Мобильный манипулятор

Мобильный манипулятор в настоящее время является широко распространенным термином для обозначения систем роботов, построенных на роботизированной манипуляторной манипуляции, установленной на мобильной платформе. Такие системы сочетают преимущества мобильных платформ и роботизированных манипуляторов и уменьшают их недостатки. Например, мобильная платформа расширяет рабочее пространство руки, тогда как рычаг предлагает несколько функциональных возможностей.
Описание
Система мобильной манипуляции предлагает двойное преимущество мобильности, предлагаемое мобильной платформой и ловкостью, предлагаемой манипулятором.Мобильная платформа предлагает неограниченное рабочее пространство манипулятора.Дополнительные степени свободы мобильной платформы также предоставляют пользователю больше возможностей. Однако работа такой системы сложна из-за многих степеней свободы и неструктурированной среды, в которой она работает.
Общий состав системы:
Мобильная платформа
Робот-манипулятор
видение
механическая обработка
мотивация
В настоящий момент мобильная манипуляция является предметом серьезного внимания в области разработки и исследований, а мобильные манипуляторы, автономные или дистанционные, используются во многих областях, таких как космические исследования, военные операции, уход на дому и медицинское обслуживание. Однако в промышленной области внедрение мобильных манипуляторов было ограничено, хотя потребности в интеллектуальной и гибкой автоматизации присутствуют. Кроме того, необходимые технологические объекты (мобильные платформы, манипуляторы роботов, зрение и инструменты) в значительной степени доступны готовым компонентам.
Причиной этого является то, что производственные отрасли действуют традиционно и, следовательно, испытывают нежелание принимать риски за счет внедрения новых технологий.Кроме того, в области промышленных мобильных манипуляций основное внимание уделялось оптимизации отдельных технологий, особенно роботизированных манипуляторов и инструментов, в то время как интеграция, использование и применение были пренебречь. Это означает, что сообщалось о нескольких реализациях мобильных роботов в производственных средах — например, и.
Компоненты
Мобильная платформа для роботов
В качестве мобильной базы используются как классические транспортные системы без водителя, так и мобильные роботы. Использование мобильного робота имеет то преимущество, что он может свободно и автономно перемещаться по комнате, и поэтому манипулятор в случае проблем (цель вне досягаемости, манипуляция с текущим положением из кинематики невозможна, изменение положения частей для обработки и т. д.) может напрямую поддерживать, а не переносить его только в фиксированное положение.Маневренность платформы очень важна. В отличие от FTS, мобильный робот также может в любой момент подходить к динамически назначенным позициям. Однако классическая дифференциальная кинематика, особенно в непосредственной близости от рабочих станций, достигает своих пределов, и робот может двигаться только более или менее сложным маневрированием. Использование Таким образом, всенаправленные диски становятся все более популярными.
Варианты хранения
Если мобильный манипулятор также эффективно транспортирует объекты, он должен быть оснащен подходящими хранилищами. Они могут, с соответствующей конструкцией, также использоваться, чтобы позволить изменение рукоятки, без использования второго рычага.(Например, пивная бутылка, которая была вытащена из коробки на крышке, должна быть припаркована и зажата на теле, прежде чем ее можно будет вылить). Большие возможности хранения делают работу робота более эффективной в принципе, но также затрудняют навигацию по транспортному средству.
Рукоятка манипулятора
Это может быть как промышленный робот, так и специально разработанная роботизированная рука. Благодаря выбору небольших и легких роботизированных вооружений, имеющихся в настоящее время в продаже, использование саморазвитых рук значительно сократилось. (См. Также: Гибкий рычаг манипулятора)
Gripper
Конечный эффектор должен быть выбран в соответствии с элементом, который нужно манипулировать. Антропоморфные захваты с несколькими движущимися пальцами становятся все более доступными и используются в основном в исследованиях.
Обработка изображения
Когда робот должен манипулировать деталями в рабочей среде, система обработки изображений почти всегда требуется. Если должны выполняться только движения фиксированных рычагов, необходимо определить и принять во внимание, по крайней мере, смещение между током и положением платформы, используемым во время тренировки. Для того, чтобы взять на себя выполнение задач рабочих-людей, робот должен также справляться с более или менее неупорядоченными частями (также известными как ручка в коробке) или с переменными местами хранения.
Координационный контроль
Индивидуальные средства управления мобильными роботами и роботизированными вооружениями используются в течение десятилетий и хорошо развиты. Однако при объединении обеих систем возникает очень большое число возможных ошибок и проблемных ситуаций, из-за чего необходимо добавить дополнительный координационный элемент управления. Прежде всего, это должно найти решения независимо, если упорядоченная манипуляция не может быть выполнена, но это можно было бы сделать из другой позы.Полезно управлять всей системой как замкнутой кинематической цепью, что чрезвычайно сложно реализовать в реализации из-за высокой избыточности.
Система безопасности
В принципе, можно использовать предохранительные устройства, которые используются для стационарных манипуляторов или обычных автономных транспортных средств, а также для мобильных манипуляторов. Однако, когда мобильный манипулятор разделяет рабочую зону с людьми или, по крайней мере, с другими транспортными средствами, система безопасности подчиняется совершенно новым и очень требовательным требованиям, поскольку возникает много возможных опасных ситуаций.
Преимущества и недостатки
При объединении роботизированных мобильных платформ с роботизированными рукавами полученные преимущества и недостатки больше, чем сумма их соответствующих частей.
Преимущества:
Объем функций и возможных приложений — это прыжки и ограничения.
Вся система роботов становится значительно более независимой от поддерживающих систем (погрузочно-разгрузочные станции, погрузочно-разгрузочное оборудование, передаточное оборудование, …) и, таким образом, по крайней мере теоретически становится дешевле.
Мобильные манипуляторы также позволяют автоматизировать более сложные физические действия, которые ранее могли выполнять только люди, и часто вызывают проблемы со здоровьем из-за физических упражнений.
Общая система может более гибко реагировать на неточности и отклонения, например, отслеживая основание руки, когда объект не доступен напрямую.
Недостаток:
Из-за требований обоих компонентов они часто мешают друг другу:
Рука нуждается в большой стабильной базе для эффективной работы, но платформа должна быть небольшой и легкой, чтобы эффективно перемещаться.
Чем короче время цикла на платформе, тем быстрее он должен двигаться, а менее точные позиции цели достигнуты. Чем более неточно, но начальное положение руки известно, тем больше из-за требуемых поправок время цикла.
Чтобы увеличить срок службы платформы с батарейным питанием, общий вес и потребление энергии должны быть сведены к минимуму. Однако робот-манипулятор работает все более эффективно, тем больше функций (и, как правило, также дополнительных компонентов) он сочетает.
Тот факт, что рабочая среда рычага постоянно изменяется, многие ранее используемые вспомогательные конструкции (поставки частей относительно конечного положения руки, неизменяемые положения переноса для компонентов, определенное освещение и т. Д.) Уже не являются или только очень трудно использовать.
Кроме того, многие мобильные манипуляторы недостаточно гибки, чтобы их можно было использовать для быстро меняющихся задач. Это одно из самых больших запретов для широкого использования даже в малом и среднем бизнесе.
При взаимодействии с людьми возникают совершенно новые опасные ситуации, которые предъявляют повышенные требования к технике безопасности и серьезно ограничивают долю принудительных решений по сравнению с уже технически осуществимыми решениями.
В настоящее время нет полностью совместимых стандартов, рекомендаций или предложений по дизайну для этого типа роботов, что затрудняет прогнозирование возможных юридических последствий травмы или ущерба.
С увеличением числа опций также непропорционально более высокие требования к управлению всей системой связаны, особенно в отношении автономной обработки ошибок.Это также увеличивает риск простоя машины.
Области применения
Потенциальные области применения мобильных манипуляторов разнообразны и в настоящее время не полностью предсказуемы. Некоторые известные приложения:
Услуги по доставке на дом
Во главе с широко распространенным применением пива в основном используются в исследовательских проектах в области сервисной робототехники, предпочтительно задачи для демонстрационных целей, которые также встречаются в частных домашних хозяйствах и соответственно эффективны в средствах массовой информации. Научная задача в этих задачах обычно значительно выше ожидаемых экономических выгод.
уход
По мере увеличения доли пожилых и зависимых людей, так же как и потребность в медсестрах. Ожидается, что к 2050 году доля людей, нуждающихся в уходе, утроится по сравнению с числом занятых. Таким образом, в различных научно-исследовательских проектов, особенно в Японии, работал трудно ухаживать роботов.
собирание
В настоящее время разрабатываются проекты по использованию мобильных манипуляторов при сборе тяжелых или громоздких компонентов. Ошибки, которые могут вызывать высокие последующие расходы, предотвращаются. Кроме того, человеческие работники освобождаются от долгосрочных нездоровых задач, что становится более актуальным, в то время как средний возраст рабочей силы увеличивается.
График
| Год | Имя робота | Компания / Научно-исследовательский институт |
|---|---|---|
| 1996 | Hilare 2bis | LAAS-CNRS, Франция |
| 2000 | Жауме | Лаборатория роботизированного интеллекта, Университет Жауме I, Испания |
| 2004 | Фаусто | Университет Вероны, Италия |
| 2006 | Neobotix MM-500 | Neobotix GmbH, Германия |
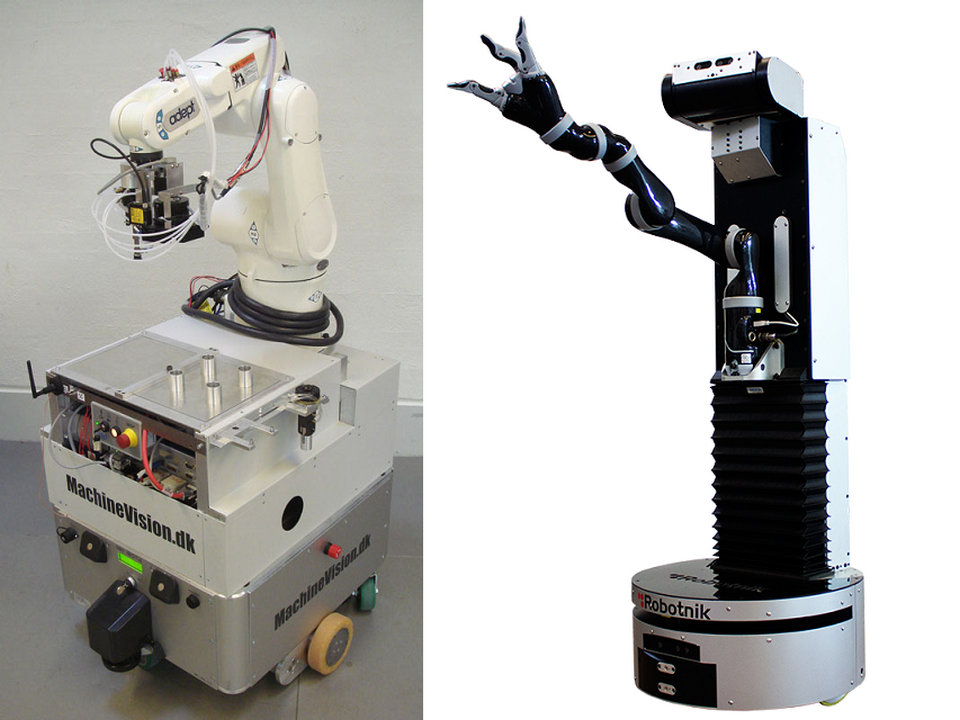
| 2009 | Маленький помощник | Отдел производства, Ольборгский университет, Дания |
| 2012 | G-WAM | Robotnik Automation & Barrett Technologies, Испания и США |
| 2013 | UBR-1 | Неограниченная робототехника, США |
| 2013 | X-WAM | Robotnik Automation & Barrett Technologies, Испания и США |
| 2015 | КАРЛОС | AIMEN, Испания |
| 2015 | RB-1 | Robotnik Automation & Kinova Robotics, Испания и Канада |
Уровень развития
Одним из недавних примеров является мобильный манипулятор «Маленький помощник» из Департамента производства в Ольборгском университете.