एक इलेक्ट्रिक मोटर एक विद्युत मशीन है जो विद्युत ऊर्जा को यांत्रिक ऊर्जा में परिवर्तित करती है। अधिकांश इलेक्ट्रिक मोटर मोटर के चुंबकीय क्षेत्र और घुमावदार धाराओं के बीच घूर्णन के रूप में बल उत्पन्न करने के बीच बातचीत के माध्यम से काम करते हैं। इलेक्ट्रिक मोटर सीधे चालू (डीसी) स्रोतों, जैसे बैटरी, मोटर वाहन या रेक्टिफायर, या वर्तमान (एसी) स्रोतों जैसे कि पावर ग्रिड, इनवर्टर या इलेक्ट्रिकल जेनरेटर द्वारा संचालित किया जा सकता है। एक विद्युत जनरेटर यांत्रिक रूप से एक इलेक्ट्रिक मोटर के समान होता है, लेकिन यांत्रिक ऊर्जा (जैसे बहने वाले पानी) को स्वीकार करने और विद्युत ऊर्जा को विद्युत ऊर्जा में परिवर्तित करने के विपरीत दिशा में कार्य करता है।
इलेक्ट्रिक मोटर को बिजली स्रोत प्रकार, आंतरिक निर्माण, अनुप्रयोग और गति आउटपुट के प्रकार जैसे विचारों द्वारा वर्गीकृत किया जा सकता है। एसी बनाम डीसी प्रकारों के अलावा, मोटर ब्रश या ब्रशलेस हो सकते हैं, विभिन्न चरण (एकल चरण, दो चरण, या तीन चरण देखें) हो सकता है, और या तो एयर कूल्ड या तरल ठंडा हो सकता है। मानक आयामों और विशेषताओं वाले सामान्य उद्देश्य मोटर औद्योगिक उपयोग के लिए सुविधाजनक यांत्रिक शक्ति प्रदान करते हैं। जहाजों के प्रणोदन, पाइपलाइन संपीड़न और पंप-स्टोरेज अनुप्रयोगों के लिए सबसे बड़ा इलेक्ट्रिक मोटर का उपयोग 100 मेगावाट तक पहुंचने वाली रेटिंग के साथ किया जाता है। औद्योगिक प्रशंसकों, blowers और पंप, मशीन टूल्स, घरेलू उपकरणों, बिजली उपकरण और डिस्क ड्राइव में इलेक्ट्रिक मोटर पाए जाते हैं। बिजली के घड़ियों में छोटे मोटर्स पाए जा सकते हैं।
कुछ अनुप्रयोगों में, जैसे ट्रैक्शन मोटर्स के साथ पुनर्जागरण ब्रेकिंग में, इलेक्ट्रिक मोटर का उपयोग ऊर्जा के लिए जेनरेटर के रूप में उल्टा में किया जा सकता है जो अन्यथा गर्मी और घर्षण के रूप में खो जा सकता है।
इलेक्ट्रिक मोटर रैखिक या रोटरी बल (टोक़) का उत्पादन करते हैं और चुंबकीय solenoids और लाउडस्पीकर जैसे उपकरणों से अलग किया जा सकता है जो बिजली को गति में परिवर्तित करते हैं लेकिन उपयोग करने योग्य यांत्रिक बल उत्पन्न नहीं करते हैं, जिन्हें क्रमशः एक्ट्यूएटर और ट्रांसड्यूसर के रूप में जाना जाता है।
अवयव
रोटार
एक इलेक्ट्रिक मोटर में, चलती हिस्सा रोटर है, जो यांत्रिक शक्ति को वितरित करने के लिए शाफ्ट को बदल देती है। रोटर में आम तौर पर वाहक होते हैं जो धाराओं को लेते हैं, जो शाफ्ट को बदलने वाली ताकतों को उत्पन्न करने के लिए स्टेटर के चुंबकीय क्षेत्र से बातचीत करते हैं। वैकल्पिक रूप से, कुछ रोटर्स स्थायी चुंबक लेते हैं, और स्टेटर कंडक्टर रखता है।
बियरिंग्स
रोटर बीयरिंग द्वारा समर्थित है, जो रोटर को अपनी धुरी को चालू करने की अनुमति देता है। बियरिंग्स बदले में मोटर आवास द्वारा समर्थित हैं। मोटर शाफ्ट बीयरिंग के माध्यम से मोटर के बाहर फैली हुई है, जहां लोड लागू होता है। चूंकि लोड की ताकत बाहरीतम असर से परे होती है, इसलिए लोड को ओवरहांग कहा जाता है।
स्टेटर
स्टेटर मोटर के विद्युत चुम्बकीय सर्किट का स्थिर हिस्सा है और आमतौर पर या तो विंडिंग या स्थायी चुंबक होते हैं। स्टेटर कोर कई पतली धातु चादरों से बना है, जिन्हें टुकड़े टुकड़े कहा जाता है। टुकड़ों का उपयोग ऊर्जा हानियों को कम करने के लिए किया जाता है जिसके परिणामस्वरूप एक ठोस कोर का उपयोग किया जाता है।
हवा के लिए स्थान
रोटर और स्टेटर के बीच की दूरी को हवा का अंतर कहा जाता है। वायु अंतराल के महत्वपूर्ण प्रभाव होते हैं, और आम तौर पर जितना संभव हो उतना छोटा होता है, क्योंकि बड़े अंतर के प्रदर्शन पर एक मजबूत नकारात्मक प्रभाव पड़ता है। यह कम शक्ति कारक का मुख्य स्रोत है जिस पर मोटर्स संचालित होते हैं। हवा के अंतर के साथ चुंबकीय वर्तमान बढ़ता है। इस कारण से, हवा का अंतर न्यूनतम होना चाहिए। शोर और नुकसान के अलावा बहुत कम अंतराल यांत्रिक समस्याएं उत्पन्न कर सकते हैं।
घुमावदार
विंडिंग्स तार होते हैं जो कॉइल्स में रखे जाते हैं, आमतौर पर एक टुकड़े टुकड़े वाले नरम लौह चुंबकीय कोर के चारों ओर लपेटा जाता है ताकि चुंबकीय ध्रुवों को वर्तमान में सक्रिय किया जा सके।
इलेक्ट्रिक मशीन दो बुनियादी चुंबक क्षेत्र ध्रुव विन्यास में आती हैं: मुख्य- और गैर-ध्रुव-ध्रुव विन्यास। मुख्य ध्रुव मशीन में ध्रुव के चुंबकीय क्षेत्र को ध्रुव के चेहरे के नीचे ध्रुव के चारों ओर एक घुमावदार घाव द्वारा उत्पादित किया जाता है। गैर-ध्रुव, या वितरित क्षेत्र, या गोल-रोटर, मशीन में, घुमावदार ध्रुव चेहरे के स्लॉट में वितरित किया जाता है। एक छायांकित ध्रुव मोटर ध्रुव के हिस्से के चारों ओर घूमती है जो उस ध्रुव के लिए चुंबकीय क्षेत्र के चरण में देरी करती है।
कुछ मोटरों में कंडक्टर होते हैं जिनमें मोटे धातु होते हैं, जैसे कि धातु के सलाखों या चादरें, आमतौर पर तांबा, वैकल्पिक रूप से एल्यूमीनियम। ये आमतौर पर विद्युत चुम्बकीय प्रेरण द्वारा संचालित होते हैं।
कम्यूटेटर
एक कम्यूटेटर एक डीसी मशीनों और कुछ एसी मशीनों के इनपुट को स्विच करने के लिए उपयोग की जाने वाली एक तंत्र है। इसमें एक दूसरे से और शाफ्ट से इन्सुलेट पर्ची-अंगूठी खंड होते हैं। मोटर के आर्मेचर वर्तमान को घुमावदार कम्यूटेटर के संपर्क में स्थिर ब्रश के माध्यम से आपूर्ति की जाती है, जिसके कारण वर्तमान उलटा होने की आवश्यकता होती है, और रोटर को ध्रुव से ध्रुव तक घुमाने के रूप में मशीन को इष्टतम तरीके से शक्ति लागू होती है। इस तरह के मौजूदा उलटा होने की अनुपस्थिति में, मोटर एक स्टॉप पर ब्रेक हो जाएगी। इलेक्ट्रॉनिक नियंत्रक, सेंसरलेस-कंट्रोल, प्रेरण-मोटर, और स्थायी चुंबक-मोटर क्षेत्रों में बेहतर प्रौद्योगिकियों के प्रकाश में, बाहरी रूप से कम्यूटेटेड प्रेरण और स्थायी चुंबक मोटर इलेक्ट्रोमेकैनिकल-कम्यूटेटेड मोटरों को विस्थापित कर रहे हैं।
मोटर आपूर्ति और नियंत्रण
मोटर आपूर्ति
एक डीसी मोटर आमतौर पर ऊपर वर्णित पर्ची रिंग कम्यूटेटर के माध्यम से आपूर्ति की जाती है। एसी मोटर ‘कमीशन या तो स्लिप रिंग कम्यूटेटर या बाहरी रूप से कम्यूटेटेड प्रकार हो सकता है, निश्चित गति या चर-गति नियंत्रण प्रकार हो सकता है, और सिंक्रोनस या असिंक्रोनस प्रकार हो सकता है। यूनिवर्सल मोटर या तो एसी या डीसी पर चल सकते हैं।
मोटर नियंत्रण
फिक्स्ड-स्पीड नियंत्रित एसी मोटर सीधे-ऑन-लाइन या सॉफ्ट-स्टार्ट स्टार्टर्स प्रदान किए जाते हैं।
परिवर्तनीय-गति नियंत्रित एसी मोटर विभिन्न पावर इन्वर्टर, चर-आवृत्ति ड्राइव या इलेक्ट्रॉनिक कम्यूटेटर प्रौद्योगिकियों की एक श्रृंखला के साथ प्रदान की जाती हैं।
इलेक्ट्रॉनिक कम्यूटेटर शब्द आमतौर पर स्व-कम्यूटेड ब्रशलेस डीसी मोटर और स्विच अनिच्छा मोटर अनुप्रयोगों से जुड़ा होता है।
प्रमुख श्रेणियां
इलेक्ट्रिक मोटर तीन अलग-अलग भौतिक सिद्धांतों पर काम करते हैं: चुंबकत्व, इलेक्ट्रोस्टैटिक्स और पायजोइलेक्ट्रिकिटी। अब तक, सबसे आम चुंबकत्व है।
चुंबकीय मोटर्स में, रोटर और स्टेटर दोनों में चुंबकीय क्षेत्र बनते हैं। इन दो क्षेत्रों के बीच उत्पाद एक बल को जन्म देता है, और इस प्रकार मोटर शाफ्ट पर एक टोक़ देता है। इन क्षेत्रों में से एक, या दोनों मोटर के घूर्णन के साथ बदलने के लिए किया जाना चाहिए। यह सही समय पर ध्रुवों को चालू और बंद करके, या ध्रुव की ताकत को बदलकर किया जाता है।
मुख्य प्रकार डीसी मोटर और एसी मोटर हैं, जो पूर्व में बाद में विस्थापित हो रहे हैं।
एसी इलेक्ट्रिक मोटर या तो असीमित या तुल्यकालिक हैं।
एक बार शुरू होने के बाद, एक सिंक्रोनस मोटर को सभी सामान्य टोक़ स्थितियों के लिए चलती चुंबकीय क्षेत्र की तुल्यकालिक गति के साथ सिंक्रनाइज़ेशन की आवश्यकता होती है।
सिंक्रोनस मशीनों में, चुंबकीय क्षेत्र को अलग-अलग उत्साहित विंडिंग्स या स्थायी चुंबक जैसे प्रेरण के अलावा अन्य साधनों द्वारा प्रदान किया जाना चाहिए।
एक आंशिक-हॉर्स पावर (एफएचपी) मोटर के पास या तो 1 अश्वशक्ति (0.746 किलोवाट) से नीचे की रेटिंग है, या मानक 1 एचपी मोटर से मानक मानक फ्रेम आकार के साथ निर्मित है। कई घरेलू और औद्योगिक मोटर आंशिक-अश्वशक्ति वर्ग में हैं।
लघुरूप:
बीएलएसी – ब्रशलेस एसी
बीएलडीसी – ब्रशलेस डीसी
बीएलडीएम – ब्रशलेस डीसी मोटर
ईसी – इलेक्ट्रॉनिक कम्यूटेटर
पीएम – स्थायी चुंबक
आईपीएमएसएम – आंतरिक स्थायी चुंबक तुल्यकालिक मोटर
पीएमएसएम – स्थायी चुंबक तुल्यकालिक मोटर
एसपीएमएसएम – सतह स्थायी चुंबक तुल्यकालिक मोटर
एससीआईएम – गिलहरी-पिंजरे प्रेरण मोटर
एसआरएम – स्विच अनिच्छा मोटर
सीआईआरएम – सिंक्रोनस अनिच्छा मोटर
वीएफडी – परिवर्तनीय आवृत्ति ड्राइव
WRIM – घाव-रोटर प्रेरण मोटर
डब्लूआरएसएम – घाव-रोटर सिंक्रोनस मोटर
एलआरए – लॉक-रोटर एम्प्स: जब आप पूर्ण वोल्टेज लागू करते हैं तो वर्तमान स्थिति के तहत आप अपेक्षा कर सकते हैं। यह स्टार्ट-अप के दौरान तुरंत होता है।
आरएलए – रेटेड-लोड एएमपीएस: किसी भी ऑपरेटिंग परिस्थितियों में अधिकतम मोटर को चालू करना चाहिए। अक्सर गलती से रन-लोड एएमपीएस कहा जाता है, जो लोगों को विश्वास करने के लिए प्रेरित करता है, गलत है कि मोटर हमेशा इन एएमपीएस खींच लेनी चाहिए।
एफएलए – पूर्ण लोड एएमपीएस: 1 9 76 में “आरएलए – रेटेड लोड एम्प्स” में बदल गया।
स्व-चालित मोटर
ब्रश डीसी मोटर
परिभाषा के अनुसार, सभी स्वयं-कम्यूटेटेड डीसी मोटर डीसी विद्युत शक्ति पर चलते हैं। अधिकांश डीसी मोटर छोटे स्थायी चुंबक (पीएम) प्रकार होते हैं। उनमें रोटेशन के साथ सिंक्रनाइज़ेशन में मोटर विंडिंग्स के मौजूदा रिवर्स को रिवर्स करने के लिए एक ब्रश आंतरिक यांत्रिक कमीशन शामिल है।
विद्युत रूप से उत्साहित डीसी मोटर
एक कम्यूटेटेड डीसी मोटर में घुमावदार शाफ्ट पर घुड़सवार एक आर्मेचर पर घुमावदार घुमावदार घाव का एक सेट होता है। शाफ्ट में कम्यूटेटर, एक लंबे समय तक चलने वाला रोटरी इलेक्ट्रिकल स्विच होता है जो शाफ्ट घुमाने के रूप में रोटर विंडिंग्स में समय-समय पर प्रवाह के प्रवाह को उलट देता है। इस प्रकार, प्रत्येक ब्रश डीसी मोटर एसी अपने घुमावदार windings के माध्यम से बहती है। वर्तमान में ब्रश के एक या अधिक जोड़े के माध्यम से प्रवाह होता है जो कम्यूटेटर पर पड़ता है; ब्रश घूर्णन आर्मेचर के लिए विद्युत शक्ति का बाहरी स्रोत कनेक्ट करते हैं।
घुमावदार आर्मेचर में एक टुकड़े टुकड़े, चुंबकीय रूप से “नरम” फेरोमैग्नेटिक कोर के चारों ओर तार घाव के एक या अधिक कॉइल होते हैं। ब्रश से वर्तमान कम्यूटेटर और आर्मेचर की घुमाव के माध्यम से बहता है, जिससे यह एक अस्थायी चुंबक (एक विद्युत चुम्बकीय) बना देता है। आर्मेचर द्वारा उत्पादित चुंबकीय क्षेत्र मोटर फ्रेम के हिस्से के रूप में पीएम या अन्य घुमावदार (एक फील्ड कॉइल) द्वारा उत्पादित एक स्थिर चुंबकीय क्षेत्र के साथ बातचीत करता है। दो चुंबकीय क्षेत्रों के बीच बल मोटर शाफ्ट घुमाने के लिए जाता है। रोटर मोटर्स के रूप में बिजली को स्विच करता है क्योंकि रोटर बदल जाता है, रोटर के चुंबकीय ध्रुवों को स्टेटर फ़ील्ड के चुंबकीय ध्रुवों से पूरी तरह से संरेखित करने से रोकता है, ताकि रोटर कभी नहीं रुकता (एक कंपास सुई की तरह), बल्कि घूर्णन रखता है जब तक बिजली लागू होती है।
क्लासिक कम्यूटेटर डीसी मोटर की कई सीमाएं ब्रश के लिए कम्यूटेटर के खिलाफ प्रेस करने की आवश्यकता के कारण हैं। यह घर्षण बनाता है। रोशनी को रोटर कॉइल्स के माध्यम से सर्किट बनाने और तोड़ने के द्वारा बनाए जाते हैं क्योंकि ब्रश कम्यूटेटर अनुभागों के बीच इन्सुलेटिंग अंतराल को पार करते हैं। कम्यूटेटर डिज़ाइन के आधार पर, इसमें ब्रश को आसन्न वर्गों को एक साथ जोड़ना शामिल हो सकता है – और इसलिए कॉइल समाप्त होता है – क्षणिक रूप से अंतराल को पार करते समय। इसके अलावा, रोटर कॉइल्स का अधिष्ठापन प्रत्येक सर्किट खोले जाने पर वोल्टेज का कारण बनता है, ब्रश की चमक बढ़ता है। यह स्पार्किंग मशीन की अधिकतम गति को सीमित करती है, क्योंकि बहुत तेजी से चमकने से कम्यूटेटर गर्म हो जाएगा, खराब हो जाएगा, या यहां तक कि कम्यूटेटर पिघल जाएगा। ब्रश के प्रति यूनिट क्षेत्र की मौजूदा घनत्व, उनकी प्रतिरोधकता के संयोजन में, मोटर के आउटपुट को सीमित करती है। विद्युत संपर्क बनाने और तोड़ने से विद्युत शोर भी उत्पन्न होता है; स्पार्किंग आरएफआई उत्पन्न करता है। ब्रश अंततः पहनते हैं और प्रतिस्थापन की आवश्यकता होती है, और कम्यूटेटर स्वयं पहनने और रखरखाव (बड़े मोटर्स पर) या प्रतिस्थापन (छोटे मोटर्स पर) के अधीन होता है। एक बड़ी मोटर पर कम्यूटेटर असेंबली एक महंगा तत्व है, जिसके लिए कई हिस्सों की सटीक असेंबली की आवश्यकता होती है। छोटे मोटर्स पर, कम्यूटेटर आमतौर पर रोटर में स्थायी रूप से एकीकृत होता है, इसलिए इसे बदलने के लिए आमतौर पर पूरे रोटर को बदलने की आवश्यकता होती है।
जबकि अधिकांश कम्यूटेटर बेलनाकार होते हैं, कुछ फ्लैट डिस्क होते हैं जिनमें कई सेगमेंट होते हैं (आमतौर पर, कम से कम तीन) एक इंसुलेटर पर घुड़सवार होते हैं।
बड़े ब्रश मोटर आउटपुट को अधिकतम करने के लिए बड़े ब्रश संपर्क क्षेत्र के लिए वांछित होते हैं, लेकिन छोटे ब्रश कम द्रव्यमान के लिए वांछित होते हैं जिससे गति तेज हो जाती है जिस पर मोटर ब्रश के बिना अत्यधिक उछाल और चमकती हो सकती है। (छोटे ब्रश भी कम लागत के लिए वांछनीय हैं।) स्टिफ़र ब्रश स्प्रिंग्स का इस्तेमाल उच्च गति पर किसी दिए गए द्रव्यमान के काम को ब्रश करने के लिए भी किया जा सकता है, लेकिन अधिक घर्षण नुकसान (कम दक्षता) और त्वरित ब्रश और कम्यूटेटर पहनने की लागत पर। इसलिए, डीसी मोटर ब्रश डिजाइन आउटपुट पावर, गति, और दक्षता / पहनने के बीच एक व्यापार बंद है।
डीसी मशीनों को निम्नानुसार परिभाषित किया गया है:
आर्मेचर सर्किट – एक घुमाव जहां भार वर्तमान चल रहा है, जैसे कि मोटर या जनरेटर का स्थिर या घूर्णन हिस्सा हो सकता है।
फील्ड सर्किट – विंडिंग्स का एक सेट जो चुंबकीय क्षेत्र उत्पन्न करता है ताकि विद्युत मशीनों में इलेक्ट्रोमैग्नेटिक प्रेरण हो सके।
कम्यूटेशन: डीसी मशीनों में एक यांत्रिक तकनीक जिसमें सुधार को हासिल किया जा सकता है, या डीसी से प्राप्त किया जा सकता है।
ब्रश डीसी मोटर के पांच प्रकार हैं: –
डीसी शंट-घाव मोटर
डीसी श्रृंखला-घाव मोटर
डीसी कंपाउंड मोटर (दो विन्यास):
संचयी यौगिक
अलग-अलग मिश्रित
पीएम डीसी मोटर (दिखाया नहीं गया)
अलग उत्साहित (दिखाया नहीं गया)।
स्थायी चुंबक डीसी मोटर
एक पीएम (स्थायी चुंबक) मोटर में स्टेटर फ्रेम पर घुमावदार क्षेत्र नहीं होता है, बल्कि पीएम पर चुंबकीय क्षेत्र प्रदान करने के लिए निर्भर करता है जिसके खिलाफ रोटर क्षेत्र टोक़ का उत्पादन करने के लिए बातचीत करता है। आर्मेचर के साथ श्रृंखला में मुकाबला करने वाली हवाओं का उपयोग लोड के तहत कम्यूटेशन में सुधार के लिए बड़े मोटर्स पर किया जा सकता है। चूंकि यह फ़ील्ड तय है, इसे गति नियंत्रण के लिए समायोजित नहीं किया जा सकता है। क्षेत्र के घुमाव की बिजली खपत को खत्म करने के लिए पीएम फ़ील्ड (स्टेटर्स) लघु मोटर्स में सुविधाजनक हैं। अधिकांश बड़े डीसी मोटर “डायनेमो” प्रकार के होते हैं, जिनमें स्टेटर विंडिंग्स होते हैं। ऐतिहासिक रूप से, पीएम को उच्च प्रवाह बनाए रखने के लिए नहीं बनाया जा सका अगर उन्हें अलग किया गया था; क्षेत्र की घुमावदार प्रवाह की आवश्यक मात्रा प्राप्त करने के लिए अधिक व्यावहारिक थे। हालांकि, बड़े पीएम महंगा हैं, साथ ही साथ खतरनाक और इकट्ठा करना मुश्किल है; यह बड़ी मशीनों के लिए घाव के मैदानों का पक्ष लेता है।
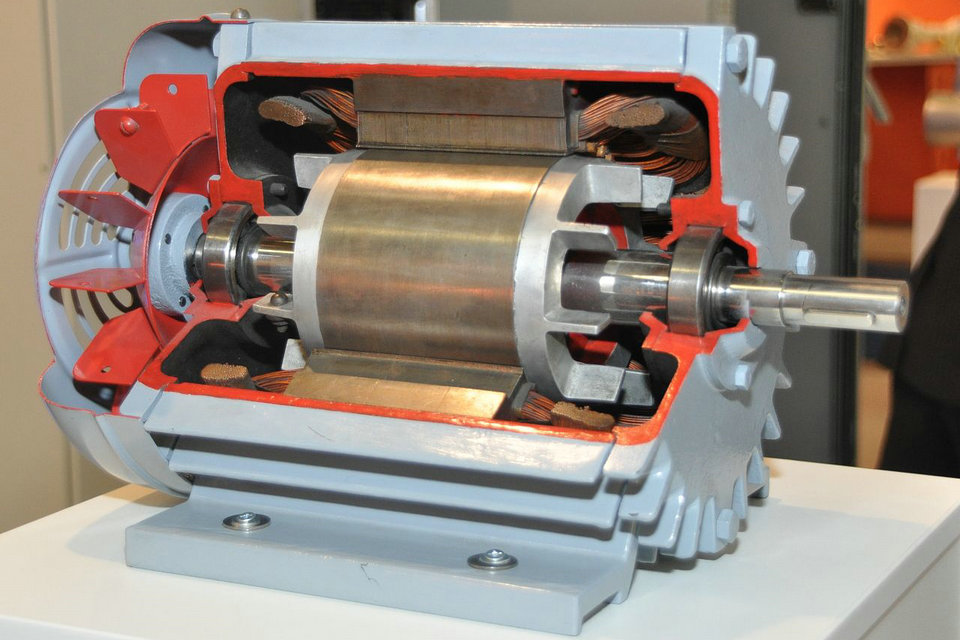
कुल वजन और आकार को कम करने के लिए, लघु पीएम मोटर नियोडियम या अन्य सामरिक तत्वों से बने उच्च ऊर्जा चुंबक का उपयोग कर सकते हैं; अधिकांश ऐसे नियोडियम-लौह-बोरॉन मिश्र धातु हैं। अपने उच्च प्रवाह घनत्व के साथ, उच्च ऊर्जा वाले पीएम के साथ इलेक्ट्रिक मशीन कम से कम प्रतिस्पर्धी एकल-सिंक्रोनस और प्रेरण इलेक्ट्रिक मशीनों के साथ प्रतिस्पर्धी हैं। लघु मोटर्स चित्रण में संरचना जैसा दिखता है, सिवाय इसके कि उनके पास कम से कम तीन रोटर ध्रुव हैं (रोटर की स्थिति के बावजूद, सुनिश्चित करने के लिए) और उनका बाहरी आवास एक स्टील ट्यूब है जो घुमावदार क्षेत्र चुंबकों के बाहरी हिस्सों को चुंबकीय रूप से जोड़ता है।
इलेक्ट्रॉनिक कम्यूटेटर (ईसी) मोटर
ब्रशलेस डीसी मोटर
ब्रश डीसी मोटर की कुछ समस्याओं को बीएलडीसी डिजाइन में समाप्त कर दिया गया है। इस मोटर में, यांत्रिक “घूर्णन स्विच” या कम्यूटेटर को रोटर की स्थिति में सिंक्रनाइज़ किए गए बाहरी इलेक्ट्रॉनिक स्विच द्वारा प्रतिस्थापित किया जाता है। बीएलडीसी मोटर आमतौर पर 85-90% कुशल या अधिक होते हैं। 96.5% तक की बीएलडीसी मोटर की क्षमता की सूचना मिली है, जबकि ब्रशगियर के साथ डीसी मोटर आमतौर पर 75-80% कुशल हैं।
बीएलडीसी मोटर की विशेषता ट्रैपेज़ॉयडल काउंटर-इलेक्ट्रोमोटिव बल (सीईएमएफ) वेवफॉर्म आंशिक रूप से स्टेटर विंडिंग्स से समान रूप से वितरित किया जाता है, और आंशिक रूप से रोटर के स्थायी चुंबकों के प्लेसमेंट से लिया जाता है। इलेक्ट्रॉनिक रूप से कम्यूटेटेड डीसी या डीसी मोटर के अंदर भी जाना जाता है, ट्राइपोज़ाइडल बीएलडीसी मोटरों की स्टेटर विंडिंग्स एकल चरण, दो चरण या तीन चरण के साथ हो सकती हैं और रोटर स्थिति सेंसिंग और कम लागत बंद करने के लिए उनके विंडिंग्स पर लगाए गए हॉल इफेक्ट सेंसर का उपयोग कर सकते हैं इलेक्ट्रॉनिक कम्यूटेटर के नियंत्रण नियंत्रण।
बीएलडीसी मोटर्स का आमतौर पर उपयोग किया जाता है जहां सटीक गति नियंत्रण आवश्यक होता है, जैसे कंप्यूटर डिस्क ड्राइव या वीडियो कैसेट रिकॉर्डर में, सीडी, सीडी-रोम (आदि) ड्राइव के भीतर स्पिंडल, और कार्यालय उत्पादों के भीतर तंत्र, जैसे कि प्रशंसकों, लेजर प्रिंटर और फ़ोटोकॉपियर। पारंपरिक मोटर्स पर उनके कई फायदे हैं:
छायांकित ध्रुव मोटर का उपयोग कर एसी प्रशंसकों की तुलना में, वे बहुत ही कुशल हैं, समकक्ष एसी मोटरों की तुलना में बहुत अधिक कूलर चल रहे हैं। यह ठंडा ऑपरेशन प्रशंसक के बियरिंग्स के बहुत बेहतर जीवन की ओर जाता है।
एक कम्यूटेटर पहनने के बिना, बीएलडीसी मोटर का जीवन ब्रश और कम्यूटेटर का उपयोग कर डीसी मोटर की तुलना में काफी लंबा हो सकता है। कम्यूटेशन भी बिजली और आरएफ शोर का एक बड़ा सौदा का कारण बनता है; एक कम्यूटेटर या ब्रश के बिना, एक बीएलडीसी मोटर का उपयोग इलेक्ट्रिक रूप से संवेदनशील उपकरणों जैसे ऑडियो उपकरण या कंप्यूटर में किया जा सकता है।
वही हॉल इफेक्ट सेंसर जो कम्यूटेशन प्रदान करते हैं, बंद-लूप नियंत्रण (सर्वो-नियंत्रित) अनुप्रयोगों के लिए सुविधाजनक टैकोमीटर सिग्नल भी प्रदान कर सकते हैं। प्रशंसकों में, टैकोमीटर सिग्नल का उपयोग “प्रशंसक ओके” सिग्नल प्राप्त करने के साथ ही चलने वाली गति प्रतिक्रिया प्रदान करने के लिए किया जा सकता है।
मोटर को आसानी से आंतरिक या बाहरी घड़ी में सिंक्रनाइज़ किया जा सकता है, जिससे सटीक गति नियंत्रण होता है।
बीएलडीसी मोटरों में ब्रश किए गए मोटरों के विपरीत स्पार्किंग का कोई मौका नहीं है, जिससे उन्हें अस्थिर रसायनों और ईंधन के साथ वातावरण के लिए बेहतर अनुकूल बना दिया जाता है। इसके अलावा, स्पार्किंग ओजोन उत्पन्न करती है, जो कमजोर हवादार इमारतों में जमा हो सकती है जो कि निवासियों के स्वास्थ्य को नुकसान पहुंचाती है।
बीएलडीसी मोटर्स आमतौर पर कंप्यूटर जैसे छोटे उपकरणों में उपयोग किए जाते हैं और आमतौर पर अवांछित गर्मी से छुटकारा पाने के लिए प्रशंसकों में उपयोग किए जाते हैं।
वे ध्वनिक रूप से बहुत शांत मोटर्स भी हैं, जो कंपनों से प्रभावित होने वाले उपकरणों में उपयोग किए जाने पर एक लाभ है।
आधुनिक बीएलडीसी मोटर्स एक वाट के एक अंश से कई किलोवाट तक बिजली में हैं। इलेक्ट्रिक वाहनों में लगभग 100 किलोवाट रेटिंग तक बड़े बीएलडीसी मोटर का उपयोग किया जाता है। उन्हें उच्च प्रदर्शन वाले इलेक्ट्रिक मॉडल विमान में भी महत्वपूर्ण उपयोग मिलता है।
स्विच अनिच्छा मोटर
एसआरएम में कोई ब्रश या स्थायी चुंबक नहीं है, और रोटर में कोई विद्युत धारा नहीं है। इसके बजाए, टोक़ स्टेटर पर ध्रुवों के साथ रोटर पर ध्रुवों के मामूली misalignment से आता है। रोटर स्टेटर के चुंबकीय क्षेत्र के साथ स्वयं को संरेखित करता है, जबकि स्टेटर फील्ड विंडिंग्स क्रमशः स्टेटर फ़ील्ड को घुमाने के लिए सक्रिय होते हैं।
क्षेत्र की विंडिंग्स द्वारा निर्मित चुंबकीय प्रवाह कम से कम चुंबकीय अनिच्छा के मार्ग का पालन करता है, जिसका अर्थ है कि प्रवाह रोटर के ध्रुवों के माध्यम से बह जाएगा जो स्टेटर के ऊर्जा वाले ध्रुवों के सबसे नज़दीक हैं, जिससे रोटर के उन ध्रुवों को चुंबक बनाते हैं और टोक़ बनाते हैं। जैसे ही रोटर बदल जाता है, रोटर मोड़ते हुए, अलग-अलग घुमावों को सक्रिय किया जाएगा।
कुछ उपकरणों और वाहनों में एसआरएम का उपयोग किया जाता है।
यूनिवर्सल एसी / डीसी मोटर
एक कम्यूटेटेड इलेक्ट्रिकली उत्तेजित श्रृंखला या समांतर घाव मोटर को सार्वभौमिक मोटर के रूप में जाना जाता है क्योंकि इसे एसी या डीसी पावर पर संचालित करने के लिए डिज़ाइन किया जा सकता है। एक सार्वभौमिक मोटर एसी पर अच्छी तरह से काम कर सकती है क्योंकि दोनों क्षेत्र और आर्मेचर कॉइल्स (और इसलिए परिणामी चुंबकीय क्षेत्र) में वर्तमान सिंक्रनाइज़ेशन में वैकल्पिक (विपरीत ध्रुवीयता) होगा, और इसलिए परिणामस्वरूप यांत्रिक बल घूर्णन की निरंतर दिशा में होगा ।
सामान्य पावर लाइन आवृत्तियों पर परिचालन, सार्वभौमिक मोटर अक्सर 1000 वाट से कम दूरी पर पाए जाते हैं। यूनिवर्सल मोटर्स ने इलेक्ट्रिक रेलवे में पारंपरिक रेलवे ट्रैक्शन मोटर का आधार भी बनाया। इस आवेदन में, डीसी पर चलाने के लिए मूल रूप से डिज़ाइन की गई मोटर को शक्ति देने के लिए एसी का उपयोग डीसी के लिए, उनके चुंबकीय घटकों, विशेष रूप से मोटर क्षेत्र ध्रुव-टुकड़ों की एडी वर्तमान हीटिंग के कारण दक्षता हानि का कारण बनता है, जो ठोस ( अन-टुकड़े टुकड़े) लौह और अब वे शायद ही कभी इस्तेमाल किया जाता है।
सार्वभौमिक मोटर का एक लाभ यह है कि एसी आपूर्ति का उपयोग मोटरों पर किया जा सकता है जिनके पास कुछ विशेषताओं डीसी मोटरों में अधिक आम हैं, विशेष रूप से उच्च प्रारंभिक टोक़ और उच्च गति वाली गति का उपयोग करने पर बहुत कॉम्पैक्ट डिज़ाइन। ऋणात्मक पहलू कम्यूटेटर के कारण रखरखाव और लघु जीवन की समस्या है। इस तरह के मोटर उपकरणों में उपयोग किए जाते हैं, जैसे कि खाद्य मिक्सर और पावर टूल्स, जिनका उपयोग केवल अंतःक्रियात्मक रूप से किया जाता है, और अक्सर उच्च प्रारंभिक टोक़ मांगें होती हैं। फील्ड कॉइल पर कई नलियां (अपर्याप्त) चरणबद्ध गति नियंत्रण प्रदान करती हैं। घरेलू मिश्रक जो कई गति का विज्ञापन करते हैं, अक्सर कई नल और एक डायोड के साथ एक फील्ड कॉइल को जोड़ते हैं जिसे मोटर के साथ श्रृंखला में डाला जा सकता है (मोटर को अर्ध-लहर सुधारित एसी पर चलने के कारण)। सार्वभौमिक मोटर भी इलेक्ट्रॉनिक गति नियंत्रण में खुद को उधार देते हैं और, घरेलू वाशिंग मशीन जैसे उपकरणों के लिए आदर्श विकल्प हैं। मोटर को आर्मेचर के संबंध में घुमाए गए क्षेत्र को स्विच करके ड्रम (दोनों आगे और विपरीत में) को उत्तेजित करने के लिए उपयोग किया जा सकता है।
जबकि एससीआईएम बिजली लाइन आवृत्ति द्वारा अनुमत की तुलना में शाफ्ट को तेजी से नहीं बदल सकता है, सार्वभौमिक मोटर बहुत अधिक गति से चल सकते हैं। इससे उन्हें ब्लेंडर, वैक्यूम क्लीनर और हेयर ड्रायर जैसे उपकरणों के लिए उपयोगी बना दिया जाता है जहां उच्च गति और हल्के वजन वांछनीय होते हैं। इन्हें आमतौर पर पोर्टेबल पावर टूल्स, जैसे ड्रिल, सैंडर्स, सर्कुलर और जिग आरे में भी उपयोग किया जाता है, जहां मोटर की विशेषताएं अच्छी तरह से काम करती हैं। कई वैक्यूम क्लीनर और खरपतवार ट्रिमर मोटर्स 10,000 आरपीएम से अधिक है, जबकि कई समान लघु grinders 30,000 आरपीएम से अधिक है।
बाहरी रूप से कम्यूटेटेड एसी मशीन
एसी प्रेरण और सिंक्रोनस मोटरों के डिजाइन को सिंगल-चरण या पॉलीफेस साइनसॉइडल या अर्ध-साइनसॉइडल वेवफॉर्म पावर पर ऑपरेशन के लिए ऑप्टिमाइज़ किया गया है जैसे कि एसी पावर ग्रिड से फिक्स्ड-स्पीड एप्लिकेशन के लिए या वीएफडी नियंत्रकों से वेरिएबल-स्पीड एप्लिकेशन के लिए आपूर्ति की जाती है। एक एसी मोटर में दो भाग होते हैं: एक स्थिर स्टेटर जिसमें घूर्णन वाले चुंबकीय क्षेत्र का उत्पादन करने के लिए एसी के साथ आपूर्ति की गई कॉइल होती है, और आउटपुट शाफ्ट से जुड़ी एक रोटर जिसे घूर्णन क्षेत्र द्वारा टोक़ दिया जाता है।
इंडक्शन मोटर
पिंजरे और घाव रोटर प्रेरण मोटर
एक प्रेरण मोटर एक एसिंक्रोनस एसी मोटर है जहां बिजली को विद्युत चुम्बकीय प्रेरण द्वारा रोटर में स्थानांतरित किया जाता है, ट्रांसफॉर्मर एक्शन की तरह। एक प्रेरण मोटर घूर्णन ट्रांसफार्मर जैसा दिखता है, क्योंकि स्टेटर (स्थिर भाग) अनिवार्य रूप से ट्रांसफॉर्मर का प्राथमिक पक्ष होता है और रोटर (घूर्णन भाग) माध्यमिक पक्ष होता है। पॉलीफेस प्रेरण मोटर्स का व्यापक रूप से उद्योग में उपयोग किया जाता है।
प्रेरण मोटर्स को आगे गिलहरी पिंजरे प्रेरण मोटर्स और घाव रोटर प्रेरण मोटर्स (डब्ल्यूआरआईएम) में विभाजित किया जा सकता है। एससीआईएम में ठोस सलाखों, आमतौर पर एल्यूमीनियम या तांबा से बने भारी घुमावदार होते हैं, जो रोटर के सिरों पर अंगूठियों से जुड़े होते हैं। जब कोई पूरी तरह से सलाखों और छल्ले को मानता है, तो वे जानवर के घूर्णन अभ्यास पिंजरे की तरह होते हैं, इसलिए नाम।
इस घुमाव में प्रेरित धाराएं रोटर चुंबकीय क्षेत्र प्रदान करती हैं। रोटर बार का आकार गति-टोक़ विशेषताओं को निर्धारित करता है। कम गति पर, गिलहरी पिंजरे में प्रेरित वर्तमान लगभग लाइन आवृत्ति पर होता है और रोटर पिंजरे के बाहरी हिस्सों में होता है। जैसे-जैसे मोटर बढ़ता है, पर्ची आवृत्ति कम हो जाती है, और अधिक वर्तमान घुमाव के इंटीरियर में होती है। पिंजरे के आंतरिक और बाहरी हिस्सों में घुमावदार हिस्सों के प्रतिरोध को बदलने के लिए सलाखों को आकार देकर प्रभावी रूप से रोटर सर्किट में एक परिवर्तनीय प्रतिरोध डाला जाता है। हालांकि, इस तरह के अधिकांश मोटरों में वर्दी बार होते हैं।
एक डब्लूआरआईएम में, रोटर घुमावदार इन्सुलेटेड तार के कई मोड़ों से बना होता है और मोटर शाफ्ट पर पर्ची के छल्ले से जुड़ा होता है। रोटर सर्किट में बाहरी अवरोधक या अन्य नियंत्रण उपकरणों को जोड़ा जा सकता है। प्रतिरोधी मोटर गति के नियंत्रण की अनुमति देते हैं, हालांकि बाहरी प्रतिरोध में महत्वपूर्ण शक्ति समाप्त हो जाती है। एक कनवर्टर रोटर सर्किट से खिलाया जा सकता है और पर्ची आवृत्ति शक्ति वापस कर सकता है जो अन्यथा एक इन्वर्टर या अलग मोटर जनरेटर के माध्यम से बिजली प्रणाली में बर्बाद हो जाएगा।
डब्लूआरआईएम मुख्य रूप से एक उच्च जड़ता भार या एक लोड शुरू करने के लिए प्रयोग किया जाता है जिसके लिए पूर्ण गति सीमा में बहुत अधिक प्रारंभिक टोक़ की आवश्यकता होती है। द्वितीयक प्रतिरोध या पर्ची रिंग स्टार्टर में इस्तेमाल प्रतिरोधकों का सही ढंग से चयन करके, मोटर शून्य गति से पूर्ण गति तक अपेक्षाकृत कम आपूर्ति वर्तमान पर अधिकतम टोक़ का उत्पादन करने में सक्षम है। इस प्रकार की मोटर भी नियंत्रित गति प्रदान करता है।
मोटर की गति को बदला जा सकता है क्योंकि मोटर के टोक़ वक्र को प्रभावी ढंग से रोटर सर्किट से जुड़े प्रतिरोध की मात्रा से संशोधित किया जाता है। प्रतिरोध के मूल्य में वृद्धि से अधिकतम टोक़ की गति बढ़ जाएगी। यदि रोटर से जुड़ा प्रतिरोध उस बिंदु से आगे बढ़ता है जहां अधिकतम टोक़ शून्य गति पर होता है, तो टोक़ और भी कम हो जाएगा।
जब लोड के साथ उपयोग किया जाता है जिसमें टोक़ वक्र होता है जो गति के साथ बढ़ता है, मोटर उस गति पर काम करेगा जहां मोटर द्वारा विकसित टोक़ भार टोक़ के बराबर होता है। लोड को कम करने से मोटर तेज हो जाएगी, और भार बढ़ने से मोटर धीमी हो जाएगी जब तक भार और मोटर टोक़ बराबर न हों। इस तरह से संचालित, पर्ची नुकसान द्वितीयक प्रतिरोधकों में विलुप्त हो जाते हैं और यह बहुत महत्वपूर्ण हो सकता है। गति विनियमन और शुद्ध दक्षता भी बहुत खराब है।
टोक़ मोटर
एक टोक़ मोटर इलेक्ट्रिक मोटर का एक विशेष रूप है जो रुकने के दौरान अनिश्चित काल तक काम कर सकती है, यानी रोटर को क्षति से अवरुद्ध होने के कारण अवरुद्ध कर दिया जाता है। ऑपरेशन के इस तरीके में, मोटर लोड (इसलिए नाम) के लिए एक स्थिर टोक़ लागू करेगा।
एक टोक़ मोटर का एक आम अनुप्रयोग आपूर्ति होगी- और एक टेप ड्राइव में टेक-अप रील मोटर्स। इस आवेदन में, कम वोल्टेज से प्रेरित, इन मोटरों की विशेषताओं टेप पर अपेक्षाकृत स्थिर प्रकाश तनाव लागू करने की अनुमति देती है चाहे कैपेस्तान टेप हेड के पीछे टेप खिला रहा हो या नहीं। उच्च वोल्टेज से संचालित, (और इसलिए उच्च टोक़ वितरित करना), टोक़ मोटर भी तेजी से आगे बढ़ सकते हैं और बिना किसी अतिरिक्त यांत्रिकी जैसे गियर या क्लच की आवश्यकता के बिना रिवाइंड ऑपरेशन प्राप्त कर सकते हैं। कंप्यूटर गेमिंग दुनिया में, टोक़ मोटर्स का उपयोग बल प्रतिक्रिया स्टीयरिंग व्हील में किया जाता है।
एक अन्य आम अनुप्रयोग इलेक्ट्रॉनिक गवर्नर के साथ एक आंतरिक दहन इंजन के थ्रॉटल का नियंत्रण है। इस उपयोग में, मोटर गवर्नर के उत्पादन के अनुसार थ्रॉटल को स्थानांतरित करने के लिए वापसी वसंत के खिलाफ काम करता है। बाद में इग्निशन सिस्टम से या चुंबकीय पिकअप से विद्युत दालों की गणना करके इंजन की गति पर नज़र रखता है और गति के आधार पर, मोटर पर लागू वर्तमान की मात्रा में छोटे समायोजन करता है। यदि इंजन वांछित गति के सापेक्ष धीमा होना शुरू कर देता है, तो वर्तमान में वृद्धि होगी, मोटर अधिक टोक़ विकसित करेगी, वापसी वसंत के खिलाफ खींच रही है और थ्रॉटल खोल रही है। इंजन को बहुत तेजी से चलाना चाहिए, गवर्नर मोटर पर लागू होने वाले वर्तमान को कम कर देगा, जिससे वसंत वसंत वापस खींचने और थ्रॉटल को बंद कर देगा।
तुल्यकालिक मोटर
एक सिंक्रोनस इलेक्ट्रिक मोटर एक एसी मोटर है जो एक रोटर कताई द्वारा प्रतिष्ठित होती है जिसमें एसी के समान दर पर चुंबक पास करने वाले कॉइल्स होते हैं और जिसके परिणामस्वरूप चुंबकीय क्षेत्र होता है। यह कहने का एक और तरीका यह है कि इसमें सामान्य परिचालन स्थितियों के तहत शून्य पर्ची है। एक प्रेरण मोटर के साथ इसकी तुलना करें, जो टोक़ का उत्पादन करने के लिए पर्ची चाहिए। एक प्रकार की सिंक्रोनस मोटर एक प्रेरण मोटर की तरह है, सिवाय इसके कि रोटर डीसी क्षेत्र से उत्साहित है। पर्ची के छल्ले और ब्रश का उपयोग रोटर को चालू करने के लिए किया जाता है। रोटर ध्रुव एक दूसरे से जुड़ते हैं और एक ही गति से आगे बढ़ते हैं इसलिए नाम सिंक्रोनस मोटर। कम लोड टोक़ के लिए एक और प्रकार, अलग-अलग ध्रुवों को बनाने के लिए एक पारंपरिक गिलहरी-पिंजरे रोटर पर जमीन पर फ्लैट होता है। फिर भी एक और, जैसे कि हैम्मंड द्वारा अपने द्वितीय विश्व युद्ध के घड़ियों के लिए बनाया गया था, और पुराने हैमंड अंगों में, कोई रोटर घुमावदार और असतत ध्रुव नहीं है। यह आत्म-शुरू नहीं है। घड़ी को पीछे की ओर एक छोटे से घुंडी से शुरू होने वाले मैनुअल की आवश्यकता होती है, जबकि पुराने हैमोंड अंगों में वसंत-भारित मैन्युअल रूप से संचालित स्विच से जुड़ा एक सहायक प्रारंभिक मोटर था।
अंत में, हिस्टैरेसीस सिंक्रोनस मोटर्स आमतौर पर एक चरण के लिए एक चरण-स्थानांतरण कैपेसिटर के साथ दो चरण मोटर्स (अनिवार्य रूप से) होते हैं। वे प्रेरण मोटर्स की तरह शुरू होते हैं, लेकिन जब पर्ची दर पर्याप्त रूप से कम हो जाती है, तो रोटर (एक चिकनी सिलेंडर) अस्थायी रूप से चुंबकीय हो जाता है। इसके वितरित ध्रुव इसे स्थायी चुंबक सिंक्रोनस मोटर (पीएमएसएम) की तरह कार्य करते हैं। रोटर सामग्री, एक सामान्य नाखून की तरह, चुंबकीय रहती है, लेकिन इसे कम कठिनाई के साथ भी डिमैग्नेटाइज किया जा सकता है। एक बार दौड़ने के बाद, रोटर ध्रुवों में जगह रहती है; वे बहाव नहीं करते हैं।
लो-पावर सिंक्रोनस टाइमिंग मोटर्स (जैसे पारंपरिक इलेक्ट्रिक घड़ियों के लिए) में बहु-ध्रुव स्थायी चुंबक बाहरी कप रोटर्स हो सकते हैं, और प्रारंभिक टोक़ प्रदान करने के लिए छायांकन कॉइल्स का उपयोग कर सकते हैं। दूरसंचार घड़ी मोटरों ने टोक़ शुरू करने के लिए ध्रुवों को छायांकित किया है, और एक दो-स्पीड रिंग रोटर जो एक अलग दो-ध्रुव रोटर की तरह प्रदर्शन करता है।
डबली-फेड इलेक्ट्रिक मशीन
निस्संदेह खिलाए गए इलेक्ट्रिक मोटरों में दो स्वतंत्र मल्टीफेस घुमावदार सेट होते हैं, जो ऊर्जा रूपांतरण प्रक्रिया में सक्रिय (यानी काम कर रहे) शक्ति का योगदान करते हैं, कम से कम एक घुमावदार सेट वेरिएबल स्पीड ऑपरेशन के लिए इलेक्ट्रॉनिक रूप से नियंत्रित होते हैं। दो स्वतंत्र मल्टीफेस घुमावदार सेट (यानी, दोहरी आर्मेचर) अधिकतम एक ही पैकेज में टोपोलॉजी डुप्लिकेशन के बिना प्रदान किए जाते हैं। डबली-फेड इलेक्ट्रिक मोटर एक प्रभावी निरंतर टोक़ गति सीमा वाली मशीनें हैं जो उत्तेजना की दी गई आवृत्ति के लिए दो बार सिंक्रोनस गति होती हैं। यह अकेले टॉर्क स्पीड रेंज से दोगुना-फेड इलेक्ट्रिक मशीनों के रूप में दोगुना होता है, जिसमें केवल एक सक्रिय घुमावदार सेट होता है।
एक दोगुनी-फेड मोटर एक छोटे से इलेक्ट्रॉनिक कनवर्टर की अनुमति देता है लेकिन रोटर घुमावदार और पर्ची के छल्ले की लागत बिजली इलेक्ट्रॉनिक्स घटकों में बचत को ऑफ़सेट कर सकती है। तुल्यकालिक गति सीमा अनुप्रयोगों के पास गति को नियंत्रित करने में कठिनाइयों।