Ponto de momento zero é um conceito relacionado com dinâmica e controle de locomoção de pernas, por exemplo, para robôs humanóides. Especifica o ponto em relação ao qual a força de reação dinâmica no contato do pé com o solo não produz nenhum momento na direção horizontal, isto é, o ponto em que o total de forças de inércia horizontal e gravidade é igual a 0 (zero). O conceito assume que a área de contato é plana e tem atrito suficientemente alto para impedir que os pés deslizem.
Introdução
Este conceito foi introduzido em janeiro de 1968 por Miomir Vukobratović no Terceiro Congresso da União de Teoria e Mecânica Aplicada em Moscou. Nos seguintes trabalhos e documentos que foram produzidos entre 1970 e 1972, seria então chamado ponto de momento zero e seria espalhado pelo mundo.
O ponto de momento zero é um conceito muito importante no planejamento de movimento para robôs bípedes. Como eles têm apenas dois pontos de contato com o chão e devem andar, “correr” ou “pular” (no contexto de movimento), seu movimento deve ser planejado com relação à estabilidade dinâmica de todo o corpo. Esta não é uma tarefa fácil, especialmente porque a parte superior do corpo do robô (torso) tem maior massa e inércia do que as pernas que supostamente suportam e movimentam o robô. Isso pode ser comparado ao problema de equilibrar um pêndulo invertido.
A trajetória de um robô ambulante é planejada usando a equação momento angular para garantir que as trajetórias de articulações geradas garantam a estabilidade postural dinâmica do robô, que geralmente é quantificada pela distância do ponto de momento zero nos limites de uma região de estabilidade predefinida. A posição do ponto de momento zero é afetada pela massa e inércia referidas do torso do robô, uma vez que seu movimento geralmente requer torques de tornozelo grandes para manter uma estabilidade postural dinâmica satisfatória.
Uma abordagem para resolver esse problema consiste em usar pequenos movimentos do tronco para estabilizar a postura do robô. No entanto, alguns novos métodos de planejamento estão sendo desenvolvidos para definir as trajetórias dos elos das pernas de tal maneira que o tronco do robô é naturalmente guiado para reduzir o torque do tornozelo necessário para compensar seu movimento.Se o planejamento da trajetória para as ligações das pernas for bem sucedido, então o ponto de momento zero não se moverá para fora da região de estabilidade predefinida e o movimento do robô se tornará mais suave, imitando uma trajetória natural.
Computação ZMP
A força resultante das forças de inércia e gravidade atuando sobre um robô bípede é expressa pela fórmula:

Onde é a massa total do robô, é a aceleração da gravidade é o centro de massa e é a aceleração do centro de massa.
 é a massa total do robô,
é a massa total do robô,  é a aceleração da gravidade
é a aceleração da gravidade  é o centro de massa e
é o centro de massa e  é a aceleração do centro de massa.
é a aceleração do centro de massa.O momento em qualquer ponto pode ser definido como:
 pode ser definido como:
pode ser definido como:
Onde é a taxa de momento angular no centro de massa.
As equações de Newton – Euler do movimento global do robô bípede podem ser escritas como:
 é a taxa de momento angular no centro de massa.
é a taxa de momento angular no centro de massa.

Onde é o resultante das forças de contato em X e é o momento relacionado com forças de contato sobre qualquer ponto X.
As equações de Newton – Euler podem ser reescritas como:
 é o resultante das forças de contato em X e
é o resultante das forças de contato em X e  é o momento relacionado com forças de contato sobre qualquer ponto X.
é o momento relacionado com forças de contato sobre qualquer ponto X.

então é mais fácil ver que temos:


Essas equações mostram que o robô bípede é balanceado dinamicamente se as forças de contato e as forças de inércia e gravidade forem estritamente opostas.
Se um eixo é definido, onde o momento é paralelo ao vetor normal da superfície sobre cada ponto do eixo, então o Ponto de Momento Zero (ZMP) necessariamente pertence a este eixo, uma vez que é por definição direcionado ao longo do vetor . O ZMP será então a interseção entre o eixo e a superfície do solo tal que:
 é definido, onde o momento é paralelo ao vetor normal
é definido, onde o momento é paralelo ao vetor normal  da superfície sobre cada ponto do eixo, então o Ponto de Momento Zero (ZMP) necessariamente pertence a este eixo, uma vez que é por definição direcionado ao longo do vetor
da superfície sobre cada ponto do eixo, então o Ponto de Momento Zero (ZMP) necessariamente pertence a este eixo, uma vez que é por definição direcionado ao longo do vetor
com


Onde representa o ZMP.
 representa o ZMP.
representa o ZMP.Por causa da oposição entre as forças de gravidade e inércia e as forças de contato mencionadas anteriormente, o {\ displaystyle Z} ponto (ZMP) pode ser definido por:

Onde é um ponto no plano de contato, por exemplo, a projeção normal do centro de massa.
 é um ponto no plano de contato, por exemplo, a projeção normal do centro de massa.
é um ponto no plano de contato, por exemplo, a projeção normal do centro de massa.História do conceito
A noção de ZMP foi introduzida pela primeira vez por Miomir Vukobratović no Terceiro Congresso da União para a Mecânica Teórica e Aplicada, realizada em Moscou em janeiro de 1968. O termo “momento zero” apareceu em trabalhos publicados. nos anos seguintes.
O interesse na ZMP decolou na década de 1990, quando roboticistas a aplicaram com sucesso para controlar as leis da marcha bípede. O modelo fundamental que permitiu estes desenvolvimentos é o do pêndulo invertido: a parte superior do corpo tem uma massa maior que as pernas, a caminhada consiste na primeira aproximação ao movimento de um pêndulo invertido, isto é, uma massa conectada a uma base móvel uma vareta de massa zero (o modelo “CART”). A massa em questão representa o centro de gravidade do robô, a haste sua perna de apoio e o ponto de base móvel não é outro senão o ZMP. Este modelo foi aplicado com sucesso aos robôs HRP-2 1 e HRP-4C, onde o centro de gravidade permanece a uma altura constante.
Link com o centro de pressão
O centro de pressão é uma característica de ponto dinâmico de um contato. Ao contrário do ZMP, que é definido de acordo com todas as acelerações do robô, o COP é uma quantidade local definida a partir das forças exercidas na superfície de um contato. No entanto, quando há apenas um contato, ou o robô está andando no solo horizontal, o COP e o ZMP coincidem.
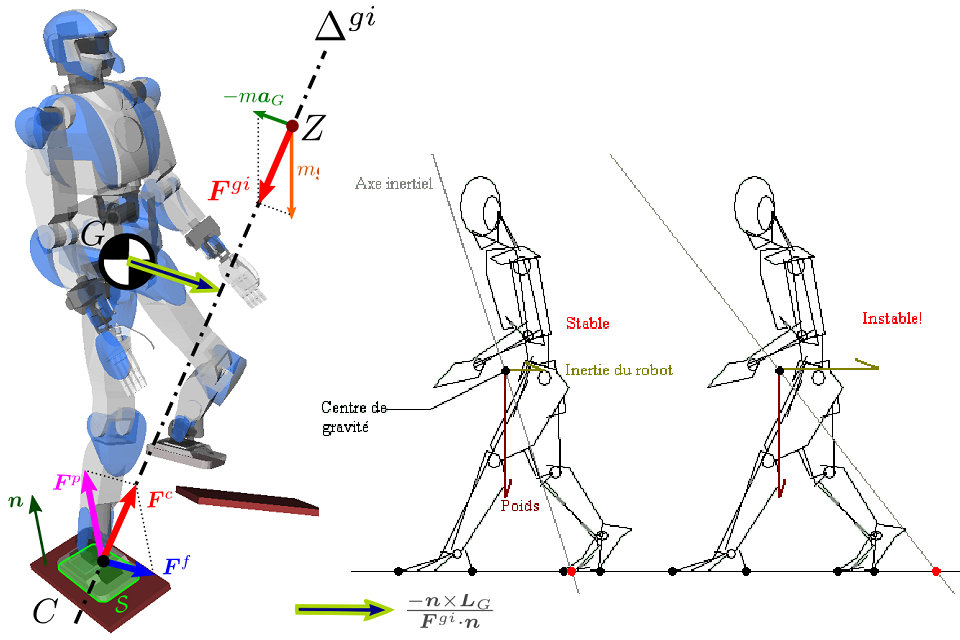
A figura à direita representa o centro de gravidade , o centro de pressão do contato do pé direito bem como um ZMP . Pontos estão sempre alinhados no eixo inercial . Este último não passa necessariamente pelo centro de gravidade, a menos que o robô mantenha seu momento angular ( ), que é uma hipótese comum de trabalho na locomoção.


Caso especial de chão plano
Desde que o contato com a superfície não se rompa, o centro de pressão reside necessariamente dentro da superfície de contato entre o robô e o ambiente. Quando os dois pés do robô estão em contato com a mesma superfície (o solo), essa superfície de levitação é o casco convexo de todos os pontos de apoio, isto é, o conjunto de pontos situados “entre os dois pés”. Esta superfície permite definir as pressões e o atrito e, portanto, um centro de pressão associado (consulte o Centro de Pressão para obter mais detalhes). COP e ZMP coincidentes, obtemos o critério:

Critério de não inclinação: Durante a operação sem inclinação, o ZMP está localizado dentro da superfície de elevação, definida como o casco convexo dos fulcros.
Este critério é mais freqüentemente usado para andar em robôs humanóides em terreno plano.
Aplicações
Ponto de momento zero foi proposto como uma métrica que pode ser usada para avaliar a estabilidade contra o tombamento de robôs como o iRobot PackBot ao navegar em rampas e obstáculos.