Il muscolo artificiale è un termine generico utilizzato per attuatori, materiali o dispositivi che imitano il muscolo naturale e possono contrarsi, espandersi o ruotare in senso inverso all’interno di un componente a causa di uno stimolo esterno (come tensione, corrente, pressione o temperatura). Le tre risposte di attuazione di base – contrazione, espansione e rotazione – possono essere combinate insieme in un singolo componente per produrre altri tipi di movimenti (ad esempio piegando, contraendo un lato del materiale mentre si espande l’altro lato). I motori convenzionali e gli attuatori pneumatici lineari o rotanti non si qualificano come muscoli artificiali, poiché vi è più di un componente coinvolto nell’azionamento.
A causa della loro elevata flessibilità, versatilità e rapporto peso / potenza rispetto ai tradizionali attuatori rigidi, i muscoli artificiali hanno il potenziale per essere una tecnologia emergente altamente dirompente. Sebbene attualmente in uso limitato, la tecnologia potrebbe avere ampie applicazioni future nell’industria, nella medicina, nella robotica e in molti altri campi.
Panoramica
Questi includono non solo quelli che imitano l’effettiva struttura muscolare animale da parte delle biotecnologie, ma anche attuatori che generano energia modificando lo stato consumando energia elettrica, magnetica o chimica.
Esistono vari tipi di muscoli artificiali come il tipo piezoelettrico, la lega a memoria di forma, il tipo elettrostatico, il tipo pneumatico e simili, ma recentemente quelli che usano polimeri come la resina sintetica attirano l’attenzione. Si dice che sia un attuatore morbido, perché il materiale da utilizzare è morbido, il movimento è flessibile e supporta anche forze esterne.
Nel dispositivo meccanico, vi è una tendenza ad emettere un impulso predeterminato rispetto all’energia di ingresso, ma se esiste qualche restrizione fisicamente, la barriera o il dispositivo meccanico stesso sarà danneggiato. Nel muscolo artificiale, sebbene l’esercizio sia eseguito con una certa larghezza rispetto all’energia di ingresso, nello stesso momento in cui una forza viene immessa dall’esterno o non è possibile mostrare un momento predeterminato, questa stessa unità di potenza genera una quantità eccessiva di moto la forma di distorsione Si ritiene che abbia la funzione di prevenire l’assorbimento, la distruzione dell’apparecchiatura e il danneggiamento dell’oggetto.
Queste fonti di energia “morbide” possono temporaneamente collocare l’energia che la coppia meccanica viene eccessivamente consumata a causa dell’attrito all’interno e all’esterno del meccanismo, sotto forma di elasticità, così abbiamo sviluppato un dispositivo più efficiente Oltre al fatto che gli elementi e le strutture della macchina non generare energia, ma il materiale stesso è una fonte di energia, si può dire che è utile per la miniaturizzazione del dispositivo.
Tuttavia, dal 2010, per quanto riguarda i materiali utilizzati come muscoli artificiali, molti materiali piezoelettrici e polimerici si trovano nelle fasi di sviluppo e di ricerca, molti non possono essere prodotti in serie a basso costo • Non è possibile convertire l’energia in ingresso in quantità di moto. i prodotti venduti come prodotti generalmente utilizzabili sono limitati, a causa della bassa efficienza di conversione e dei problemi di resistenza alla pressione / durata, sembra che ci voglia del tempo per diffondersi. La funzione di attuatore può essere ottenuta applicando il principio del motore compatto disponibile in commercio, del motore lineare (incluso il motore della bobina mobile ecc.), Questo può essere usato come prodotti esistenti poco costosi disponibili come moduli I prodotti che li utilizzano sono mainstream perché possono farlo.
Confronto con i muscoli naturali
Sebbene non esista una teoria generale che consenta di confrontare gli attuatori, esistono “criteri di potenza” per le tecnologie dei muscoli artificiali che consentono di specificare le nuove tecnologie degli attuatori rispetto alle proprietà muscolari naturali. In breve, i criteri includono stress, deformazione, velocità di deformazione, durata del ciclo e modulo elastico. Alcuni autori hanno preso in considerazione altri criteri (Huber et al., 1997), come la densità dell’attuatore e la risoluzione della deformazione. A partire dal 2014, le fibre muscolari artificiali più potenti esistenti possono offrire un aumento di potenza di cento volte su lunghezze equivalenti di fibre muscolari naturali.
I ricercatori misurano la velocità, la densità energetica, la potenza e l’efficienza dei muscoli artificiali; nessun tipo di muscolo artificiale è il migliore in tutte le aree.
tipi
I muscoli artificiali possono essere divisi in tre gruppi principali in base al loro meccanismo di attuazione.
Attuazione del campo elettrico
I polimeri elettroattivi (EAP) sono polimeri che possono essere attivati attraverso l’applicazione di campi elettrici. Attualmente, gli EAP più importanti includono polimeri piezoelettrici, attuatori dielettrici (DEA), elastomeri a innesto elettrostrittivi, elastomeri a cristalli liquidi (LCE) e polimeri ferroelettrici. Mentre questi EAP possono essere fatti piegare, le loro basse capacità per il movimento della coppia al momento limitano la loro utilità come muscoli artificiali. Inoltre, senza un materiale standard accettato per la creazione di dispositivi EAP, la commercializzazione è rimasta impraticabile. Tuttavia, dagli anni ’90 sono stati compiuti progressi significativi nella tecnologia EAP.
Azionamento a base di ioni
Gli EAP ionici sono polimeri che possono essere attivati attraverso la diffusione di ioni in una soluzione elettrolitica (oltre all’applicazione di campi elettrici). Esempi attuali di polimeri elettroattivi ionici includono gel polielettrodi, compositi metallici polimerici ionomerici (IPMC), polimeri conduttivi e fluidi elettroreologici (ERF). Nel 2011, è stato dimostrato che i nanotubi di carbonio intrecciati potevano anche essere attivati applicando un campo elettrico.
Azionamento elettrico
I muscoli intrecciati e polimerici a spirale (TCP) noti anche come polimero supercoiled (SCP) sono polimeri a spirale che possono essere azionati mediante energia elettrica. Un muscolo TCP sembra una molla elicoidale. I muscoli TCP sono generalmente realizzati in nylon rivestito di argento. Il muscolo TCP può anche essere fatto da un altro cappotto elettrico di conduttanza come l’oro. I muscoli TCP dovrebbero essere sotto carico per mantenere il muscolo esteso. L’energia elettrica si trasforma in energia termica grazie alla resistenza elettrica, nota anche come riscaldamento Joule, riscaldamento Ohmic e riscaldamento resistivo. Quando la temperatura del muscolo TCP aumenta con il riscaldamento di Joule, il polimero si contrae e provoca la contrazione muscolare.
Azionamento pneumatico
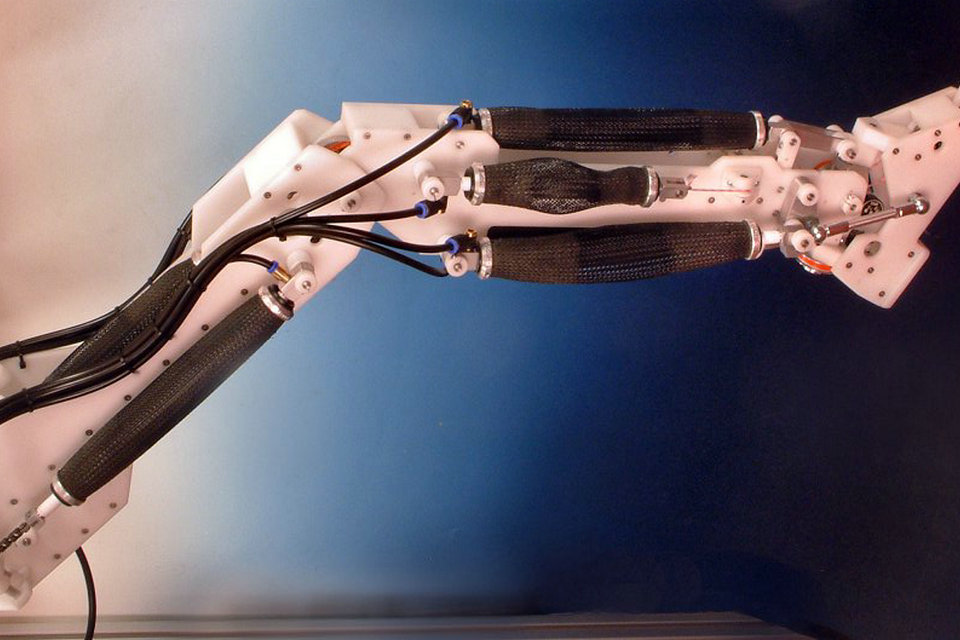
I muscoli artificiali pneumatici (PAM) funzionano riempiendo una camera d’aria pneumatica con aria pressurizzata. Applicando la pressione del gas alla vescica, si verifica un’espansione del volume isotropo, ma è limitata da fili intrecciati che circondano la vescica, traducendo l’espansione del volume in una contrazione lineare lungo l’asse dell’attuatore. I PAM possono essere classificati in base al loro funzionamento e design; In particolare, i PAM sono caratterizzati da funzionamento pneumatico o idraulico, funzionamento in sovrapressione o sottopressione, membrane intrecciate / retinate o incorporate e membrane di allungamento o riarrangiamento delle membrane. Tra i PAM più comunemente usati oggi c’è un muscolo intrecciato cilindrico, noto come McKibben Muscle, sviluppato per la prima volta da J. L. McKibben negli anni ’50.
Azionamento termico
Lenza
I muscoli artificiali costruiti dalla normale lenza e il filo da cucito possono sollevare 100 volte più peso e generare 100 volte più energia di un muscolo umano della stessa lunghezza e peso.
I muscoli artificiali basati sulla linea di pesca hanno già un costo di ordine di grandezza inferiore (per libbra) rispetto alla lega a memoria di forma o al filato di nanotubi di carbonio; ma attualmente hanno un’efficienza relativamente scarsa.
Le macromolecole individuali sono allineate con la fibra in fibre polimeriche disponibili in commercio. Avviandoli in bobine, i ricercatori creano muscoli artificiali che si contraggono a velocità simili ai muscoli umani.
Una fibra polimerica (non ritorta), come la linea di pesca in polietilene o il filo da cucito in nylon, a differenza della maggior parte dei materiali, si accorcia quando riscaldata fino a circa il 4% per un aumento della temperatura di 250 K. Torcendo la fibra e avvolgendo la fibra intrecciata in una bobina, il riscaldamento provoca il serraggio della bobina e la riduzione fino al 49%. I ricercatori hanno trovato un altro modo per avvolgere la bobina in modo tale che il riscaldamento faccia aumentare la bobina del 69%.
Un’applicazione di muscoli artificiali attivati termicamente è quella di aprire e chiudere automaticamente le finestre, rispondendo alla temperatura senza utilizzare alcuna potenza.
Minuscoli muscoli artificiali composti da nanotubi di carbonio intrecciati riempiti con paraffina sono 200 volte più forti dei muscoli umani.
Leghe a memoria di forma
Le leghe a memoria di forma (SMA), gli elastomeri cristallini liquidi e le leghe metalliche che possono essere deformate e quindi riportate alla loro forma originale quando esposte al calore, possono funzionare come muscoli artificiali. I muscoli artificiali basati su attuatori termici offrono resistenza al calore, resistenza agli urti, bassa densità, elevata resistenza a fatica e una notevole generazione di forza durante i cambi di forma. Nel 2012, è stata dimostrata una nuova classe di muscoli artificiali attivati da elettroliti, attivati dal campo elettrico, denominati “attuatori a filo ritorto”, basati sull’espansione termica di un materiale secondario all’interno della struttura a torsione conduttiva del muscolo. È stato anche dimostrato che un nastro di diossido di vanadio arrotolato può ruotare e districare a una velocità di torsione di 200.000 giri / min.
Muscolo artificiale con polimero
Electric Responsive Polymer (versione inglese) (Electroactive Polymers: EAP)
Film polimerico conduttivo ionico (ICPF: film polimerico conduttore ionico)
Nel 1991, è stato inventato da Keisuke Oguchi (Istituto di ricerca tecnologica industriale di Osaka, Istituto nazionale di scienza e tecnologia industriale avanzata, ex AIST) e altri.
Metallo nobile (oro, platino) placcato elettroliticamente su entrambi i lati della pellicola di acido perfluoro solfonico (PFS) e flessione ad alta velocità quando la tensione viene applicata ad entrambi gli elettrodi laterali.
Muscolo artificiale che utilizza la pressione pneumatica
Muscoli artificiali pneumatici (PAM)
Tipo McKibben (muscolo artificiale)
Nel 1961 fu sviluppato da Joseph McKibben.
Ha la forma di un tubo di gomma ricoperto di fibra di nylon e si contrae applicando aria compressa all’interno.
Origami Robot – sviluppato da MIT Computer Science e Artificial Intelligence Laboratory (CSAIL). Muscolo artificiale che combina struttura origami e sottovuoto. Estraendo l’aria all’interno del pacco sottovuoto, la carta pieghevole interna si deforma e diventa uno scheletro.
Muscoli artificiali che usano elettricità e magnetismo
Usando il fluido elettroreologico
Utilizzo di fluido viscoso magnetico (fluido magnetoreologico)
Usando l’attrazione elettrostatica
Un attuatore che utilizza la forza elettrostatica, come “motore elettrostatico ad alta potenza” in ricerca e sviluppo da Higuchi • laboratorio Yamamoto dell’Università di Tokyo, può anche essere applicato come muscolo artificiale. Video di polimeri elettroattivi in azione
Fibra muscolare CNT
Un muscolo artificiale strutturato per contrarsi aggiungendo una tensione di circa 5 kV a un nanotubo di carbonio lavorato è stato sviluppato presso il Nanotechnology Research Institute dell’Università del Texas a Dallas. Il muscolo artificiale ha solo una densità leggermente più pesante dell’aria, ha un rapido tasso di contrazione ed è 30 volte più potente per area rispetto al muscolo biologico. (Si noti che non è particolarmente forte rispetto ad altri muscoli artificiali che trenta volte il muscolo del corpo.
Sistemi di controllo
I tre tipi di muscoli artificiali hanno diversi vincoli che influenzano il tipo di sistema di controllo che richiedono per l’attuazione. È importante notare, tuttavia, che i sistemi di controllo sono spesso progettati per soddisfare le specifiche di un determinato esperimento, con alcuni esperimenti che richiedono l’uso combinato di una varietà di attuatori diversi o uno schema di controllo ibrido. Come tale, i seguenti esempi non dovrebbero essere trattati come un elenco esauriente della varietà di sistemi di controllo che possono essere impiegati per attuare un dato muscolo artificiale.
Controllo di tensione
I muscoli del polimero twistato e a spirale (TCP) possono essere modellati da spazi di stato tempo-invarianti lineari del primo ordine quando l’input è la tensione elettrica, con una precisione superiore all’85%. Pertanto, i muscoli TCP possono essere facilmente controllati da un controller PID digitale. Un controller fuzzy può essere utilizzato per accelerare il controller PID.
Controllo EAP
Gli EAP offrono peso ridotto, risposta più rapida, maggiore densità di potenza e funzionamento più silenzioso rispetto agli attuatori tradizionali. Sia gli EAP elettrici che quelli ionici vengono principalmente attivati mediante loop di controllo di feedback, meglio noti come sistemi di controllo a circuito chiuso.
Controllo pneumatico
Attualmente ci sono due tipi di muscoli artificiali pneumatici (PAM). Il primo tipo ha una singola vescica circondata da una guaina intrecciata e il secondo tipo ha una doppia vescica.
Singola camera d’aria circondata da una manica intrecciata
I muscoli artificiali pneumatici, pur essendo leggeri e poco costosi, rappresentano un problema di controllo particolarmente difficile in quanto sono entrambi altamente non lineari e hanno proprietà, come la temperatura, che fluttuano significativamente nel tempo. I PAM sono generalmente costituiti da componenti in gomma e plastica. Quando queste parti entrano in contatto l’una con l’altra durante l’attuazione, la temperatura del PAM aumenta, portando infine a cambiamenti permanenti nella struttura del muscolo artificiale nel tempo. Questo problema ha portato a una varietà di approcci sperimentali. In sintesi (fornito da Ahn et al.), I sistemi di controllo sperimentali vitali includono il controllo PID, il controllo adattativo (Lilly, 2003), il controllo predittivo ottimale non lineare (Reynolds et al., 2003), il controllo della struttura variabile (Repperger et al., 1998 ; Medrano-Cerda et al., 1995), schedulazione del guadagno (Repperger et al., 1999) e vari approcci di soft computing incluso controllo di algoritmi di addestramento della rete neurale Kohonen (Hesselroth et al., 1994), controllo della rete neurale / controllo PID non lineare ( Ahn e Thanh, 2005) e neuro-fuzzy / controllo genetico (Chan et al., 2003; Lilly et al., 2003).
I problemi di controllo riguardanti i sistemi altamente non lineari sono stati generalmente affrontati attraverso un approccio trial-and-error attraverso il quale i “modelli fuzzy” (Chan et al., 2003) delle capacità comportamentali del sistema potrebbero essere presi in esame (dai risultati sperimentali del sistema specifico in fase di test) da un esperto umano esperto. Tuttavia, alcune ricerche hanno impiegato “dati reali” (Nelles O., 2000) per addestrare la precisione di un dato modello fuzzy evitando allo stesso tempo le complessità matematiche dei modelli precedenti. L’esperimento di Ahn et al. È semplicemente un esempio di recenti esperimenti che utilizzano algoritmi genetici modificati (MGA) per addestrare modelli fuzzy utilizzando dati sperimentali input-output da un braccio robot PAM.
Doppia vescica
Questo attuatore è costituito da una membrana esterna con una membrana flessibile interna che divide l’interno del muscolo in due parti. Un tendine è fissato alla membrana ed esce dal muscolo attraverso una manica in modo che il tendine possa contrarsi nel muscolo. Un tubo consente all’aria di entrare nella vescica interna, che quindi si espande nella vescica esterna. Un vantaggio chiave di questo tipo di muscolo pneumatico è che non vi è alcun movimento potenzialmente distruttivo della vescica contro un manicotto esterno.
Controllo termico
I muscoli artificiali SMA, pur essendo leggeri e utili in applicazioni che richiedono grande forza e spostamento, presentano anche problemi di controllo specifici; vale a dire, i muscoli artificiali SMA sono limitati dalle loro relazioni isteretiche input-output e dai limiti di larghezza di banda. Come Wen et al. Discutere, il fenomeno di trasformazione di fase di SMA è “isteretico” in quanto il filamento di SMA di uscita risultante dipende dalla storia del suo input di calore. Per quanto riguarda le limitazioni della larghezza di banda, la risposta dinamica di un attuatore SMA durante le trasformazioni di fase isterica è molto lenta a causa della quantità di tempo necessario affinché il calore si trasferisca al muscolo artificiale SMA. Sono state condotte pochissime ricerche sul controllo SMA a causa di ipotesi che riguardano le applicazioni SMA come dispositivi statici; tuttavia, una varietà di approcci di controllo è stata testata per affrontare il problema di controllo della non linearità isterica.
Generalmente, questo problema ha richiesto l’applicazione della compensazione a ciclo aperto o del controllo di retroazione ad anello chiuso. Per quanto riguarda il controllo ad anello aperto, il modello Preisach è stato spesso utilizzato per la sua semplice struttura e capacità di facile simulazione e controllo (Hughes and Wen, 1995). Per quanto riguarda il controllo a ciclo chiuso, è stato utilizzato un approccio basato sulla passività che analizza la stabilità a circuito chiuso SMA (Madill and Wen, 1994). Lo studio di Wen et al. Fornisce un altro esempio di controllo di retroazione ad anello chiuso, dimostrando la stabilità del controllo ad anello chiuso nelle applicazioni SMA applicando una combinazione di controllo di retroazione della forza e controllo di posizione su un fascio di alluminio flessibile azionato da una SMA prodotta da Nitinol.
applicazioni
Le tecnologie dei muscoli artificiali hanno ampie potenzialità applicative nelle macchine biomimetiche, inclusi robot, attuatori industriali ed esoscheletri alimentati. I muscoli artificiali basati su EAP offrono una combinazione di leggerezza, bassi requisiti di potenza, resilienza e agilità per la locomozione e la manipolazione. I futuri dispositivi EAP avranno applicazioni nel settore aerospaziale, automobilistico, della medicina, della robotica, dei meccanismi di articolazione, dell’intrattenimento, dell’animazione, dei giocattoli, dell’abbigliamento, delle interfacce tattili e tattili, del controllo del rumore, dei trasduttori, dei generatori di energia e delle strutture intelligenti.
I muscoli artificiali pneumatici offrono anche maggiore flessibilità, controllabilità e leggerezza rispetto ai cilindri pneumatici convenzionali. La maggior parte delle applicazioni PAM comporta l’utilizzo di muscoli tipo McKibben. Gli attuatori termici come le SMA hanno varie applicazioni militari, mediche, di sicurezza e robotiche e potrebbero inoltre essere utilizzati per generare energia attraverso cambiamenti di forma meccanici.