
إن مناور الهاتف المحمول هو مصطلح واسع الانتشار في الوقت الحاضر للإشارة إلى أنظمة الروبوت التي تم بناؤها من ذراع مناول آلية تم تركيبها على منصة متنقلة. وتجمع هذه الأنظمة بين مزايا المنصات المتنقلة وأذرع التشغيل الآلية وتقلل من عيوبها. على سبيل المثال ، فإن المنصة المتنقلة تمد مساحة العمل الخاصة بالذراع ، في حين أن الذراع يوفر العديد من الوظائف التشغيلية.
وصف
يوفر نظام التلاعب المحمول ميزة مزدوجة للتنقل توفرها منصة متنقلة وبراعة يقدمها المناور. يوفر النظام الأساسي للجوّال مساحة عمل غير محدودة للناقل. توفر درجات إضافية من الحرية للمنصة المتنقلة أيضا للمستخدم مع المزيد من الخيارات. ومع ذلك ، فإن تشغيل مثل هذا النظام يمثل تحديًا بسبب العديد من درجات الحرية والبيئة غير المنظمة التي يؤديها.
تكوين النظام العام:
منصة متنقلة
مناور روبوت
رؤية
الأدوات
التحفيز
في الوقت الحالي ، يعد التلاعب المحمول موضوعًا رئيسيًا للتركيز في بيئات التطوير والبحث ، ويتم استخدام المتلاعبين المتنقلين ، سواء المستقلين أو التليوبيليين ، في العديد من المجالات ، مثل استكشاف الفضاء ، والعمليات العسكرية ، والرعاية المنزلية والرعاية الصحية. ومع ذلك ، في إطار المجال الصناعي ، كان تنفيذ المتلاعبين المتنقلين محدودًا ، على الرغم من وجود احتياجات أتمتة ذكية ومرنة. وبالإضافة إلى ذلك ، فإن الكيانات التكنولوجية الضرورية (المنصات المتنقلة ، المتلاعبين بالروبوت ، الرؤية والأدوات) هي إلى حد كبير مكونات جاهزة متاحة.
والسبب في ذلك هو أن الصناعات التحويلية تعمل تقليديا ، وبالتالي ، لديها تردد في تحمل المخاطر من خلال تنفيذ التكنولوجيات الجديدة. أيضا ، في مجال التلاعب الصناعي المتنقل كان مركز الاهتمام على الاستفادة المثلى من التقنيات الفردية ، وخاصة المتلاعبين الروبوت والأدوات ، في حين تم إهمال التكامل والاستخدام والتطبيق. وهذا يعني أنه تم الإبلاغ عن عدد قليل من تطبيقات الروبوتات المتنقلة ، في بيئات الإنتاج – على سبيل المثال و.
المكونات
منصة روبوت المحمول
كقاعدة متنقلة ، تستخدم كل من أنظمة النقل الكلاسيكية بدون سائق والروبوتات المتحركة. إن استخدام روبوت متنقل له ميزة أنه يمكنه التنقل بحرية وبشكل مستقل في الغرفة وبالتالي فإن المناور في حالة حدوث مشاكل (الهدف بعيدًا عن متناول اليد ، والتلاعب بالموضع الحالي من الحركة الحركية غير ممكن ، والتغير في موضع الأجزاء يمكن أن يتم دعمها بشكل مباشر بدلاً من نقلها إلى موضع ثابت فقط. تعد القدرة على المناورة في المنصة مهمة جدًا. على النقيض من FTS ، يمكن للروبوت المحمول أيضًا أن يتعامل مع المواقف التي يتم تعيينها ديناميكيًا في أي وقت. ومع ذلك ، فإن الحركيات التفاضلية الكلاسيكية ، خاصة في المناطق المجاورة مباشرة لمحطات العمل ، تصل إلى حدودها ، ولا يمكن تحريك الروبوت إلا بمناورة معقدة أو أكثر. الاستخدام ، ولهذا السبب ، تزداد شعبية محركات الأقراص متعددة الاتجاهات.
خيارات التخزين
إذا كان مناور الهاتف المحمول هو أيضًا لنقل الأشياء بكفاءة ، فيجب أن يكون مجهزًا بمرافق تخزين مناسبة. ويمكن استخدام هذه ، مع التصميم المناسب ، أيضا للسماح بتغيير المقبض ، دون استخدام ذراع ثانية. (على سبيل المثال ، يجب إيقاف زجاجة بيرة تم سحبها من الصندوق عند الإغلاق واستحوذت على الجسم قبل أن يتم سكبها). خيارات التخزين الكبيرة تجعل عمل الروبوت أكثر كفاءة من حيث المبدأ ، ولكن أيضًا يجعل من الصعب التنقل في السيارة.
ذراع مناور
هذا يمكن أن يكون روبوت صناعي و ذراع آلي متطور بشكل خاص. مع توافر مجموعة من الأسلحة الآلية الصغيرة والخفيفة الوزن والمتاحة تجاريا ، انخفض استخدام الأسلحة الذاتية النمو بشكل كبير. (انظر أيضًا: ذراع مناول مرن)
القابض
يجب اختيار المستجيب النهائي لتتناسب مع العنصر المراد التلاعب به. يتوفر القابضون المجسمون بأصابع متحركة متعددة بشكل متزايد ويستخدمون بشكل أساسي في البحث.
معالجة الصورة
عندما يتعامل الروبوت مع أجزاء في بيئة العمل ، يكون نظام معالجة الصور مطلوبًا دائمًا تقريبًا. إذا تم تنفيذ حركات الذراع الثابتة فقط ، فيجب على الأقل تحديد الإزاحة بين الوضع الحالي وموقف المنصة المستخدم أثناء التدريب وأخذها في الاعتبار. من أجل تولي مهام العاملين البشريين ، يجب أن يتعامل الروبوت مع أجزاء أكثر أو أقل اضطراباً (تعرف أيضًا باسم مقبض في الصندوق) أو مواقع تخزين متغيرة.
السيطرة المنسقة
وقد تم استخدام الضوابط الفردية للروبوتات المتحركة والأسلحة الآلية منذ عقود وهي متطورة بشكل جيد. ومع ذلك ، عند الجمع بين النظامين ، يظهر عدد كبير جدًا من حالات الخطأ والمشاكل المحتملة مما يجعل من الضروري إضافة عنصر تحكم إضافي للتنسيق. قبل كل شيء ، يجب أن يجد هذا الحلول بشكل مستقل إذا كان التلاعب المرتب لا يمكن تنفيذه ، ولكن سيكون من الممكن القيام بذلك من وضعية أخرى. من المفيد التحكم في النظام بأكمله كسلسلة kinematic مغلقة ، والتي يصعب تنفيذها للغاية في التنفيذ بسبب التكرار العالي.
نظام الأمن
من حيث المبدأ ، من الممكن استخدام أجهزة السلامة التي تستخدم للأذرع الثابتة الثابتة أو المركبات المستقلة العادية ، وكذلك لأجهزة المناولة النقالة. ومع ذلك ، عندما يتقاسم أحد المناولين المتنقلين منطقة العمل مع أشخاص أو على الأقل مركبات أخرى ، يخضع النظام الأمني لمتطلبات جديدة للغاية ومتطلبة للغاية ، حيث تنشأ العديد من الحالات الخطيرة المحتملة.
المميزات والعيوب
عند الجمع بين المنصات المتنقلة الآلية والأسلحة الآلية ، تكون المزايا والعيوب الناتجة أكبر من مجموع الأجزاء الخاصة بها.
مزايا:
نطاق الوظائف والتطبيقات الممكنة هي قفزات و حدود.
يصبح نظام الروبوت بالكامل أكثر استقلالية بشكل كبير عن الأنظمة الداعمة (محطات التحميل والتفريغ ، معدات مناولة المواد ، معدات النقل ، …) ويمكن بالتالي ، من الناحية النظرية على الأقل ، أن يصبح أرخص.
كما أن المتلاعبين المتنقلين يجعلون من الممكن أتمتة أنشطة جسدية أكثر تعقيدًا لم يكن في السابق من الممكن أن يقوم بها إلا البشر ، وكثيراً ما تسبب مشاكل صحية بسبب التمارين الرياضية.
يمكن للنظام الكلي أن يتفاعل بشكل أكثر مرونة مع عدم الدقة والانحرافات ، على سبيل المثال من خلال تتبع قاعدة الذراع عندما لا يمكن الوصول إلى الكائن مباشرة.
العيب:
بسبب متطلبات كل من المكونات ، غالباً ما تتداخل مع بعضها البعض:
يحتاج الذراع إلى قاعدة ثابتة كبيرة للعمل بكفاءة ، ولكن يجب أن تكون المنصة صغيرة وخفيفة للتنقل بكفاءة.
وكلما كانت أقصر أوقات دورة النظام الأساسي ، زادت سرعة الوصول إلى محرك الأقراص والمواضع المستهدفة الأقل دقة. غير معروف أكثر دقة ولكن موقف بداية الذراع ، وكلما يرجع ذلك إلى التصحيحات المطلوبة دورة أوقاتها.
لزيادة عمر منصة تعمل بالبطارية ، يجب تقليل إجمالي الوزن واستهلاك الطاقة. ومع ذلك ، فإن ذراع الروبوت يعمل بكفاءة أكبر ، والمزيد من الوظائف (وبالتالي عادة مكونات إضافية) يجمعها.
وحقيقة أن بيئة العمل في الذراع تتغير باستمرار ، فإن العديد من الهياكل المساعدة المستخدمة سابقًا (قطع الغيار ذات الصلة بالوضع النهائي المحدد للذراع ، ومواقع النقل غير القابلة للتغيير للمكونات ، والإضاءة المحددة ، وما إلى ذلك) لم تعد أكثر صعوبة أو صعوبة استعمال.
بالإضافة إلى ذلك ، فإن العديد من المتلاعبين المتنقلين لا يتمتعون بالمرونة الكافية لاستخدامها في المهام سريعة التغير. هذا هو واحد من أكبر الموانع للاستخدام واسع النطاق حتى في الشركات الصغيرة والمتوسطة الحجم.
عند التفاعل مع الناس ، تنشأ مواقف خطرة جديدة تمامًا ، مما يضع متطلبات متزايدة على تكنولوجيا السلامة ويحد بشدة من نسبة الحلول القابلة للتنفيذ مقارنةً بالحلول المجدية تقنياً.
لا توجد حاليًا معايير أو إرشادات أو مقترحات تصميم متوافقة تمامًا مع هذا النوع من الروبوت ، مما يجعل من الصعب التنبؤ بالعواقب القانونية المحتملة للإصابة أو الضرر.
مع زيادة عدد الخيارات أيضا بشكل غير متناسب أعلى ترتبط متطلبات السيطرة على النظام العام ، وخاصة فيما يتعلق بمعالجة الأخطاء المستقلة. هذا يزيد أيضًا من خطر تعطل الماكينة.
مجالات التطبيق
المجالات المحتملة لتطبيق المتلاعبين المتنقلين متنوعة وغير متوقعة في الوقت الحالي. بعض التطبيقات المعروفة هي:
خدمات التوصيل للمنازل
يقودها تطبيق واسع النطاق من البيرة getten تستخدم أساسا في مشاريع البحوث في مجال الروبوتات الخدمة ويفضل المهام لأغراض العرض ، والتي تحدث أيضا في الأسر الخاصة ، وبالتالي فعالة في وسائل الإعلام. التحدي العلمي في هذه المهام هو عادة أعلى بكثير من الفوائد الاقتصادية المتوقعة.
رعاية
مع زيادة نسبة كبار السن والأشخاص المعالين ، وكذلك الحاجة إلى الممرضات. ومن المتوقع بحلول عام 2050 أن تتضاعف نسبة الأشخاص المحتاجين للرعاية مقارنة بعدد الأشخاص العاملين. لذلك ، في مشاريع بحثية مختلفة ، وخاصة في اليابان ، عملت بجد لرعاية الروبوتات.
اختيار
ويجري حاليا تنفيذ مشاريع التطوير لاستخدام المتلاعبين المحمول في انتقاء المكونات الثقيلة أو غير عملية. هناك أخطاء ، والتي يمكن أن تسبب ارتفاع تكاليف المتابعة ، يتم منعها. بالإضافة إلى ذلك ، يتم تحرير العاملين البشريين من المهام غير الصحية طويلة الأجل ، والتي تصبح أكثر ملاءمة كلما زاد متوسط عمر القوة العاملة.
الجدول الزمني
| عام | اسم الروبوت | شركة / معهد البحوث |
|---|---|---|
| 1996 | Hilare 2bis | LAAS-CNRS ، فرنسا |
| 2000 | جاومي | مختبر الذكاء الآلي ، جامعة جاومي الأول ، إسبانيا |
| 2004 | فاوستو | جامعة فيرونا ، إيطاليا |
| 2006 | Neobotix MM-500 | Neobotix GmbH ، ألمانيا |
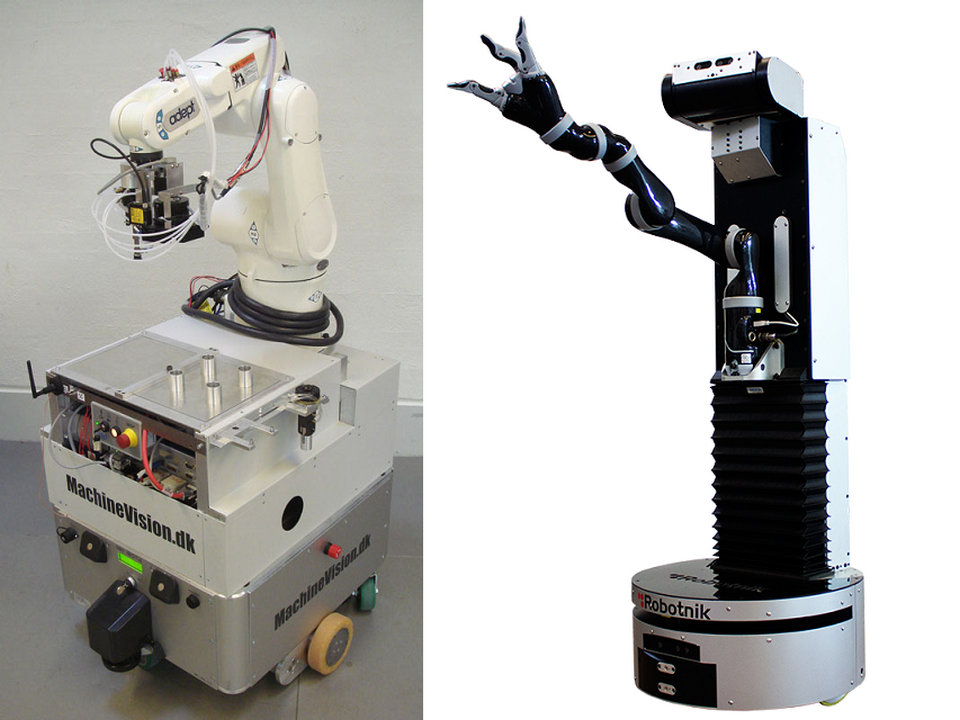
| 2009 | المساعد الصغير | قسم الإنتاج ، جامعة ألبورغ ، الدنمارك |
| 2012 | G-WAM | Robotnik Automation & Barrett Technologies، Spain & United States |
| 2013 | UBR-1 | الروبوتات غير المحدودة ، الولايات المتحدة |
| 2013 | X-WAM | Robotnik Automation & Barrett Technologies، Spain & United States |
| 2015 | كارلوس | أيمن ، إسبانيا |
| 2015 | RB-1 | Robotnik Automation & Kinova Robotics، Spain & Canada |
مثال رائع من الفن
أحد الأمثلة الحديثة هو المناولة النقالة “ليتل هيلبر” من قسم الإنتاج في جامعة آلبورغ.