A história dos robôs tem suas origens no mundo antigo. O conceito moderno começou a ser desenvolvido com o início da Revolução Industrial, o que permitiu o uso de mecânicas complexas e a subsequente introdução de eletricidade. Isto tornou possível alimentar máquinas com pequenos motores compactos. No início do século 20, a noção de uma máquina humanóide foi desenvolvida. Hoje, pode-se imaginar robôs de tamanho humano com capacidade para pensamentos e movimentos quase humanos.
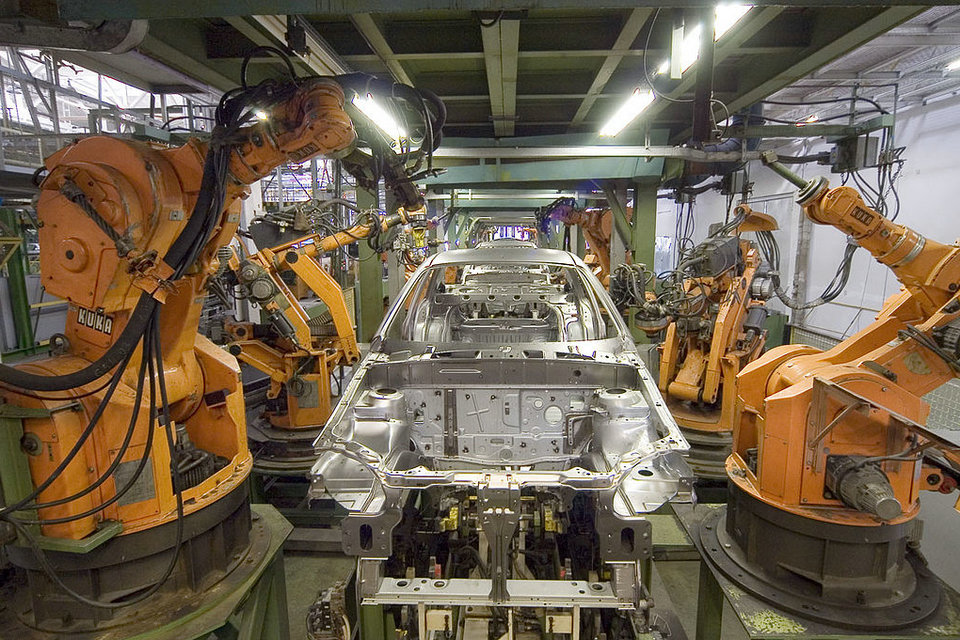
Os primeiros usos dos robôs modernos eram nas fábricas como robôs industriais – máquinas fixas simples, capazes de produzir tarefas que permitissem a produção com menor necessidade de assistência humana. Robôs industriais e robôs controlados digitalmente que utilizam inteligência artificial foram construídos desde a década de 2000.
Lendas Antigas
Os conceitos de servos e companheiros artificiais datam, pelo menos, das antigas lendas de Cadmo, que dizem ter semeado dentes de dragões que se transformaram em soldados e Pigmalião, cuja estátua de Galatea veio à vida. Muitas mitologias antigas incluíam pessoas artificiais, como as mecenas falantes construídas pelo deus grego Hefesto (Vulcano para os romanos) de ouro, os golems de argila da lenda judaica e os gigantes de argila da lenda nórdica.
Na mitologia grega, Hefesto criou tabelas utilitárias de três pernas que poderiam se mover sob seu próprio poder, e um homem de bronze, Talos, que defendia Creta. Talos acabou por ser destruído por Medea que lançou um raio em sua única veia de chumbo. Para pegar o velocino de ouro, Jason também era obrigado a domar dois touros de fogo com cascos de bronze; e como Cadmus, ele semeou os dentes de um dragão em soldados.
O índio Lokapannatti (séculos XI / XII) conta a história do rei Ajatashatru de Magadha, que reuniu as relíquias do Buda e as escondeu em uma stupa subterrânea. As relíquias eram protegidas por robôs mecânicos (bhuta vahana yanta), do reino de Roma visaya, até serem desarmados pelo rei Ashoka. Na lenda egípcia de Rocail, o irmão mais novo de Seth criou um palácio e um sepulcro contendo estátuas autônomas que viviam tão realisticamente as vidas dos homens que eram confundidos com almas.
Inspirado pela lenda cristã européia, os europeus medievais criaram cabeças descaradas que poderiam responder a perguntas feitas a eles. Albertus Magnus supostamente construiu um andróide inteiro que poderia realizar algumas tarefas domésticas, mas foi destruído pelo estudante de Albert, Tomás de Aquino, por perturbar seu pensamento. A lenda mais famosa dizia respeito a uma cabeça de bronze inventada por Roger Bacon, que foi destruída ou desfeita depois que ele perdeu seu momento de operação. Autômatos semelhantes a humanos ou animais eram populares nos mundos imaginários da literatura medieval.
Autômatos
Autómatos mecânicos foram construídos no século 10 aC na dinastia Zhou Ocidental. O artesão Yan Shi fez autômatos humanóides que podiam cantar e dançar. Dizem que a máquina possuía órgãos semelhantes à vida, como ossos, músculos e articulações. O Cosmic Engine, uma torre de relógio de 10 metros construída por Su Song em Kaifeng, China, em 1088, apresentava manequins mecânicos que tocavam as horas, tocavam campainhas ou sinos entre outros dispositivos. Festas de automação continuaram na dinastia Tang. Daifeng Ma construiu um criado automático para a rainha. Ying Wenliang construiu um homem de autômatos que propunha brindes em banquetes e uma autômata de madeira que tocava o sheng. Entre os melhores autômatos documentados da China antiga estão Han Zhile, um japonês que se mudou para a China no início do século IX aC.
No século 4 aC, o matemático Archytas de Tarentum postulou um pássaro mecânico que ele chamou de “O Pombo”, que era movido a vapor. Outro autômato inicial era a clepsidra, feita em 250 aC por Ctesibius de Alexandria, um físico e inventor do Egito ptolomaico. Herói de Alexandria (10-70 dC) fez inúmeras inovações no campo de autômatos, incluindo um que supostamente poderia falar. Tomando a referência anterior na Ilíada de Homero, Aristóteles especulou em sua Política (ca. 322 aC, livro 1, parte 4) que os autômatos poderiam, algum dia, promover a igualdade humana, tornando possível a abolição da escravidão:
Há apenas uma condição na qual podemos imaginar gerentes que não precisam de subordinados e mestres que não precisam de escravos. Essa condição seria que cada instrumento pudesse fazer seu próprio trabalho, na palavra de comando ou por antecipação inteligente, como as estátuas de Dédalo ou os tripés feitos por Hefesto, dos quais Homero relata que “Por sua própria iniciativa, eles entraram no conclave de Deuses no Olimpo “, como se um vaivém tivesse de tecer por si mesmo, e um plectro tocasse sua própria harpa.
Al-Jazari (1136–1206), um inventor muçulmano durante a dinastia Artuqid, projetou e construiu várias máquinas automáticas, incluindo aparelhos de cozinha e autômatos musicais movidos a água. Um autômato particularmente complexo incluía quatro músicos automáticos que flutuavam em um lago.
As obras de Herói em autômatos foram traduzidas para o latim em meio ao Renascimento do século XII. O engenheiro-artista do início do século XIII, Villard de Honnecourt, esboçou planos para vários autômatos. No final do século XIII, Robert II, Conde de Artois, construiu um jardim de prazer em seu castelo em Hesdin que incorporou vários robôs, humanóides e animais.
Entre as primeiras verificações de automação está um humanóide desenhado por Leonardo da Vinci (1452–1519) por volta de 1495. Os cadernos de Leonardo, redescobertos nos anos 50, contêm desenhos detalhados de um cavaleiro mecânico de armadura capaz de se sentar, agitar seus braços e Mova a cabeça e a mandíbula. Em 1533, Johannes Müller von Königsberg criou uma águia autómata e uma mosca feita de ferro; ambos podiam voar. John Dee também é conhecido por criar um besouro de madeira, capaz de voar.
O pensador do século 17 René Descartes acreditava que animais e seres humanos eram máquinas biológicas. Em sua última viagem à Noruega, ele levou consigo uma boneca mecânica que parecia a filha morta Francine. No século 18, o mestre fabricante de brinquedos Jaques de Vaucanson construiu para Louis XV um pato automatizado com centenas de peças móveis, que podiam comer e beber. Posteriormente, Vaucanson construiu autômatos humanóides, um baterista e um tocador de pífano, conhecidos por sua semelhança anatômica com seres humanos reais. A criação de Vaucanson inspirou os relojoeiros europeus a fabricar autômatos mecânicos e tornou-se moda entre a aristocracia européia coletar dispositivos mecânicos sofisticados para entretenimento. Na década de 1770, o suíço Pierre Jaquet-Droz criou autômatos móveis que pareciam crianças, o que encantou Mary Shelly, que passou a escrever Frankenstein: The Modern Prometheus. A última tentativa de automação foi The Turk, de Wolfgang von Kempelen, uma máquina sofisticada que poderia jogar xadrez contra um oponente humano e fazer um tour pela Europa. Quando a máquina foi trazida para o novo mundo, levou Edgar Allan Poe a escrever um ensaio, no qual ele concluiu que era impossível para os dispositivos mecânicos raciocinar ou pensar.
O artesão japonês Hisashige Tanaka, conhecido como “Japan’s Edison”, criou uma série de brinquedos mecânicos extremamente complexos, alguns dos quais podiam servir chá, flechas de fogo tiradas de um tremor, ou até mesmo pintar um kanji japonês. O texto marco Karakuri Zui (Máquinas Ilustradas) foi publicado em 1796.
História moderna
1900s
No livro “O Maravilhoso Mágico de Oz”, os robôs eram chamados de “homens mecânicos”. Um personagem notável era o Homem de Lata, um homem feito de lata que cortava árvores nas florestas de Oz.
1910s
O primeiro robô humanóide foi um soldado com trombeta, feito em 1910 por Friedrich Kaufmann em Dresden, na Alemanha. Na Primeira Guerra Mundial foram utilizadas armas de controle remoto, baseadas no trabalho de Nikola Tesla, que construiu um barco elétrico que poderia ser controlado remotamente pelo rádio.
Década de 1920
O termo “robô” foi usado pela primeira vez em uma peça publicada pelo checo Karel Čapek em 1920. RUR (Robôs Universais de Rossum) era uma sátira, robôs eram fabricados seres biológicos que realizavam todo o trabalho manual desagradável. De acordo com Čapek, a palavra foi criada por seu irmão Josef da robótica tcheca, significando servidão. O jogo RUR, substituiu o uso popular da palavra “autômato”. No entanto, até o “robô” dos anos 1950 foi pronunciado “robit” em filmes, programas de rádio e televisão: exemplos são “The Lonely” episódio da série de TV “The Twilight Zone”, exibido pela primeira vez em 15 de novembro de 1959, e o programa de rádio de ficção científica “X Minus One”.
A Westinghouse Electric Corporation construiu o Televox em 1926; era um recorte de papelão conectado a vários dispositivos que os usuários podiam ligar e desligar. Em 1927, Metropolis de Fritz Lang foi lançado; o Maschinenmensch (“máquina humana”), um robô humanoide ginóide, também chamado de “Paródia”, “Futura”, “Robotrix”, ou o “Maria imitador” (interpretado pela atriz alemã Brigitte Helm), foi o primeiro robô a ser retratado no filme.
Os mais famosos autômatos robóticos japoneses foram apresentados ao público em 1927. O Gakutensoku deveria ter um papel diplomático. Atuada por ar comprimido, ela pode escrever de forma fluida e erguer as pálpebras. Muitos robôs foram construídos antes do surgimento de servomecanismos controlados por computador, para fins de relações públicas de grandes empresas. Estas eram essencialmente máquinas que poderiam realizar algumas acrobacias, como os autômatos do século XVIII. Em 1928, um dos primeiros robôs humanóides foi exibido na exposição anual da Model Engineers Society em Londres. Inventado por WH Richards, o robô – chamado Eric – consistia em uma armadura de alumínio com onze eletroímãs e um motor alimentado por uma fonte de energia de 12 volts. O robô podia mover suas mãos e cabeça e podia ser controlado por controle remoto ou controle de voz.
Década de 1930
Em 1939, o robô humanóide conhecido como Elektro apareceu na Feira Mundial. Com 2,1 m de altura e pesando 120 kg, ele podia andar por comando de voz, falar cerca de 700 palavras (usar um toca-discos de 78 rpm), fumar cigarros, explodir balões e movimentar a cabeça e os braços. . O corpo consistia de uma came de engrenagem de aço e um esqueleto de motor coberto por uma pele de alumínio.
Em 1939, Konrad Zuse construiu o primeiro computador eletromecânico programável, lançando as bases para a construção de uma máquina humanóide que agora é considerada um robô.
Década de 1940
Em 1941 e 1942, Isaac Asimov formulou as Três Leis da Robótica, e no processo cunhou a palavra “robótica”. Em 1945, Vannevar Bush publicou As We May Think, um ensaio que investigou o potencial do processamento eletrônico de dados. Ele previu o surgimento de computadores, processadores digitais de texto, reconhecimento de voz e tradução automática. Mais tarde, ele foi creditado por Ted Nelson, o inventor do hipertexto. Em 1948, Norbert Wiener formulou os princípios da cibernética, a base da robótica prática.
Os primeiros robôs autônomos eletrônicos com comportamento complexo foram criados por William Gray Walter, do Burden Neurological Institute, em Bristol, Inglaterra, em 1948 e 1949. Ele queria provar que as conexões ricas entre um pequeno número de células cerebrais poderiam dar origem a comportamentos muito complexos. essencialmente, que o segredo de como o cérebro funcionava estava em como ele estava ligado. Seus primeiros robôs, chamados Elmer e Elsie, foram construídos entre 1948 e 1949 e eram frequentemente descritos como “tartarugas” devido à sua forma e baixa velocidade de movimento. Os robôs de tartaruga de três rodas eram capazes de fototaxia, através dos quais eles poderiam encontrar o caminho para uma estação de recarga quando eles estavam com pouca bateria.
Walter ressaltou a importância de usar a eletrônica puramente analógica para simular processos cerebrais, numa época em que seus contemporâneos, como Alan Turing e John von Neumann, estavam se voltando para uma visão dos processos mentais em termos de computação digital. O trabalho de Walter inspirou gerações subseqüentes de pesquisadores de robótica, como Rodney Brooks, Hans Moravec e Mark Tilden. Encarnações modernas das “tartarugas” de Walter podem ser encontradas na forma de robótica BEAM.
Anos 50
Em 1951, Walter publicou o artigo A Machine, que aprende, documentando como seus robôs mecânicos mais avançados agiram como agentes inteligentes, demonstrando a aprendizagem reflexa condicionada. O primeiro robô digitalmente operado e programável foi inventado por George Devol em 1954 e foi chamado de Unimate. Isso mais tarde estabeleceu as bases da indústria moderna de robótica.
No Japão, os robôs tornaram-se personagens populares dos quadrinhos. Os robôs se tornaram ícones culturais e o governo japonês foi estimulado a financiar pesquisas em robótica. Entre os personagens mais emblemáticos estava o Astro Boy, que é ensinado sentimentos humanos como amor, coragem e insegurança. Culturalmente, robôs no Japão tornaram-se ajudantes de suas contrapartes humanas.
Anos 1960
Devol vendeu o primeiro Unimate para a General Motors em 1960, e foi instalado em 1961 em uma fábrica em Ewing Township, Nova Jersey, para levantar peças quentes de metal de uma máquina de fundição sob pressão e colocá-las em líquido refrigerante. “Sem qualquer fanfarra, o primeiro robô de trabalho do mundo juntou-se à linha de montagem na fábrica da General Motors em Ewing Township na primavera de 1961 … Era um molde de fundição automatizado que soltava maçanetas em brasa e outros carros semelhantes. partes em poços de líquido de resfriamento em uma linha que os movia junto aos trabalhadores para aparar e polir “. A patente da Devol para o primeiro braço robótico programável operado digitalmente representa a base da moderna indústria de robótica.
O Rancho Arm foi desenvolvido como um braço robótico para ajudar pacientes com deficiências no Hospital Rancho Los Amigos, em Downey, Califórnia; esse braço controlado por computador foi comprado pela Universidade de Stanford em 1963. Em 1967, o primeiro robô industrial foi colocado em uso produtivo no Japão. O robô Versatran foi desenvolvido pela American Machine and Foundry. Um ano depois, um projeto de robô hidráulico da Unimation foi colocado em produção pela Kawasaki Heavy Industries. Marvin Minsky criou o Tentacle Arm em 1968; o braço era controlado por computador e suas 12 articulações eram movidas por sistema hidráulico. Em 1969, Victor Scheinman, estudante de engenharia mecânica, criou o Stanford Arm, reconhecido como o primeiro braço robótico controlado por computador eletrônico (as instruções do Unimate eram armazenadas em um tambor magnético).
No final da década de 1960, a Guerra do Vietnã tornou-se o campo de testes para tecnologia automatizada de comando e redes de sensores. Em 1966, a Linha McNamara foi proposta com o objetivo de praticamente não exigir forças terrestres. Esta rede de sensores de sensores sísmicos e acústicos, fotoreconhecimento e minas terrestres acionadas por sensores foi implementada apenas parcialmente devido ao alto custo. O primeiro robô móvel capaz de raciocinar sobre seu entorno, o Shakey, foi construído em 1970 pelo Stanford Research Institute (agora SRI International). Shakey combinou várias entradas de sensores, incluindo câmeras de TV, telêmetros a laser e “sensores de impacto” para navegação.
Anos 70
No início dos anos 70, foram desenvolvidas munições de precisão e armas inteligentes. Armas tornaram-se robóticas implementando orientação terminal. No final da Guerra do Vietnã, as primeiras bombas guiadas por laser foram implantadas, que poderiam encontrar seu alvo seguindo um feixe de laser apontado para o alvo. Durante a Operação de 1972, as bombas guiadas a laser Linebacker foram eficazes, mas ainda dependiam muito dos operadores humanos. As armas de fogo e esquecimento também foram desdobradas pela primeira vez na Guerra do Vietnã, quando não foram lançadas mais nenhuma atenção ou ação do operador.
O desenvolvimento de robôs humanóides foi avançado consideravelmente pelos cientistas japoneses da robótica nos anos 70. A Universidade de Waseda iniciou o projeto WABOT em 1967 e, em 1972, concluiu o WABOT-1, o primeiro robô inteligente humanóide em escala real do mundo. Seu sistema de controle de membros permitia andar com os membros inferiores e segurar e transportar objetos com as mãos, usando sensores táteis. Seu sistema de visão permitiu medir distâncias e direções para objetos usando receptores externos, olhos e ouvidos artificiais. E seu sistema de conversação permitia que ele se comunicasse com uma pessoa em japonês, com uma boca artificial. Isso fez dele o primeiro andróide.
Freddy e Freddy II foram robôs construídos na Escola de Informática da Universidade de Edimburgo por Pat Ambler, Robin Popplestone, Austin Tate e Donald Mitchie, e foram capazes de montar blocos de madeira em um período de várias horas. A empresa alemã KUKA construiu o primeiro robô industrial do mundo com seis eixos acionados eletromecanicamente, conhecido como FAMULUS.
Em 1974, David Silver projetou o braço de prata, que era capaz de movimentos finos replicando mãos humanas. O feedback foi fornecido por sensores de toque e pressão e analisados por um computador. O SCARA, Conjunto de Conformidade Seletiva Robot Arm, foi criado em 1978 como um eficiente braço robótico de 4 eixos. Melhor usado para pegar as peças e colocá-las em outro local, o SCARA foi introduzido nas linhas de montagem em 1981.
O carro de Stanford atravessou com sucesso uma sala cheia de cadeiras em 1979. Baseava-se principalmente na visão estéreo para navegar e determinar as distâncias. O Instituto de Robótica da Carnegie Mellon University foi fundado em 1979 por Raj Reddy.
Anos 80
Takeo Kanade criou o primeiro “braço de acionamento direto” em 1981. O primeiro de seu tipo, os motores do braço estavam contidos dentro do próprio robô, eliminando longas transmissões.
Em 1984, Wabot-2 foi revelado; capaz de tocar o órgão, Wabot-2 tinha 10 dedos e dois pés. Wabot-2 foi capaz de ler uma partitura de música e acompanhar uma pessoa.
Em 1986, a Honda iniciou seu programa de pesquisa e desenvolvimento humanóide para criar robôs capazes de interagir com sucesso com seres humanos. Um robô hexapodal chamado Gêngis foi revelado pelo MIT em 1989. Gêngis era famoso por ser feito de forma rápida e barata devido aos métodos de construção; Gêngis usou 4 microprocessadores, 22 sensores e 12 servomotores. Rodney Brooks e Anita M. Flynn publicaram “Rápido, Barato e Fora de Controle: Uma Invasão Robótica do Sistema Solar”. O jornal defendeu a criação de robôs menores e mais baratos em maior número para aumentar o tempo de produção e diminuir a dificuldade de lançar robôs no espaço.
Anos 90
Em 1994, um dos aparelhos de cirurgia assistida por robô de maior sucesso foi autorizado pela FDA. O Cyberknife foi inventado por John R. Adler e o primeiro sistema foi instalado na Universidade de Stanford em 1991. Este sistema de radiocirurgia integrou a cirurgia guiada por imagem com posicionamento robótico. O Cyberknife está agora implantado para tratar pacientes com tumores no cérebro ou na coluna. Uma câmera de raios X rastreia o deslocamento e compensa o movimento causado pela respiração.
O robô biomimético RoboTuna foi construído pelo estudante de doutorado David Barrett no Massachusetts Institute of Technology em 1996 para estudar como os peixes nadam na água. RoboTuna é projetado para nadar e se assemelhar a um atum rabilho [desambiguação necessária].
O robô humanóide P2 da Honda foi mostrado pela primeira vez em 1996. Representando o “Modelo Protótipo 2”, o P2 era parte integrante do projeto de desenvolvimento humanóide da Honda; com mais de 1,8 metro de altura, o P2 era menor que seus antecessores e parecia ser mais humano em seus movimentos.
Esperado para operar por apenas sete dias, o rover Sojourner finalmente desliga após 83 dias de operação em 1997. Este pequeno robô (apenas 23 libras ou 10,5 kg) realizou operações semi-autônomas na superfície de Marte como parte da missão Mars Pathfinder. ; equipado com um programa de prevenção de obstáculos, Sojourner foi capaz de planejar e navegar por rotas para estudar a superfície do planeta. A habilidade de Sojourner de navegar com poucos dados sobre seu ambiente e arredores próximos permitiu reagir a eventos e objetos não planejados.
O robô humanóide P3 foi revelado pela Honda em 1998 como parte do projeto humanóide contínuo da empresa. Em 1999, a Sony introduziu o AIBO, um cão robótico capaz de interagir com humanos; os primeiros modelos lançados no Japão esgotaram em 20 minutos. A Honda revelou o resultado mais avançado de seu projeto humanóide em 2000, chamado ASIMO. O ASIMO pode correr, andar, comunicar-se com humanos, reconhecer rostos, ambientes, vozes e postura, e interagir com o ambiente. A Sony também revelou seu Sony Dream Robots, pequenos robôs humanóides em desenvolvimento para entretenimento. Em outubro de 2000, as Nações Unidas estimaram que havia 742.500 robôs industriais no mundo, com mais da metade deles sendo usados no Japão.
2001-presente
Em abril de 2001, o Canadarm2 foi lançado em órbita e anexado à Estação Espacial Internacional. O Canadarm2 é uma versão maior e mais capaz do braço usado pelo Ônibus Espacial e é saudado como “mais inteligente”. Também em abril, o Global Hawk, veículo aéreo não-tripulado, realizou o primeiro voo autônomo sem escala sobre o Oceano Pacífico, partindo da Base Edwards da Força Aérea, na Califórnia, até RAAF Base Edinburgh, no sul da Austrália. O vôo foi feito em 22 horas.
O popular Roomba, um aspirador robótico, foi lançado pela primeira vez em 2002 pela empresa iRobot.
Em 2005, a Universidade Cornell revelou um robô capaz de auto-replicação; um conjunto de cubos capazes de prender e separar, o primeiro robô capaz de construir cópias de si mesmo. Lançado em 2003, nos dias 3 e 24 de janeiro, os rovers da Mars Spirit e Opportunity aterrissaram na superfície de Marte. Ambos os robôs conduziram muitas vezes a distância inicialmente esperada, e o Opportunity ainda estava operando a partir de meados de 2018, embora as comunicações tenham sido subsequentemente perdidas devido a uma grande tempestade de poeira.
Os carros autônomos haviam aparecido por volta de 2005, mas havia espaço para melhorias. Nenhum dos 15 dispositivos competindo no DARPA Grand Challenge (2004) completou com sucesso o curso; na verdade, nenhum robô conseguiu navegar com sucesso em mais de 5% do percurso off-road de 240 quilômetros, deixando o prêmio de US $ 1 milhão não reclamado. Em 2005, a Honda revelou uma nova versão do seu robô ASIMO, atualizada com novos comportamentos e capacidades. Em 2006, a Universidade de Cornell revelou seu robô “Starfish”, um robô de quatro patas capaz de auto modelagem [esclarecimento necessário] e aprendendo a andar depois de ter sido danificado. Em 2007, TOMY lançou o robô de entretenimento, i-sobot, um robô humanóide bípede que pode andar como um humano e executa chutes e socos e também alguns truques divertidos e ações especiais no “Modo de Ação Especial”.
Robonaut 2, a última geração de ajudantes de astronautas, foi lançada na estação espacial a bordo do Space Shuttle Discovery na missão STS-133 em 2011. É o primeiro robô humanóide no espaço, e embora seu trabalho principal por enquanto seja ensinar os engenheiros como robôs dextrous se comportam no espaço; a esperança é que através de atualizações e avanços, um dia ele possa se aventurar fora da estação para ajudar os astronautas a fazer consertos ou acréscimos à estação ou realizar trabalhos científicos.
Em 25 de outubro de 2017, na Future Investment Summit, em Riyadh, um robô chamado Sophia e referido com pronomes femininos recebeu a cidadania da Arábia Saudita, tornando-se o primeiro robô a ter uma nacionalidade. Isso tem atraído controvérsia, pois não é óbvio se isso implica que Sophia pode votar ou se casar, ou se um desligamento deliberado do sistema pode ser considerado um assassinato; também, é controverso considerar como poucos direitos são dados às mulheres humanas sauditas.
Robôs comerciais e industriais estão agora em uso generalizado, realizando trabalhos mais baratos ou com maior precisão e confiabilidade do que os humanos. Eles também são empregados para tarefas que são muito sujas, perigosas ou sem graça para serem adequadas para humanos. Os robôs são amplamente utilizados na fabricação, montagem e embalagem, transporte, exploração da Terra e do espaço, cirurgia, armamento, pesquisa de laboratório e produção em massa de bens de consumo e industriais.
Com os recentes avanços em hardware de computador e software de gerenciamento de dados, representações artificiais de seres humanos também estão se tornando difundidas. Exemplos incluem OpenMRS e EMRBots.