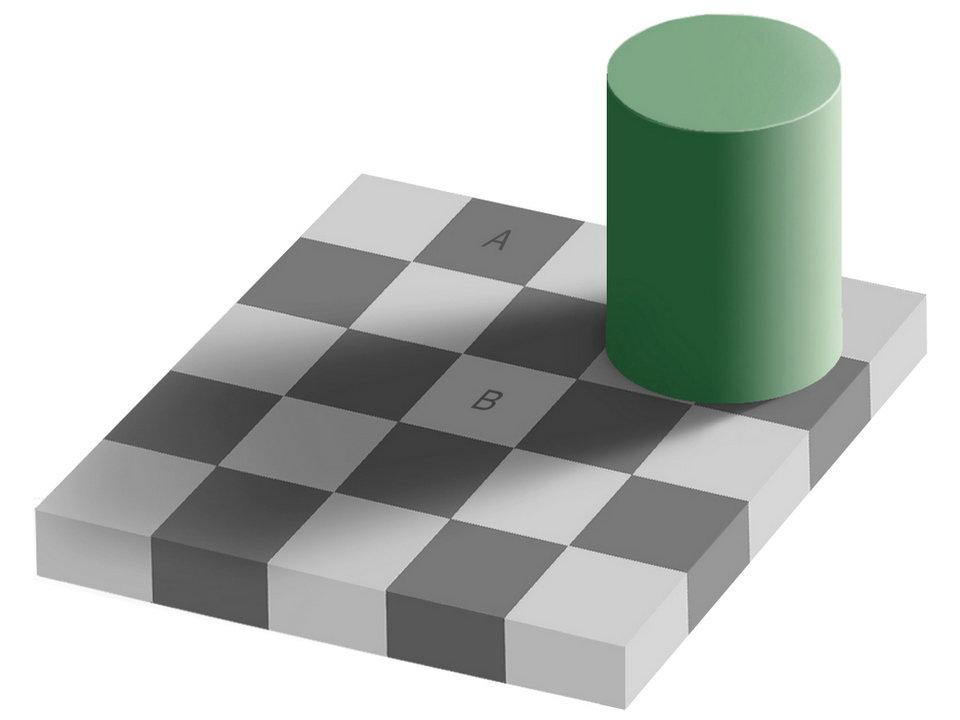
颜色恒常性(Color constancy)是主观恒定性的一个例子,也是人类色彩感知系统的一个特征,它确保在变化的照明条件下物体的感知颜色保持相对恒定。 例如,当主要照明为白色阳光时,以及在日落时主要照明为红色时,例如一个青苹果在中午看起来为绿色。 这有助于我们识别物体。
色彩视觉
色觉是一种过程,通过该过程,生物体和机器能够根据物体反射,透射或发射的不同波长的光来区分物体。 在人类中,眼睛使用两种类型的感光器,视锥细胞和视棒检测光线,将信号发送到视觉皮层,然后将这些感觉转化为主观感知的颜色。 颜色恒常性是一个过程,它允许大脑将一个熟悉的物体识别为一致的颜色,而不管从给定时刻反射的光量或波长如何。
物体照度
当照明源不是直接知道时,会发生颜色恒常现象。 正是出于这个原因,颜色恒常性对太阳和晴空的日子影响较大,而不是阴天。 即使太阳可见,颜色恒常性也可能影响颜色感知。 这是由于对所有可能的照明来源的无知。 虽然一个物体可能会将多种光源反射到眼睛中,但颜色恒常性会导致客观身份保持不变。
DH Foster博士(2011年)指出,“在自然环境中,光源本身可能没有很好的定义,因为场景中某个特定点的照明通常是直接和间接光源的复杂混合,的入射角度,然后通过局部遮挡和相互反射进行修改,所有这些都会随着时间和位置而变化。“自然环境中广泛的可能照度以及人眼感知颜色的能力有限意味着颜色恒常性在日常感知中起作用。 颜色恒常性允许人类以一致或真实的方式与世界进行交互,并允许人们更有效地对一天中的时间做出判断。
生理基础
颜色恒常性的生理学基础被认为涉及在主要视觉皮层中的专用神经元,其计算锥体活动的局部比率,这与Land的Retinex算法用于实现颜色恒常性的计算相同。 这些专门化的细胞被称为双重对手细胞,因为它们计算颜色对数和空间对立。 Nigel Daw在金鱼视网膜中首次描述了双对手细胞。 关于灵长类动物视觉系统中这些细胞的存在引起了相当多的争论, 它们的存在最终通过使用反向相关感受野测绘和一次选择性激活单个锥体类别的特殊刺激来证明,即所谓的“锥体分离”刺激。
仅当入射光包含一定范围的波长时,颜色恒定性才起作用。 眼睛的不同锥形单元记录场景中每个物体反射的光线的不同但重叠的波长范围。 从这些信息中,视觉系统试图确定照明光的大致组成。 然后打折这种照明以获得物体的“真实色彩”或反射:物体反射的光的波长。 这个反射率在很大程度上决定了感知的颜色。
神经机制
颜色恒常性有两种可能的机制。 第一种机制是无意识推理。 第二种观点认为这种现象是由感官适应造成的。 研究表明颜色恒常性与视网膜细胞以及与视觉相关的皮层区域的相关变化有关。 这种现象最有可能归因于视觉系统各个层次的变化。
锥适应
锥体,视网膜内的特殊细胞将相对于局部环境内的光照水平进行调整。 这发生在各个神经元的水平。 但是,这种适应并不完整。 色彩适应也受大脑内的过程调节。 猴子的研究表明,色度敏感度的变化与细胞外侧膝状体神经元的活动相关。 颜色恒常性可能归因于单个视网膜细胞的局部变化或脑内更高水平的神经过程。
同色异谱
同色异谱,在两个独立场景中感知颜色,可以帮助通知有关颜色恒常性的研究。 研究表明,当呈现竞争色彩刺激时,空间比较必须在视觉系统的早期完成。 例如,当受试者以分色方式呈现刺激时,呈现颜色和空白颜色(例如灰色)的阵列,并且被告知专注于阵列的特定颜色时,空白颜色看起来不同于在双目中感知的空白颜色时尚。 这意味着颜色判断,因为它们与空间比较有关,必须在V1单眼神经元之前或之前完成。 如果空间比较稍后在视觉系统中发生,例如在皮层区域V4中,则大脑将能够感知颜色和空白的颜色,如同它们以双眼方式看到的一样。
Retinex理论
1971年,Edwin H. Land描述了这种效应,他提出了“retinex理论”来解释它。 “retinex”这个词是由“视网膜”和“皮质”组成的一个portmanteau,这表明眼睛和大脑都参与了加工过程。
效果可以通过以下实验演示。 向一个人展示一幅名为“蒙德里安”(在皮特蒙德里安之后,其绘画相似),由许多彩色斑块组成的展览。 显示屏由三个白光照亮,一个通过红色滤光片投影,一个通过绿色滤光片投射,另一个通过蓝色滤光片投射。 要求该人员调整灯光强度,以使显示器中的特定补丁显示为白色。 然后实验者测量从这个出现白色斑块反射的红色,绿色和蓝色光的强度。 然后实验者要求该人员识别相邻贴片的颜色,例如,该贴片显示为绿色。 然后实验者调整光线,使得从绿色斑点反射的红色,蓝色和绿色光的强度与最初从白色斑点测量的相同。 该人显示颜色恒常性,因为绿色补丁继续呈现绿色,白色补丁继续呈现白色,剩下的所有补丁继续保持其原始颜色。
颜色恒常性是计算机视觉的一个理想特征,许多算法都是为此目的而开发的。 这些包括几个Retinex算法。 这些算法接收图像中每个像素的红色/绿色/蓝色值作为输入,并尝试估计每个点的反射率。 一种这样的算法操作如下:确定所有像素的最大红色值rmax,并确定最大绿色值gmax和最大蓝色值bmax。 假设场景包含反射所有红光的物体和反射所有绿光的(其他)物体,以及反射所有蓝光的其他物体,则可以推断照明光源由(rmax,gmax,bmax)描述, 。 对于具有值(r,g,b)的每个像素,其反射率估计为(r / rmax,g / gmax,b / bmax)。 Land和McCann提出的原始Retinex算法使用了这个原理的一个局部版本。
虽然retinex模型仍然广泛用于计算机视觉,但实际的人类色彩感知已被证明是更复杂的。