Электродвигатель представляет собой электрическую машину, которая преобразует электрическую энергию в механическую. Большинство электродвигателей работают через взаимодействие между магнитным полем двигателя и токами обмотки для генерации силы в виде вращения. Электродвигатели могут питаться от источников постоянного тока (постоянного тока), таких как батареи, автомобили или выпрямители, или источники переменного тока (переменного тока), например, электросети, инверторы или электрические генераторы. Электрический генератор механически идентичен электродвигателю, но работает в обратном направлении, принимая механическую энергию (например, от проточной воды) и превращая эту механическую энергию в электрическую.
Электродвигатели могут быть классифицированы по таким соображениям, как тип источника питания, внутренняя конструкция, применение и тип выхода движения. В дополнение к типам переменного тока и постоянного тока двигатели могут быть шлифовальными или бесщеточными, могут иметь разную фазу (см. Однофазную, двухфазную или трехфазную) и могут быть либо воздушно-охлаждаемыми, либо жидкостно-охлажденными. Двигатели общего назначения со стандартными размерами и характеристиками обеспечивают удобную механическую мощность для промышленного использования. Крупнейшие электродвигатели используются для судовых двигателей, сжатий трубопроводов и насосно-компрессорных систем с рейтингами, достигающими 100 мегаватт. Электродвигатели находятся в промышленных вентиляторах, воздуходувках и насосах, станках, бытовой технике, электроинструментах и дисках. Малые двигатели можно найти в электрических часах.
В некоторых применениях, таких как рекуперативное торможение с тяговыми двигателями, электродвигатели могут использоваться в обратном порядке в качестве генераторов для восстановления энергии, которая в противном случае могла бы быть потеряна как тепло и трение.
Электродвигатели производят линейную или вращательную силу (крутящий момент) и могут отличаться от таких устройств, как магнитные соленоиды и громкоговорители, которые преобразуют электроэнергию в движение, но не генерируют полезную механическую силу, которые соответственно называются приводами и преобразователями.
Компоненты
ротор
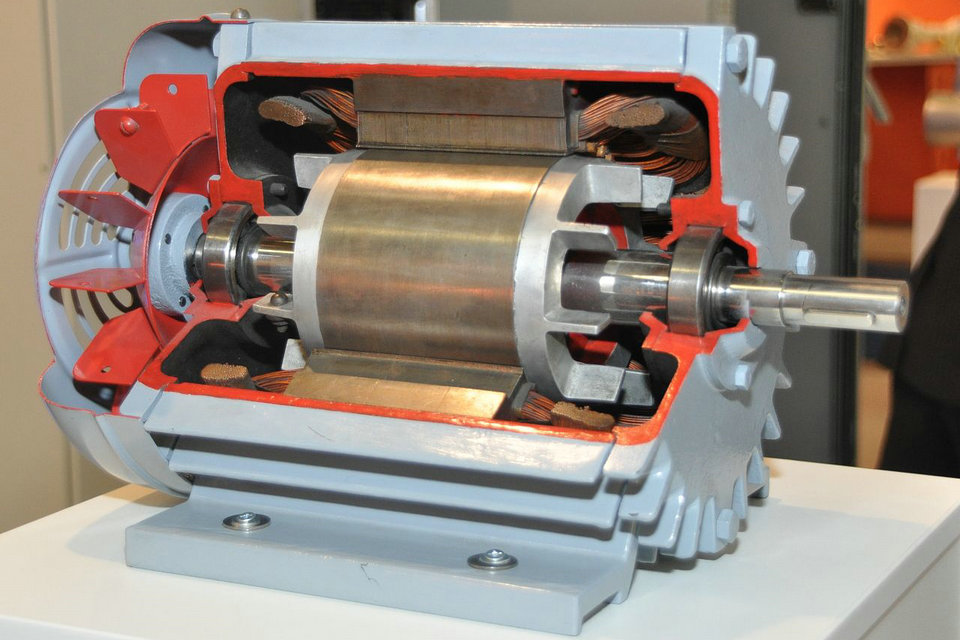
В электродвигателе движущаяся часть представляет собой ротор, который превращает вал в механическую мощность. Ротор обычно содержит в себе проводники, которые переносят токи, которые взаимодействуют с магнитным полем статора, чтобы генерировать силы, которые поворачивают вал. В качестве альтернативы, некоторые роторы имеют постоянные магниты, а статор удерживает проводники.
Подшипники
Ротор поддерживается подшипниками, которые позволяют ротору поворачивать свою ось. Подшипники, в свою очередь, поддерживаются корпусом двигателя. Вал двигателя проходит через подшипники к внешней стороне двигателя, где применяется нагрузка. Поскольку силы нагрузки выходят за самый внешний подшипник, нагрузка, как говорят, нависает.
статор
Статор является неподвижной частью электромагнитного контура двигателя и обычно состоит из обмоток или постоянных магнитов. Ядро статора составлено из множества тонких металлических листов, называемых ламинациями. Ламинирование используется для уменьшения потерь энергии, которые могут возникнуть при использовании твердого сердечника.
Воздушный зазор
Расстояние между ротором и статором называется воздушным зазором. Воздушный зазор имеет важные последствия и, как правило, как можно меньше, поскольку большой разрыв оказывает сильное отрицательное влияние на производительность. Это основной источник низкого коэффициента мощности при работе двигателей. Ток намагничивания увеличивается с воздушным зазором. По этой причине воздушный зазор должен быть минимальным. Очень небольшие промежутки могут создавать механические проблемы в дополнение к шуму и потерям.
Обмотки
Обмотки — это провода, которые укладываются в катушки, обычно обернутые вокруг ламинированного магнита с мягким железом, чтобы образовывать магнитные полюса при подаче тока с напряжением.
Электрические машины поставляются в двух основных конфигурациях полюсных магнитных полюсов: конфигурации с несимметричным и неосновным полюсом. Магнитное поле полюса в механизме с шестью полюсами создается намоткой вокруг полюса под поверхностью полюса. В нейтральном полюсе, или в распределенном поле, или в кольцевом роторе, обмотка распределяется в гнездах полюсных граней. Двигатель с заштрихованным полюсом имеет обмотку вокруг части полюса, которая задерживает фазу магнитного поля для этого полюса.
Некоторые двигатели имеют проводники, состоящие из более толстого металла, такого как стержни или металлические листы, обычно медь, альтернативно алюминий. Обычно они питаются от электромагнитной индукции.
коммутатор
Коммутатор — это механизм, используемый для переключения входа большинства машин постоянного тока и некоторых машин переменного тока. Он состоит из сегментов скольжения, изолированных друг от друга и от вала. Ток якоря двигателя подается через стационарные щетки, находящиеся в контакте с вращающимся коммутатором, что вызывает необходимость изменения тока, и подает питание на машину оптимальным образом, так как ротор вращается от полюса к полюсу. В отсутствие такого поворота тока двигатель остановился бы. В свете усовершенствованных технологий в электронном контроллере, бессенсорном управлении, асинхронном двигателе и полях с постоянным магнитом, двигатели с индуктивным и постоянным магнитом с внешним переключением вытесняют электромеханически коммутируемые двигатели.
Электроснабжение и контроль
Электродвигатели
Электродвигатель постоянного тока обычно подается через коммутатор кольцевого уплотнения, как описано выше. Электродвигатели переменного тока могут быть либо коммутирующими кольцами, либо коммутируемыми по внешнему виду, могут быть типами с фиксированной скоростью или переменной скоростью и могут быть синхронными или асинхронными. Универсальные двигатели могут работать как от переменного тока, так и от постоянного тока.
Блок управления двигателем
Двигатели переменного тока с фиксированной скоростью снабжены пускателями прямого и плавного пуска.
Электродвигатели переменного тока с регулируемой частотой вращения оснащены различными инверторами мощности, частотно-регулируемым или электронным коммутатором.
Термин электронный коммутатор обычно связан с самокоммутируемым бесщеточным двигателем постоянного тока и переключаемыми двигателями с сопротивлением.
Основные категории
Электродвигатели работают на трех различных физических принципах: магнетизм, электростатика и пьезоэлектричество. Безусловно, наиболее распространенным является магнетизм.
В магнитных двигателях образуются магнитные поля как ротора, так и статора. Продукт между этими двумя полями вызывает силу и, следовательно, крутящий момент на валу двигателя. Один или оба из этих полей должны быть изменены с поворотом двигателя. Это делается путем включения и выключения полюсов в нужное время или изменения силы полюса.
Основными типами являются двигатели постоянного тока и двигатели переменного тока, причем первые все чаще перемещаются последним.
Электродвигатели переменного тока являются либо асинхронными, либо синхронными.
После запуска синхронный двигатель требует синхронизации с синхронной скоростью движущегося магнитного поля для всех условий нормального крутящего момента.
В синхронных машинах магнитное поле должно быть обеспечено с помощью иных средств, чем индукция, например, от отдельно возбужденных обмоток или постоянных магнитов.
Двигатель с дробной мощностью (FHP) имеет рейтинг ниже 1 лошадиной силы (0,746 кВт) или изготовлен со стандартным размером кадра, меньшим, чем стандартный двигатель 1 л.с. Многие бытовые и промышленные двигатели находятся в классе дробных лошадей.
Сокращения:
BLAC — Бесщеточный AC
BLDC — Бесщеточный DC
BLDM — бесщеточный двигатель постоянного тока
EC — электронный коммутатор
PM — постоянный магнит
IPMSM — Внутренний синхронный двигатель с постоянными магнитами
PMSM — синхронный двигатель с постоянным магнитом
SPMSM — Синхронный двигатель с постоянным магнитом на поверхности
SCIM — Асинхронный двигатель с короткозамкнутым ротором
SRM — Электродвигатель с переключаемым сопротивлением
SyRM — синхронный двигатель сопротивления
VFD — Преобразователь частоты
WRIM — Асинхронный двигатель с поврежденным ротором
WRSM — синхронный двигатель с поврежденным ротором
LRA — Блокированные роторные усилители: ток, который вы можете ожидать при пусковых условиях при приложении полного напряжения. Это происходит мгновенно во время запуска.
RLA — Номинальные нагрузки: максимальный ток, который двигатель должен потреблять при любых условиях эксплуатации. Часто ошибочно называемый ходовой усилитель, который заставляет людей поверить, неправильно, что двигатель должен всегда тянуть эти усилители.
FLA — усилители полной нагрузки: изменен в 1976 году на «RLA — номинальные нагрузки».
Автомодулированный двигатель
Машинный двигатель постоянного тока
По определению, все самокоммутируемые двигатели постоянного тока работают от постоянного тока. Большинство двигателей постоянного тока являются малыми типами постоянного магнита (PM). Они содержат внутреннюю механическую коммутацию с маховиком, чтобы обменивать ток обмоток двигателя синхронно с вращением.
Электродвигатель постоянного тока
Коммутируемый двигатель постоянного тока имеет набор вращающихся обмоток, намотанных на якорь, установленный на вращающемся валу. На валу также имеется коммутатор, долговременный поворотный электрический выключатель, который периодически меняет поток тока в обмотках ротора при вращении вала. Таким образом, каждый мостовой двигатель постоянного тока имеет переменный ток, проходящий через вращающиеся обмотки. Ток протекает через одну или несколько пар щеток, которые несут на коммутаторе; щеточки соединяют внешний источник электроэнергии с вращающейся арматурой.
Вращающаяся арматура состоит из одной или нескольких катушек проволоки, намотанной вокруг ламинированного магнитомягкого ферромагнитного сердечника. Ток от щетки протекает через коммутатор и одну обмотку якоря, делая его временным магнитом (электромагнитом). Магнитное поле, создаваемое якорем, взаимодействует со стационарным магнитным полем, создаваемым либо ПМ, либо другой обмоткой (полевой катушкой), как часть каркаса двигателя. Сила между двумя магнитными полями имеет тенденцию вращать вал двигателя. Коммутатор переключает питание на катушки при повороте ротора, удерживая магнитные полюса ротора от когда-либо полностью совпадающего с магнитными полюсами поля статора, так что ротор никогда не останавливается (как стрелка компаса), а скорее вращается до тех пор, пока применяется питание.
Многие из ограничений классического двигателя постоянного тока коммутатора обусловлены необходимостью щеток нажимать на коммутатор. Это создает трение. Искры создаются цепями изготовления и разрушения щеток через катушки ротора, когда кисти пересекают изоляционные промежутки между участками коммутатора. В зависимости от конструкции коммутатора это может включать в себя кисти, замыкающие вместе соседние секции — и, следовательно, концы катушек — мгновенно, в то время как пересекают промежутки. Кроме того, индуктивность катушек ротора приводит к тому, что напряжение на каждом из них поднимается, когда его цепь открыта, увеличивая искру щетки. Это искрообразование ограничивает максимальную скорость машины, так как слишком быстрое искрообразование перегревает, размывает или даже расплавляет коммутатор. Плотность тока на единицу площади щеток в сочетании с их удельным сопротивлением ограничивает выход двигателя. Изготовление и размыкание электрического контакта также создает электрический шум; искрообразование генерирует RFI. Щетки в конце концов изнашиваются и требуют замены, и сам коммутатор подвержен износу и обслуживанию (на больших двигателях) или замене (на малых двигателях). Комбинация коммутатора на большом двигателе является дорогостоящим элементом, требующим точной сборки многих деталей. На небольших двигателях коммутатор обычно постоянно встроен в ротор, поэтому замена его обычно требует замены всего ротора.
Хотя большинство коммутаторов являются цилиндрическими, некоторые из них представляют собой плоские диски, состоящие из нескольких сегментов (как правило, не менее трех), установленных на изоляторе.
Большие щетки желательны для большей площади контакта щетки, чтобы максимизировать мощность двигателя, но небольшие щеточки желательны для малой массы, чтобы максимизировать скорость, с которой двигатель может работать, без чрезмерного отскока и искрения щеток. (Маленькие щетки также желательны для более низкой стоимости.) Более жесткие пружины для щеток также могут использоваться для создания щеток заданной массы на более высокой скорости, но за счет больших потерь на трение (меньшая эффективность) и износа ускоренной щетки и коммутатора. Поэтому конструкция электродвигателя постоянного тока влечет за собой компромисс между выходной мощностью, скоростью и эффективностью / износом.
Машины постоянного тока определяются следующим образом:
Схема арматуры — обмотка, в которой переносится ток нагрузки, который может быть неподвижной или вращающейся частью двигателя или генератора.
Полевая схема — набор обмоток, создающих магнитное поле, так что электромагнитная индукция может иметь место в электрических машинах.
Коммутация. Механическая техника, в которой может быть достигнута ректификация, или из которой может быть получен DC, в машинах постоянного тока.
Существует пять типов электродвигателей постоянного тока: —
Электродвигатель с шунтовой намоткой DC
Электродвигатель постоянного тока постоянного тока
Комбинированный двигатель постоянного тока (две конфигурации):
Кумулятивное соединение
Дифференциально усугубляется
Двигатель постоянного тока PM (не показан)
Отдельно возбужденный (не показан).
Двигатель постоянного магнита постоянного тока
Двигатель ПМ (постоянный магнит) не имеет обмотки возбуждения на раме статора, вместо этого полагаясь на ПМ, чтобы обеспечить магнитное поле, с которым взаимодействует поле ротора, для создания крутящего момента. Компенсирующие обмотки последовательно с арматурой могут использоваться на больших двигателях для улучшения коммутации под нагрузкой. Поскольку это поле исправлено, его нельзя настроить для управления скоростью. Поля PM (статоры) удобны в миниатюрных двигателях, чтобы исключить потребление энергии обмотки. Большинство двигателей постоянного тока имеют тип «динамо», которые имеют обмотки статора. Исторически сложилось так, что ТМ не могли быть использованы для сохранения высокого потока, если они были разобраны; полевые обмотки были более практичными для получения необходимого количества потока. Однако большие ТЧ являются дорогостоящими, а также опасными и трудными для сборки; это способствует раневым полям для больших машин.
Для минимизации общего веса и размера миниатюрные двигатели PM могут использовать магниты с высокой энергией, изготовленные из неодима или других стратегических элементов; большинство из них — неодимово-железо-борный сплав. С их более высокой плотностью потока электрические машины с высокоэнергетическими ПМ не менее конкурентоспособны со всеми оптимально разработанными одноразовыми синхронными и индукционными электрическими машинами. Миниатюрные двигатели напоминают конструкцию на иллюстрации, за исключением того, что у них есть по крайней мере три полюса ротора (чтобы обеспечить запуск, независимо от положения ротора), а их внешний корпус представляет собой стальную трубку, которая магнитно соединяет экстерьеры изогнутых магнитов поля.
Электродвигатель с электронным коммутатором (EC)
Бесщеточный двигатель постоянного тока
Некоторые проблемы с мотором постоянного тока устраняются в конструкции BLDC. В этом двигателе механический «поворотный переключатель» или коммутатор заменяется внешним электронным переключателем, синхронизированным с положением ротора. Двигатели BLDC обычно на 85-90% эффективны или более. Сообщалось о эффективности для двигателя BLDC до 96,5%, в то время как двигатели постоянного тока с щеткой обычно составляют 75-80%.
Характерная форма трапецеидальной противоэлектродвижущей силы (CEMF) двигателя BLDC происходит частично от обмотки статора, равномерно распределенной, а частично от размещения постоянных магнитов ротора. Также известный как электронно-коммутируемый постоянный или внутренний двигатель постоянного тока, обмотки статора трапециевидных двигателей BLDC могут быть однофазными, двухфазными или трехфазными и использовать датчики эффекта Холла, установленные на их обмотках для определения положения ротора и низкой стоимости закрытых -увеличение управления электронным коммутатором.
Двигатели BLDC обычно используются там, где требуется точное управление скоростью, например, в компьютерных дисках или в кассетных магнитофонах, шпиндели на дисках CD, CD-ROM (и т. Д.) И механизмы внутри офисных продуктов, такие как вентиляторы, лазерные принтеры и копировальные машины. Они имеют несколько преимуществ перед обычными двигателями:
По сравнению с вентиляторами переменного тока, использующими двигатели с заштрихованным полюсом, они очень эффективны, работают намного холоднее, чем эквивалентные двигатели переменного тока. Эта холодная операция приводит к значительному улучшению срока службы подшипников вентилятора.
Без отключения коммутатора срок службы двигателя BLDC может быть значительно больше по сравнению с двигателем постоянного тока с использованием щеток и коммутатора. Коммутация также имеет тенденцию вызывать большой электрический и радиочастотный шум; без коммутатора или щеток, двигатель BLDC может использоваться в электрически чувствительных устройствах, таких как аудиооборудование или компьютеры.
Те же датчики эффекта Холла, которые обеспечивают коммутацию, также могут обеспечить удобный сигнал тахометра для приложений с замкнутым контуром (с сервоуправлением). В вентиляторах сигнал тахометра может использоваться для получения сигнала «fan OK», а также для обеспечения обратной связи по скорости.
Мотор можно легко синхронизировать с внутренними или внешними часами, что обеспечивает точное управление скоростью.
Двигатели BLDC не имеют возможности искрообразования, в отличие от мостовых двигателей, что делает их лучше подходящими для окружающей среды с летучими химическими веществами и топливом. Кроме того, искрение создает озон, который может накапливаться в плохо вентилируемых зданиях, рискуя причинить вред здоровью пассажиров.
Двигатели BLDC обычно используются в небольшом оборудовании, таком как компьютеры, и обычно используются в вентиляторах, чтобы избавиться от нежелательного тепла.
Они также являются акустически очень тихими двигателями, что является преимуществом при использовании в оборудовании, на которое влияют вибрации.
Современные двигатели BLDC имеют мощность от доли ватт до многих киловатт. Большие двигатели BLDC мощностью до 100 кВт используются в электромобилях. Они также находят значительное применение в высокопроизводительных электрических моделях самолетов.
Электродвигатель с переключаемым сопротивлением
SRM не имеет щеток или постоянных магнитов, а ротор не имеет электрических токов. Вместо этого крутящий момент возникает из-за небольшого несоосности полюсов на роторе с полюсами на статоре. Ротор выравнивается с магнитным полем статора, в то время как обмотки возбуждения статора последовательно возбуждаются, чтобы вращать поле статора.
Магнитный поток, создаваемый обмотками возбуждения, следует по пути наименьшего магнитного сопротивления, что означает, что поток будет проходить через полюсы ротора, которые ближе всего к полюсам возбуждения статора, тем самым намагничивая эти полюса ротора и создавая крутящий момент. По мере того, как ротор вращается, различные обмотки будут под напряжением, поддерживая поворот ротора.
SRM используются в некоторых устройствах и транспортных средствах.
Универсальный двигатель переменного / постоянного тока
Коммутируемая электрически возбужденная серия или двигатель с параллельной намоткой называется универсальным двигателем, поскольку он может быть спроектирован для работы от сети переменного или постоянного тока. Универсальный двигатель может хорошо работать на переменном токе, потому что ток как в поле, так и в катушках якоря (и, следовательно, в возникающих магнитных полях) будет чередоваться (обратная полярность) синхронно, и, следовательно, возникающая механическая сила будет происходить в постоянном направлении вращения ,
Работая на нормальных частотах линий электропередачи, универсальные двигатели часто находятся в диапазоне менее 1000 Вт. Универсальные двигатели также легли в основу традиционного железнодорожного тягового двигателя в электрических железных дорогах. В этом приложении использование переменного тока для питания двигателя, первоначально спроектированного для работы на постоянном токе, приведет к потерям эффективности из-за нагрева вихревых токов их магнитных компонентов, в частности полюсов полюсов двигателя, которые для постоянного тока использовали бы твердое ( без ламинированного) железа, и в настоящее время они редко используются.
Преимущество универсального двигателя заключается в том, что источники питания переменного тока могут использоваться на двигателях, которые имеют более общие характеристики в двигателях постоянного тока, особенно высокий пусковой момент и очень компактную конструкцию, если используются высокие скорости движения. Отрицательным аспектом является поддержание и короткие жизненные проблемы, вызванные коммутатором. Такие двигатели используются в устройствах, таких как смесители для пищевых продуктов и электроинструменты, которые используются только периодически, и часто имеют высокие требования к стартовому крутящему моменту. Несколько кранов на катушке поля обеспечивают (неточную) ступенчатую регулировку скорости. Бытовые смесители, которые рекламируют многие скорости, часто объединяют полевую катушку с несколькими отводами и диод, который может быть вставлен последовательно с двигателем (заставляя двигатель работать на полуволновом выпрямленном переменном токе). Универсальные двигатели также поддаются электронному регулированию скорости и, как таковые, являются идеальным выбором для таких устройств, как бытовые стиральные машины. Мотор можно использовать для взбалтывания барабана (как вперед, так и назад) путем переключения обмотки возбуждения относительно якоря.
В то время как SCIM не могут поворачивать вал быстрее, чем допускается частотой линии электропередач, универсальные двигатели могут работать на гораздо более высоких скоростях. Это делает их полезными для таких приборов, как блендеры, пылесосы и фены, где требуется высокая скорость и малый вес. Они также широко используются в переносных электроинструментах, таких как сверла, шлифовальные станки, циркулярные и джип-пилы, где характеристики двигателя хорошо работают. Многие пылесосы и триммеры с сорняками превышают 10 000 об / мин, в то время как многие аналогичные миниатюрные шлифовальные машины превышают 30 000 об / мин.
Внешняя коммутируемая машина переменного тока
Конструкция индукционных и синхронных двигателей переменного тока оптимизирована для работы на однофазной или многофазной синусоидальной или квазисинусоидальной мощности сигнала, например, для приложений с фиксированной скоростью от сети переменного тока переменного тока или для применения с переменной скоростью от контроллеров VFD. Электродвигатель переменного тока имеет две части: стационарный статор, имеющий катушки, снабженные переменным током для создания вращающегося магнитного поля, и ротор, прикрепленный к выходному валу, которому задан крутящий момент вращающимся полем.
Индукционный двигатель
Асинхронный двигатель с сердечником и раневым ротором
Асинхронный двигатель представляет собой асинхронный двигатель переменного тока, где мощность передается ротору электромагнитной индукцией, подобно действию трансформатора. Асинхронный двигатель напоминает вращающийся трансформатор, потому что статор (неподвижная часть) по существу является первичной стороной трансформатора, а ротор (вращающаяся часть) является вторичной стороной. Многофазные асинхронные двигатели широко используются в промышленности.
Асинхронные двигатели могут быть дополнительно разделены на индукционные двигатели с короткозамкнутым ротором и индукционные двигатели роторного ротора (WRIM). SCIM имеют тяжелую обмотку, состоящую из сплошных стержней, обычно из алюминия или меди, соединенных кольцами на концах ротора. Когда вы рассматриваете только бары и кольца в целом, они очень похожи на вращающуюся клетку для упражнений животного, отсюда и название.
Токи, индуцированные в этой обмотке, обеспечивают магнитное поле ротора. Форма роторных стержней определяет характеристики крутящего момента. На низких скоростях ток, индуцированный в клетке белка, почти на частоте линии и, как правило, находится во внешних частях клетки ротора. По мере того, как двигатель разгоняется, частота скольжения становится ниже, и больше тока находится внутри обмотки. При формовании стержней для изменения сопротивления намоточных частей во внутренней и внешней частях сепаратора эффективно встраивается переменное сопротивление в цепь ротора. Однако большинство таких двигателей имеют одинаковые стержни.
В WRIM обмотка ротора состоит из многих витков изолированного провода и соединена с кольцами скольжения на валу двигателя. В цепи ротора можно подключить внешний резистор или другие управляющие устройства. Резисторы позволяют контролировать скорость двигателя, хотя значительная мощность рассеивается во внешнем сопротивлении. Преобразователь можно подавать из цепи ротора и возвращать мощность частоты скольжения, которая иначе была бы потеряна обратно в систему питания через инвертор или отдельный двигатель-генератор.
WRIM используется в первую очередь для запуска высокой инерционной нагрузки или нагрузки, которая требует очень высокого пускового момента в полном диапазоне скоростей. Правильно выбирая резисторы, используемые в стартере вторичного сопротивления или стартера, двигатель способен производить максимальный крутящий момент при относительно низком токе питания от нулевой скорости до полной скорости. Этот тип двигателя также обеспечивает контролируемую скорость.
Скорость двигателя можно изменить, потому что кривая крутящего момента двигателя эффективно изменяется на величину сопротивления, подключенного к цепи ротора. Увеличение значения сопротивления приведет к уменьшению скорости максимального крутящего момента. Если сопротивление, связанное с ротором, увеличивается за пределами точки, где максимальный крутящий момент происходит с нулевой скоростью, крутящий момент будет далее уменьшен.
При использовании с нагрузкой, которая имеет кривую крутящего момента, которая увеличивается со скоростью, двигатель будет работать на скорости, когда крутящий момент, развиваемый двигателем, равен крутящему моменту нагрузки. Уменьшение нагрузки приведет к тому, что двигатель ускорится, а увеличение нагрузки приведет к замедлению двигателя до тех пор, пока нагрузка и крутящий момент двигателя не будут равны. Таким образом, потери скольжения рассеиваются во вторичных резисторах и могут быть очень значительными. Регулирование скорости и чистая эффективность также очень низки.
Моментный двигатель
Мотор с крутящим моментом представляет собой специализированную форму электродвигателя, которая может работать бесконечно при остановке, т. Е. Когда ротор заблокирован от поворота, без каких-либо повреждений. В этом режиме работы двигатель будет применять устойчивый крутящий момент к нагрузке (отсюда и название).
Общее применение мотора с крутящим моментом было бы двигателем подающей и приемной катушки в ленточном накопителе. В этом приложении, приводимом в действие от низкого напряжения, характеристики этих двигателей позволяют относительно постоянное световое натяжение прикладываться к ленте независимо от того, подает ли лента лента за головки ленты. Двигатели с крутящим моментом, управляемые более высоким напряжением (и, таким образом, обеспечивающие более высокий крутящий момент), также могут выполнять ускоренную перемотку вперед и назад, не требуя каких-либо дополнительных механических механизмов, таких как шестерни или муфты. В мире компьютерных игр крутящие моторы используются в рулях с обратной связью с обратной связью.
Другим распространенным применением является управление дросселем двигателя внутреннего сгорания в сочетании с электронным регулятором. При этом использовании двигатель работает против возвратной пружины для перемещения дроссельной заслонки в соответствии с выходом регулятора. Последний контролирует обороты двигателя путем подсчета электрических импульсов от системы зажигания или от магнитного датчика и, в зависимости от скорости, делает небольшие корректировки величины тока, приложенного к двигателю. Если двигатель начинает замедляться относительно желаемой скорости, ток будет увеличен, двигатель будет развивать больше крутящего момента, потянув за возвратную пружину и открыв дроссель. Если двигатель работает слишком быстро, регулятор уменьшает ток, подаваемый на двигатель, заставляя возвратную пружину отступать и закрывать дроссель.
Синхронный двигатель
Синхронный электродвигатель представляет собой двигатель переменного тока, отличающийся ротором, вращающимся с магнитами, проходящими через катушки, с той же скоростью, что и переменный ток, и приводящее к магнитному полю, которое его возбуждает. Другой способ сказать это то, что он имеет нулевое скольжение при обычных условиях эксплуатации. Сравните это с асинхронным двигателем, который должен проскользнуть, чтобы создать крутящий момент. Один тип синхронного двигателя похож на асинхронный двигатель, за исключением того, что ротор возбуждается полем постоянного тока. Для проведения тока к ротору используются скользящие кольца и щетки. Полюсы ротора соединяются друг с другом и движутся с той же скоростью, что и название синхронного двигателя. Другой тип, для низкого крутящего момента нагрузки, имеет плоские поверхности на обычном роторе с короткозамкнутым ротором для создания дискретных полюсов. Еще один, например, сделанный Хаммондом для часов до Второй мировой войны, и в более старых органах Хаммонда, не имеет витков ротора и дискретных полюсов. Он не запускается самостоятельно. Часы требуют ручного запуска с помощью маленькой ручки на задней панели, в то время как у более старых органов Хаммонда был вспомогательный пусковой двигатель, подключенный подпружиненным ручным переключателем.
Наконец, синхронные двигатели с гистерезисом обычно представляют собой (по существу) двухфазные двигатели с фазосдвигающим конденсатором для одной фазы. Они начинаются как асинхронные двигатели, но когда скорость скольжения уменьшается достаточно, ротор (гладкий цилиндр) временно намагничивается. Его распределенные полюса заставляют его действовать как синхронный двигатель с постоянными магнитами (PMSM). Материал ротора, как и обычный гвоздь, будет оставаться намагниченным, но также может быть размагничен с небольшими трудностями. После запуска полюса ротора остаются на месте; они не дрейфуют.
Мощные синхронные моторы с синхронизацией (например, для традиционных электрических часов) могут иметь многополюсные постоянные роторы постоянных магнитов и использовать заслонки для обеспечения пускового момента. Электродвигатели с тактовой частотой имеют заштрихованные полюса для пускового момента и двухспицевый кольцевой ротор, который работает как дискретный двухполюсный ротор.
Электрическая машина с двойным питанием
Электродвигатели с двойным питанием имеют два независимых многофазных намоточных устройства, которые вносят активную (то есть рабочую) мощность в процесс преобразования энергии, причем, по меньшей мере, один из наборов намотки электронным образом управляется для работы с переменной скоростью. Два независимых многофазных намотки (т. Е. Двойная арматура) являются максимальными, предусмотренными в одном пакете без дублирования топологии. Электродвигатели с двойным питанием представляют собой машины с эффективным диапазоном скоростей крутящего момента, который является двойной синхронной скоростью для данной частоты возбуждения. Это в два раза больше диапазона крутящего момента с постоянным крутящим моментом в качестве однонаправленных электрических машин, которые имеют только одну активную намотку.
Двигатель с двойным питанием позволяет использовать меньший электронный преобразователь, но стоимость намотки и скольжения ротора может компенсировать экономию компонентов силовой электроники. Трудности с управляющей скоростью вблизи приложений с ограничением скорости.