Manipolatore mobile

Il manipolatore mobile è oggigiorno un termine molto diffuso per riferirsi a sistemi di robot costruiti da un braccio di manipolatore robotizzato montato su una piattaforma mobile. Tali sistemi combinano i vantaggi delle piattaforme mobili e dei bracci robotici manipolatori e riducono i loro inconvenienti. Ad esempio, la piattaforma mobile estende lo spazio di lavoro del braccio, mentre un braccio offre diverse funzionalità operative.
Descrizione
Un sistema di manipolazione mobile offre un duplice vantaggio della mobilità offerta da una piattaforma mobile e la destrezza offerta dal manipolatore. La piattaforma mobile offre spazio di lavoro illimitato al manipolatore. I livelli extra di libertà della piattaforma mobile offrono anche all’utente maggiori possibilità di scelta. Tuttavia, il funzionamento di un tale sistema è impegnativo a causa dei molti gradi di libertà e dell’ambiente non strutturato in cui si svolge.
Composizione generale del sistema:
Piattaforma mobile
Robot manipolatore
Visione
Tooling
Motivazione
Al momento la manipolazione mobile è un argomento di grande interesse negli ambienti di sviluppo e di ricerca e i manipolatori mobili, sia autonomi che telegestiti, sono utilizzati in molte aree, ad esempio esplorazione spaziale, operazioni militari, assistenza domiciliare e assistenza sanitaria. Tuttavia, in ambito industriale l’implementazione di manipolatori mobili è stata limitata, sebbene siano presenti le esigenze di automazione intelligente e flessibile. Inoltre, le entità tecnologiche necessarie (piattaforme mobili, robot manipolatori, visione e strumenti) sono, in larga misura, componenti disponibili in commercio.
Una ragione di ciò è che le industrie manifatturiere agiscono tradizionalmente e, pertanto, sono riluttanti ad assumersi dei rischi implementando nuove tecnologie. Inoltre, nell’ambito della manipolazione mobile industriale, il centro dell’attenzione è stato l’ottimizzazione delle singole tecnologie, in particolare i manipolatori e gli utensili per robot, mentre l’integrazione, l’uso e l’applicazione sono stati trascurati. Ciò significa che sono state segnalate poche implementazioni di robot mobili, in ambienti di produzione, ad esempio e.
componenti
Piattaforma robot mobile
Come base mobile, vengono utilizzati sia i classici sistemi di trasporto senza conducente che i robot mobili. L’uso di un robot mobile ha il vantaggio di poter navigare liberamente e autonomamente nella stanza e quindi il manipolatore in caso di problemi (obiettivo fuori portata, manipolazione della posizione corrente da cinematica non possibile, modifica della posizione delle parti da lavorare, ecc.) può supportare direttamente invece di trasportarlo solo in una posizione fissa. La manovrabilità della piattaforma è molto importante. Al contrario di FTS, un robot mobile può anche accedere a posizioni dinamiche assegnate in qualsiasi momento. Tuttavia, la classica cinematica differenziale, specialmente nelle immediate vicinanze delle postazioni di lavoro, raggiunge i propri limiti e il robot può essere mosso solo da manovre più o meno complicate. L’utilizzo Pertanto, le unità omnidirezionali stanno diventando sempre più popolari.
Opzioni di archiviazione
Se il manipolatore mobile è anche per trasportare oggetti in modo efficiente, deve essere dotato di strutture di stoccaggio adeguate. Questi possono, con una progettazione appropriata, essere utilizzati anche per consentire il cambio della maniglia, senza che venga utilizzato un secondo braccio. (Ad esempio, una bottiglia di birra che è stata tirata fuori dalla scatola alla chiusura deve essere parcheggiata e afferrata sul corpo prima che possa essere versata). Le più grandi opzioni di stoccaggio rendono il lavoro del robot più efficiente in linea di principio, ma rendono anche più difficile la navigazione del veicolo.
Braccio manipolatore
Questo può essere sia un robot industriale che un braccio robotico appositamente sviluppato. Con una selezione di armi robotiche piccole e leggere ora disponibili in commercio, l’uso di armi auto-sviluppate è diminuito significativamente. (Vedi anche: braccio manipolatore flessibile)
gripper
L’effettore finale deve essere selezionato per adattarsi all’oggetto da manipolare. Pinze antropomorfe con dita mobili multiple sono sempre più disponibili e vengono utilizzate principalmente nella ricerca.
Elaborazione delle immagini
Quando il robot deve manipolare parti nell’ambiente di lavoro, è quasi sempre richiesto un sistema di elaborazione delle immagini. Se devono essere eseguiti solo movimenti del braccio fissi, deve essere determinato e considerato almeno lo spostamento tra la posizione corrente e la posizione della piattaforma utilizzata durante l’allenamento. Per assumere i compiti degli operatori umani, il robot deve anche far fronte a parti più o meno disordinate (note anche come una maniglia nella scatola) oa posizioni di stoccaggio variabili.
Controllo coordinatore
I controlli individuali di robot mobili e bracci robotici sono in uso da decenni e sono ben sviluppati. Quando si combinano entrambi i sistemi, tuttavia, emerge un numero molto elevato di possibili errori e casi problematici che rende necessario aggiungere un ulteriore controllo di coordinamento. Soprattutto, questo dovrebbe trovare soluzioni indipendentemente se la manipolazione ordinata non può essere eseguita, ma sarebbe possibile farlo da un’altra posa. È utile controllare l’intero sistema come una catena cinematica chiusa, che è estremamente difficile da implementare nell’implementazione a causa dell’elevata ridondanza.
Sistema di sicurezza
In linea di principio, è possibile utilizzare i dispositivi di sicurezza utilizzati per i bracci manipolatori fissi o normali veicoli autonomi, anche per manipolatori mobili. Tuttavia, quando un manipolatore mobile condivide l’area di lavoro con persone o almeno altri veicoli, il sistema di sicurezza è soggetto a requisiti completamente nuovi e molto impegnativi, poiché sorgono molte possibili situazioni pericolose.
Vantaggi e svantaggi
Quando si combinano piattaforme mobili robotizzate con bracci robotici, i vantaggi e gli svantaggi risultanti sono maggiori della somma delle rispettive parti.
vantaggi:
Lo scopo delle funzioni e le possibili applicazioni sono passi da gigante.
L’intero sistema robotico diventa significativamente più indipendente dai sistemi di supporto (stazioni di carico e scarico, attrezzature per la movimentazione dei materiali, attrezzature di trasferimento, …) e può quindi, almeno teoricamente, diventare più economico.
I manipolatori mobili consentono inoltre di automatizzare attività fisiche più complesse che in precedenza potevano essere eseguite solo dall’uomo e spesso causano problemi di salute dovuti all’esercizio fisico.
Il sistema generale può reagire in modo molto più flessibile alle imprecisioni e alle deviazioni, ad esempio rilevando la base del braccio quando un oggetto non è direttamente accessibile.
Svantaggio:
A causa dei requisiti di entrambi i componenti, questi spesso interferiscono tra loro:
Il braccio ha bisogno di una grande base stabile per funzionare in modo efficiente, ma la piattaforma deve essere piccola e leggera per navigare in modo efficiente.
Più breve è il tempo di ciclo della piattaforma, più veloce deve guidare e vengono raggiunte le posizioni di destinazione meno precise. Più l’imprecisione è nota, ma la posizione iniziale del braccio è nota, più sono dovuti alle correzioni necessarie per i suoi tempi di ciclo.
Per aumentare la durata di una piattaforma alimentata a batteria, il peso totale e il consumo energetico devono essere ridotti al minimo. Tuttavia, un braccio robot funziona in modo più efficiente, più funzioni (e quindi di solito anche componenti aggiuntivi) che combina.
Il fatto che l’ambiente di lavoro del braccio sia in continua evoluzione, molte strutture ausiliarie precedentemente utilizzate (fornitura di parti relative alla posizione finale definita dal braccio, posizioni di trasferimento immutabili per componenti, illuminazione definita, ecc.) Non sono più o sono solo molto difficili da uso.
Inoltre, molti manipolatori mobili non sono abbastanza flessibili da poter essere utilizzati per attività che cambiano rapidamente. Questa è una delle più grandi inibizioni per l’uso diffuso anche nelle piccole e medie imprese.
Quando si interagisce con le persone, si presentano situazioni di pericolo completamente nuove, che pongono maggiori richieste alla tecnologia di sicurezza e limitano fortemente la proporzione di soluzioni attuabili rispetto alle soluzioni già tecnicamente fattibili.
Attualmente non ci sono standard, linee guida o proposte di progettazione pienamente conformi per questo tipo di robot, rendendo difficile prevedere le potenziali conseguenze legali di lesioni o danni.
Con l’aumento del numero di opzioni sono collegate anche richieste sproporzionatamente più elevate sul controllo dell’intero sistema, in particolare per quanto riguarda la gestione autonoma degli errori. Ciò aumenta anche il rischio di fermo macchina.
Aree di applicazione
I potenziali campi di applicazione dei manipolatori mobili sono diversi e attualmente non completamente prevedibili. Alcune applicazioni note sono:
Servizi di consegna a domicilio
Guidati dalla diffusa applicazione della birra, i getten sono utilizzati principalmente in progetti di ricerca nel campo della robotica di servizio, preferibilmente compiti a scopo dimostrativo, che si verificano anche nelle case private e di conseguenza sono efficaci nei media. La sfida scientifica in questi compiti è di solito considerevolmente più alta dei benefici economici attesi.
Cura
Con l’aumentare della percentuale di persone anziane e dipendenti, aumenterà anche il bisogno di infermiere. Si prevede che entro il 2050 la percentuale di persone bisognose di assistenza triplicherà in relazione al numero di persone occupate. quindi, in vari progetti di ricerca, specialmente in Giappone, ha lavorato duramente per curare i robot.
scelta
Attualmente sono in corso progetti di sviluppo per utilizzare manipolatori mobili nella raccolta di componenti pesanti o ingombranti. Ci sono errori, che possono causare alti costi di follow-up, sono impediti. Inoltre, i lavoratori umani sono liberati da compiti insalubri a lungo termine, che diventano più rilevanti quanto più aumenta l’età media della forza lavoro.
Sequenza temporale
Anno Nome del robot Istituto di ricerca / società
1996 Hilare 2bis LAAS-CNRS, Francia
2000 Jaume Laboratorio di Robotic Intelligence, Università Jaume I, Spagna
2004 FAUSTO Università di Verona, Italia
2006 Neobotix MM-500 Neobotix GmbH, Germania
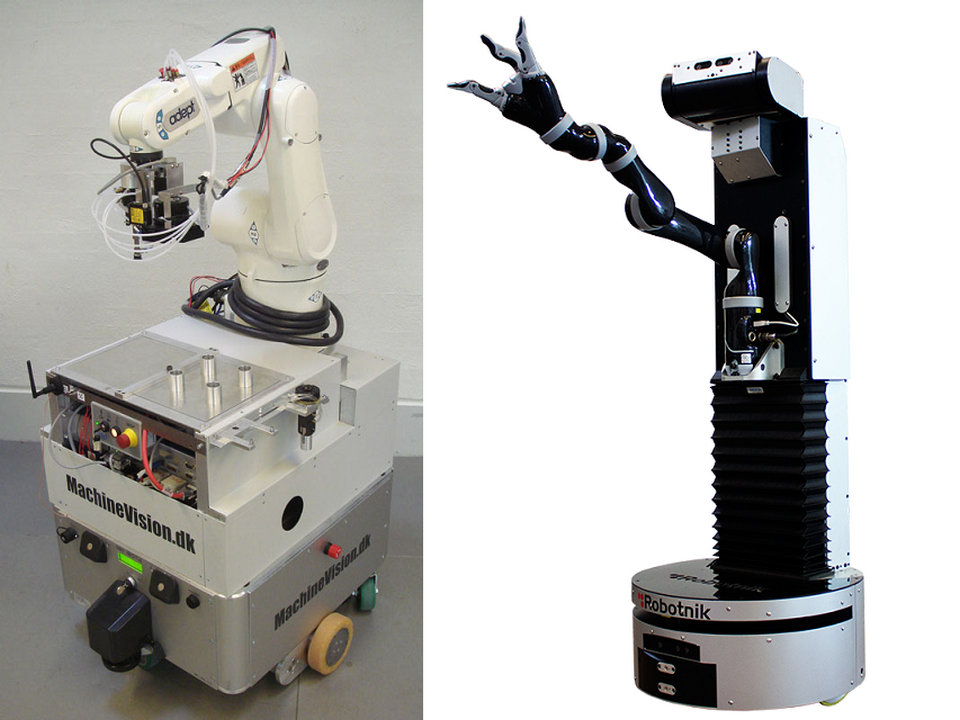
2009 Piccolo aiuto Dipartimento di produzione, Università di Aalborg, Danimarca
2012 G-WAM Robotnik Automation & Barrett Technologies, Spagna e Stati Uniti
2013 UBR-1 Robotica illimitata, Stati Uniti
2013 X-WAM Robotnik Automation & Barrett Technologies, Spagna e Stati Uniti
2015 Carlos AIMEN, Spagna
2015 RB-1 Robotnik Automation & Kinova Robotics, Spagna e Canada
All’avanguardia
Un esempio recente è il manipolatore mobile “Little Helper” del Dipartimento di produzione dell’Università di Aalborg.