电台节目“X Minus One”。
西屋电气公司于1926年建造了Televox; 它是一个纸板切口,连接到用户可以打开和关闭的各种设备。 1927年,弗里茨朗的大都会被释放; Maschinenmensch(“机器人”),一个名为“Parody”,“Futura”,“Robotrix”或“Maria impersonator”(由德国女演员Brigitte Helm扮演)的妖怪人形机器人,是有史以来第一个被描绘在电影上。
最着名的日本机器人自动机在1927年向公众展示.Gakutensoku被认为具有外交作用。 通过压缩空气驱动,它可以流畅地写入并抬起眼睑。许多机器人是在计算机控制的伺服机构出现之前建造的,用于大公司的公共关系目的。 这些基本上是机器,可以执行一些特技,如18世纪的自动机。 1928年,最早的人形机器人之一在伦敦模特工程师协会年度展览会上展出。 由WH理查兹发明的机器人名叫埃里克 – 由一套带有十一个电磁铁的铝制装甲和一个由12伏电源供电的电机组成。 机器人可以移动手和头,可以通过遥控或语音控制来控制。
20世纪30年代
1939年,名为Elektro的人形机器人出现在世界博览会上。 身高7英尺(2.1米),重265磅(120公斤),它可以通过语音指令行走,讲700字(使用78转/分钟的唱机),抽烟,吹气球,移动头部和手臂。 车身由钢制齿轮凸轮和由铝皮覆盖的电机骨架组成。
1939年,Konrad Zuse建造了第一台可编程机电计算机,为现在被认为是机器人的人形机器的建造奠定了基础。
20世纪40年代
1941年和1942年,艾萨克·阿西莫夫制定了“机器人三法则”,并在此过程中创造了“机器人”这个词。 1945年,范内瓦·布什发表了“我们正在思考”这篇研究电子数据处理潜力的文章。 他预测计算机,数字文字处理器,语音识别和机器翻译的兴起。 他后来被超文本的发明者泰德纳尔逊称赞。 1948年,诺伯特·维纳(Norbert Wiener)制定了控制论的原理,这是实用机器人的基础。
第一个具有复杂行为的电子自主机器人是由英国布里斯托尔的Burden神经学研究所的威廉·格雷·沃尔特于1948年和1949年创建的。他想证明少数脑细胞之间的丰富联系可能导致非常复杂的行为 – 基本上,大脑如何工作的秘诀在于如何连接。 他的第一个机器人,名叫埃尔默和埃尔西,建于1948年至1949年之间,由于它们的形状和缓慢的移动速度,它们经常被描述为“乌龟”。 三轮乌龟机器人具有趋光性,当他们用电池电量不足时,他们可以找到充电站。
沃尔特强调了使用纯模拟电子技术模拟大脑过程的重要性,当时他的同时代人如阿兰图灵和约翰冯诺依曼都在转向数字计算方面的心理过程。 沃尔特的工作启发了后来的罗奇尼布鲁克斯,汉斯莫拉维克和马克蒂尔登等机器人研究人员。 沃尔特“海龟”的现代化身可以以BEAM机器人的形式出现。
20世纪50年代
1951年,沃尔特发表了一篇论文A Machine,通过展示条件反射学习,学习并记录了他的先进机械机器人如何充当智能代理。 第一个数字操作和可编程机器人是George Devol于1954年发明的,被称为Unimate。 这后来奠定了现代机器人产业的基础。
在日本,机器人成为流行的漫画人物。 机器人成为了文化偶像,日本政府被激励为机器人研究提供资金。 其中最具代表性的角色是Astro Boy,他讲授爱情,勇气和自我怀疑等人类感受。 在文化方面,日本的机器人被视为人类同行的帮助者。
20世纪60年代
Devol于1960年将第一辆Unimate卖给了通用汽车,并于1961年在新泽西州尤因乡的一家工厂安装,用于从压铸机中提升热金属片并将它们放入冷却液中。 “没有任何大张旗鼓,世界上第一台工作机器人于1961年春天加入位于尤因乡的通用汽车工厂的装配线……这是一个自动压铸模具,下降了红热门把手和其他这样的汽车将零件放入一条冷却液池中,然后将它们移到工人身上进行修剪和抛光。“ Devol的第一个数字操作可编程机器人手臂专利代表了现代机器人行业的基础。
Rancho Arm是一个机械臂,用于帮助加利福尼亚州唐尼的Rancho Los Amigos医院的残疾患者; 这台计算机控制的手臂于1963年被斯坦福大学收购。1967年,第一台工业机器人在日本投入生产。 Versatran机器人由American Machine and Foundry开发。 一年后,Unimation的液压机器人设计由川崎重工投入生产。 Marvin Minsky于1968年创建了Tentacle Arm; 手臂由计算机控制,其12个关节由液压驱动。 1969年,机械工程系学生Victor Scheinman创建了Stanford Arm,被认为是第一台电子计算机控制的机械臂(Unimate的指令存放在磁鼓上)。
在20世纪60年代后期,越南战争成为自动化指挥技术和传感器网络的试验场。 1966年,提出了麦克纳马拉线,目的是几乎不需要地面部队。 由于成本高,这种地震和声学传感器,光探测和传感器触发的地雷的传感器网络仅部分实施。 Shakey是第一个能够推理周围环境的移动机器人,由斯坦福研究所(现为SRI International)于1970年建造。 Shakey将多个传感器输入组合在一起,包括电视摄像机,激光测距仪和“碰撞传感器”,以便进行导航。
20世纪70年代
在20世纪70年代早期,开发了精确弹药和智能武器。 武器通过实施终端指导变得机器人。 在越南战争结束时,部署了第一枚激光制导炸弹,可以通过跟踪指向目标的激光束找到目标。 在1972年操作线卫激光制导炸弹的证明有效,但仍然严重依赖人类操作员。 在即将结束的越南战争中,火灾和遗忘武器也首次被部署,一旦发射,运营商就不需要进一步关注或采取行动。
日本机器人科学家在20世纪70年代大力推动人形机器人的发展。 早稻田大学于1967年启动了WABOT项目,并于1972年完成了WABOT-1,这是世界上第一个全尺寸人形智能机器人。 它的肢体控制系统允许它与下肢一起行走,并使用触觉传感器用手抓住和运输物体。 它的视觉系统允许它使用外部感受器,人工眼睛和耳朵测量物体的距离和方向。 它的会话系统允许它用日语与一个人工嘴交流。 这使它成为第一个android。
Freddy和Freddy II是由Pat Ambler,Robin Popplestone,Austin Tate和Donald Mitchie在爱丁堡大学信息学院建造的机器人,能够在几个小时内组装木块。 德国KUKA公司建造了世界上第一台带有六个机电驱动轴的工业机器人,称为FAMULUS。
1974年,大卫·西尔弗(David Silver)设计了“银色手臂”(Silver Arm),它能够复制人手。 反馈由触摸和压力传感器提供,并由计算机分析。 SCARA,选择性合规装配机器人臂,创建于1978年,是一个高效的4轴机械臂。 最好用于拾取零件并将它们放置在另一个位置,SCARA于1981年被引入装配线。
1979年,斯坦福购物车成功地穿过了一间充满椅子的房间。它主要依靠立体视觉来导航和确定距离。 卡内基梅隆大学机器人研究所由Raj Reddy于1979年创立。
20世纪80年代
Takeo Kanade于1981年创造了第一个“直接驱动臂”。这是第一款同类型的手臂电机包含在机器人内部,消除了长时间的传动。
1984年发布了Wabot-2; 能够演奏管风琴的Wabot-2有10个手指和2个脚。 Wabot-2能够阅读一段音乐并陪伴一个人。
1986年,本田开始其人形研究和开发计划,以创建能够与人类成功互动的机器人。 麻省理工学院于1989年揭开了一个名为Genghis的六足机器人。由于施工方法的原因,成吉思汗以快速廉价的方式制造而闻名。 成吉思使用了4个微处理器,22个传感器和12个伺服电机。 Rodney Brooks和Anita M. Flynn发表了“快速,廉价和失控:机器人入侵太阳系”。 该论文主张制造更小更便宜的机器人,以增加生产时间并降低机器人进入太空的难度。
20世纪90年代
1994年,最成功的机器人辅助手术器具之一被FDA批准。 Cyberknife由John R. Adler发明,第一个系统于1991年在斯坦福大学安装。该放射外科系统将图像引导手术与机器人定位相结合。 Cyberknife现已用于治疗患有脑部或脊柱肿瘤的患者。 X射线摄像机跟踪位移并补偿由呼吸引起的运动。
仿生机器人RoboTuna由博士生David Barrett于1996年在麻省理工学院建造,研究鱼类如何在水中游泳。 RoboTuna旨在游泳并像蓝鳍金枪鱼[需要消除歧义]。
本田的P2人形机器人于1996年首次亮相。代表“原型2”,P2是本田人形开发项目中不可或缺的一部分。 身高超过6英尺(1.8米),P2比它的前辈小,并且在运动中看起来更像人。
预计只运行七天,Sojourner火星车在1997年运行83天后终于关闭。这个小型机器人(仅23磅或10.5公斤)在火星表面进行半自动操作,作为火星探路者任务的一部分; Sojourner配备了避障程序,能够规划和导航路线,研究地球表面。 Sojourner能够使用关于其环境和附近环境的小数据进行导航,使其能够对计划外事件和对象做出反应。
P3人形机器人于1998年被本田公开,作为该公司持续人形项目的一部分。 1999年,索尼推出了AIBO,一种能够与人类互动的机器狗; 日本发布的首批车型在20分钟内售罄。 本田公布了2000年人形项目最先进的结果,名为ASIMO。 ASIMO可以跑步,走路,与人交流,识别面孔,环境,声音和姿势,并与其环境互动。 索尼还透露了其索尼梦幻机器人,这是一款用于娱乐的小型人形机器人。 2000年10月,联合国估计世界上有742,500台工业机器人,其中一半以上在日本使用。
2001年至今
2001年4月,Canadarm2被发射到轨道并连接到国际空间站。 Canadarm2是航天飞机使用的更大,更强大的手臂版本,被誉为“更聪明”。 同样在4月,无人驾驶飞行器全球鹰从加利福尼亚的爱德华兹空军基地到太平洋的第一次自主直飞航班,飞往澳大利亚南部的爱尔兰皇家空军基地。 这次飞行是在22个小时内完成的。
流行的Roomba是一种机器人真空吸尘器,于2002年由iRobot公司首次发布。
2005年,康奈尔大学发现了一种能够自我复制的机器人; 一组能够连接和拆卸的立方体,第一个能够建立自身副本的机器人。 1月3日和24日,火星探测器Spirit and Opportunity于2003年发射,降落在火星表面。 这两个机器人的驾驶距离是原先预期的很多倍,而机遇号仍然在2018年中期运行,尽管由于一场大沙尘暴,通信随后丢失。
自动驾驶汽车在2005年左右出现了,但还有改进的余地。 参加DARPA大挑战赛(2004年)的15个设备中没有一个成功完成该课程; 事实上,没有一个机器人成功驾驶超过150英里(240公里)越野路线的5%,无法获得100万美元的奖金。 2005年,本田发布了新版ASIMO机器人,并更新了新的行为和功能。 2006年,康奈尔大学公布了其“海星”机器人,这是一种四足机器人,能够进行自我建模[需要澄清],并在受到损坏后学会走路。 2007年,TOMY推出了娱乐机器人i-sobot,这是一种人形双足机器人,可以像人类一样行走,在“特殊行动模式”下进行踢腿和拳击以及一些娱乐性的技巧和特殊行动。
Robonaut 2是最新一代的宇航员助手,于2011年在STS-133任务的发现号航天飞机上发射到太空站。它是太空中第一个类人机器人,虽然它目前的主要工作是教学工程师如何灵巧的机器人在太空中表现; 希望通过升级和改进,有朝一日可以在车站外冒险,帮助太空行走者修理或增加车站或进行科学工作。
2017年10月25日,在利雅得的未来投资峰会上,一个名为索菲亚的机器人被称为沙特阿拉伯公民身份,成为有史以来第一个拥有国籍的机器人。 这引起了争议,因为这是否意味着索菲亚可以投票或结婚,或者故意将系统关闭视为谋杀,这一点并不明显; 同样,考虑到沙特人类妇女的权利很少,这是有争议的。
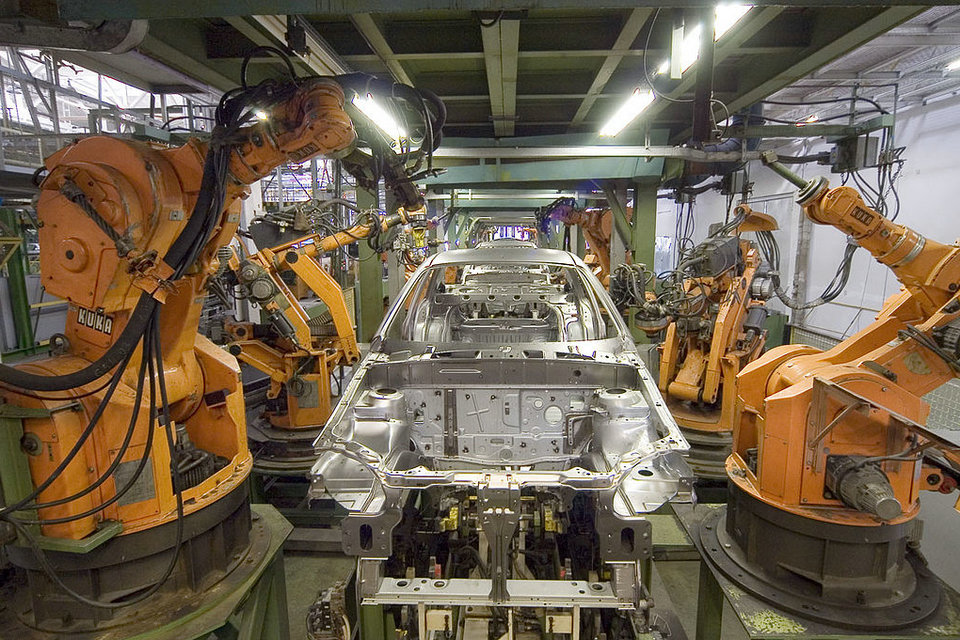
商业和工业机器人现在广泛使用,以比人类更便宜或更准确和可靠的方式执行工作。 它们还用于太脏,危险或无光泽以适合人类的任务。 机器人广泛用于制造,装配和包装,运输,地球和太空探索,外科手术,武器装备,实验室研究以及消费品和工业产品的大规模生产。
随着计算机硬件和数据管理软件的最新进展,人类的人工表示也变得普遍。 示例包括OpenMRS和EMRBots。