Le terme muscle artificiel est un terme générique utilisé pour désigner des actionneurs, des matériaux ou des dispositifs imitant le muscle naturel et pouvant se contracter, s’étendre ou pivoter de manière réversible au sein d’un composant en raison d’un stimulus externe (tension, courant, pression ou température). Les trois réponses d’actionnement de base – contraction, expansion et rotation – peuvent être combinées dans un même composant pour produire d’autres types de mouvements (par exemple, flexion, en contractant un côté du matériau tout en élargissant l’autre côté). Les moteurs conventionnels et les actionneurs pneumatiques linéaires ou rotatifs ne sont pas qualifiés de muscles artificiels, car plusieurs composants sont impliqués dans l’actionnement.
En raison de leur grande flexibilité, de leur polyvalence et de leur rapport poids / poids comparé aux actionneurs rigides traditionnels, les muscles artificiels peuvent constituer une technologie émergente extrêmement perturbatrice. Bien que son utilisation soit actuellement limitée, la technologie pourrait avoir de nombreuses applications futures dans l’industrie, la médecine, la robotique et de nombreux autres domaines.
Vue d’ensemble
Ceux-ci incluent non seulement ceux imitant la structure musculaire réelle de l’animal par la biotechnologie, mais également des actionneurs qui génèrent de l’énergie en modifiant l’état en consommant de l’énergie électrique, magnétique ou chimique.
Il existe différents types de muscles artificiels tels que le type piézoélectrique, l’alliage à mémoire de forme, le type électrostatique, le type pneumatique et similaires, mais récemment, ceux utilisant un polymère tel qu’une résine synthétique attirent l’attention. On dit qu’il s’agit d’un actionneur souple, car le matériau à utiliser est souple, le mouvement est flexible et il supporte également des forces extérieures.
Dans le dispositif mécanique, il y a une tendance à produire un moment prédéterminé par rapport à l’énergie d’entrée, mais si une restriction existe physiquement, la barrière ou le dispositif mécanique lui-même sera endommagé. Dans le muscle artificiel, bien que l’exercice soit effectué avec une certaine largeur par rapport à l’énergie d’entrée, en même temps qu’une force est entrée de l’extérieur ou qu’un moment prédéterminé ne peut être affiché, ce groupe moteur génère lui-même un momentum excessif. la forme de distorsion On pense qu’elle a pour fonction d’empêcher l’absorption, la destruction de l’équipement et les dommages de l’objet.
Ces sources d’énergie « douces » peuvent temporairement générer de l’énergie sous la forme d’élasticité, ce qui entraîne une consommation excessive du couple mécanique en raison des frottements à l’intérieur et à l’extérieur du mécanisme. Nous avons donc mis au point un dispositif plus efficace. générer de l’énergie, mais le matériau lui-même est une source d’énergie, on peut dire qu’il est utile pour la miniaturisation de l’appareil.
Cependant, à partir de 2010, en ce qui concerne les matériaux utilisés comme muscles artificiels, de nombreux matériaux piézoélectriques et polymères sont en cours de développement et de recherche, beaucoup ne peuvent pas être produits en série à faible coût. • Il n’est pas possible de convertir l’énergie d’entrée en dynamique. Les produits vendus en tant que produits généralement utilisables sont limités, en raison de la faible efficacité de conversion et des problèmes de résistance à la pression / durabilité, il semble qu’il faille du temps pour les diffuser. La fonction d’actionneur peut être obtenue en appliquant le principe du moteur compact disponible dans le commerce, du moteur linéaire (y compris le moteur à bobine mobile), etc., ce qui peut être utilisé comme produits existants peu coûteux et disponibles en tant que modules. Les produits qui les utilisent sont courants car ils le peuvent.
Comparaison avec les muscles naturels
Bien qu’aucune théorie générale ne permette de comparer les actionneurs, il existe des « critères de puissance » pour les technologies de muscle artificiel qui permettent de spécifier de nouvelles technologies d’actionneur par rapport aux propriétés musculaires naturelles. En résumé, les critères incluent la contrainte, la contrainte, la vitesse de contrainte, la durée de vie du cycle et le module d’élasticité. Certains auteurs ont examiné d’autres critères (Huber et al., 1997), tels que la densité d’actionneur et la résolution de déformation. À partir de 2014, les fibres musculaires artificielles les plus puissantes existantes offrent une puissance multipliée par cent par rapport aux longueurs équivalentes de fibres musculaires naturelles.
Les chercheurs mesurent la vitesse, la densité énergétique, la puissance et l’efficacité des muscles artificiels. Aucun type de muscle artificiel n’est le meilleur dans tous les domaines.
Les types
Les muscles artificiels peuvent être divisés en trois groupes principaux en fonction de leur mécanisme d’actionnement.
Activation de champ électrique
Les polymères électroactifs (EAP) sont des polymères pouvant être actionnés par l’application de champs électriques. À l’heure actuelle, les principaux PAE comprennent les polymères piézoélectriques, les actionneurs diélectriques (DEAs), les élastomères de greffe électrostrictifs, les élastomères à cristaux liquides (LCE) et les polymères ferroélectriques. Bien que ces PAE puissent être courbés, leurs faibles capacités de couple limitent actuellement leur utilité en tant que muscles artificiels. De plus, sans matériel standard accepté pour la création de dispositifs EAP, la commercialisation n’est toujours pas pratique. Cependant, la technologie du PAE a considérablement progressé depuis les années 90.
Actionnement à base d’ions
Les PAE ioniques sont des polymères qui peuvent être activés par la diffusion d’ions dans une solution d’électrolyte (en plus de l’application de champs électriques). Les exemples actuels de polymères électroactifs ioniques comprennent les gels de polyélectrodes, les composites polymères polymères ionomères (IPMC), les polymères conducteurs et les fluides électrorhéologiques (ERF). En 2011, il a été démontré que les nanotubes de carbone torsadés pouvaient également être actionnés en appliquant un champ électrique.
Actionnement électrique
Les muscles polymères torsadés et enroulés (TCP), également appelés polymères super enroulés (SCP), sont des polymères enroulés qui peuvent être actionnés par énergie électrique. Un muscle TCP ressemble à un ressort hélicoïdal. Les muscles TCP sont généralement fabriqués à partir de nylon enduit d’argent. Le muscle TCP peut également être fabriqué à partir d’autres couches de conductance électrique telles que l’or. Les muscles TCP doivent être sous une charge pour maintenir le muscle étendu. L’énergie électrique se transforme en énergie thermique en raison de la résistance électrique, également appelée chauffage par effet Joule, par chauffage ohmique et par chauffage par résistance. À mesure que la température du muscle TCP augmente sous l’effet de la chaleur en Joule, le polymère se contracte et provoque la contraction musculaire.
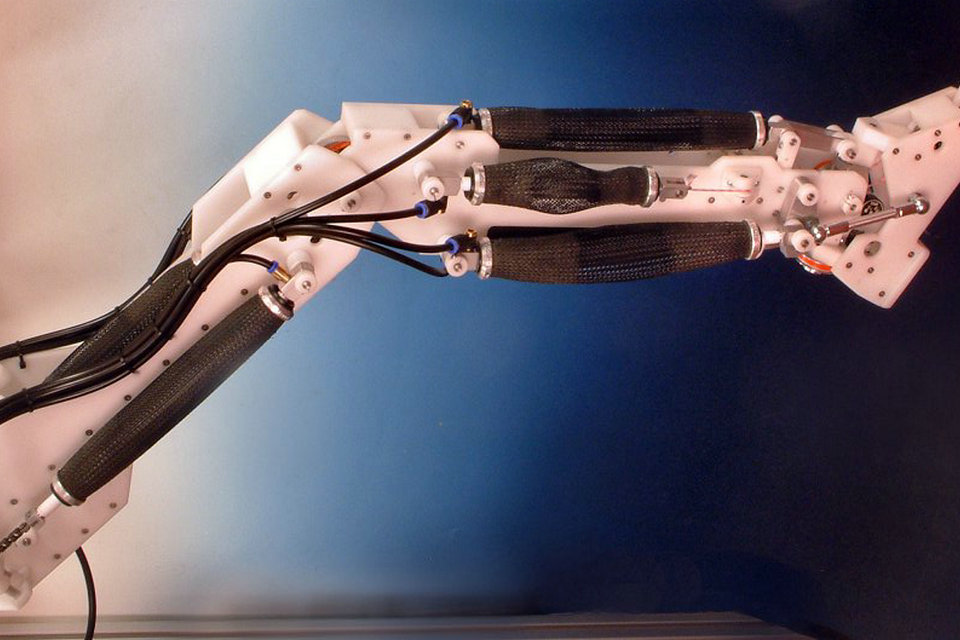
Actionnement pneumatique
Les muscles artificiels pneumatiques (PAM) fonctionnent en remplissant une vessie pneumatique avec de l’air sous pression. Lorsque vous exercez une pression de gaz sur la vessie, une expansion de volume isotrope se produit, mais elle est confinée par des fils tressés qui entourent la vessie, traduisant l’extension du volume en une contraction linéaire le long de l’axe de l’actionneur. Les PAM peuvent être classés en fonction de leur fonctionnement et de leur conception. à savoir, les PAMs comprennent les opérations pneumatiques ou hydrauliques, les opérations sous pression ou sous pression, les membranes tressées / en filet ou noyées et les membranes d’étirage ou de réarrangement. Parmi les PAM les plus couramment utilisés à l’heure actuelle, on trouve un muscle tressé de manière cylindrique, connu sous le nom de «muscle de McKibben», qui a été développé pour la première fois par JL McKibben dans les années 1950.
Actionnement thermique
Fil de pêche
Les muscles artificiels construits à partir de lignes de pêche et de fils à coudre ordinaires peuvent soulever 100 fois plus de poids et générer 100 fois plus de puissance qu’un muscle humain de même longueur et de même poids.
Les muscles artificiels basés sur la ligne de pêche coûtent déjà des ordres de grandeur moins chers (par livre) que les fils en alliage à mémoire de forme ou en nanotubes de carbone; mais ont actuellement une efficacité relativement faible.
Les macromolécules individuelles sont alignées avec la fibre dans des fibres de polymère disponibles dans le commerce. En les enroulant en bobines, les chercheurs créent des muscles artificiels qui se contractent à une vitesse similaire à celle des muscles humains.
Une fibre polymère (non torsadée), telle qu’une ligne de pêche en polyéthylène ou un fil à coudre en nylon, se raccourcit lorsqu’elle est chauffée, jusqu’à environ 4% pour une augmentation de température de 250 K. En torsadant la fibre et en enroulant la fibre torsadée en une bobine, le chauffage provoque le resserrement et la réduction de la bobine jusqu’à 49%. Les chercheurs ont trouvé un autre moyen d’enrouler la bobine de telle sorte que le chauffage l’allonge de 69%.
Une des applications des muscles artificiels activés thermiquement consiste à ouvrir et à fermer automatiquement les fenêtres, en réagissant à la température sans utiliser d’énergie.
De minuscules muscles artificiels composés de nanotubes de carbone torsadés remplis de paraffine sont 200 fois plus puissants que les muscles humains.
Alliages à mémoire de forme
Les alliages à mémoire de forme (SMA), les élastomères à cristaux liquides et les alliages métalliques qui peuvent se déformer puis retrouver leur forme initiale lorsqu’ils sont exposés à la chaleur peuvent fonctionner comme des muscles artificiels. Les muscles artificiels à base d’actionneurs thermiques offrent une résistance à la chaleur, une résistance aux impacts, une densité faible, une résistance à la fatigue élevée et une génération de force importante lors des changements de forme. En 2012, une nouvelle classe de muscles artificiels activés par champ et sans électrolyte, appelés « actionneurs à fil torsadé », a été démontrée, basée sur la dilatation thermique d’un matériau secondaire dans la structure torsadée conductrice du muscle. Il a également été démontré qu’un ruban enroulé en dioxyde de vanadium pouvait se tordre et se détordre à une vitesse de torsion maximale de 200 000 tr / min.
Muscle artificiel utilisant un polymère
Polymère réactif électrique (version anglaise) (Polymères électroactifs: EAP)
Film polymère conducteur ionique (ICPF: film polymère conducteur ionique)
En 1991, il a été inventé par Keisuke Oguchi (Institut de recherche en technologie industrielle d’Osaka, Institut national des sciences et technologies industrielles avancées, anciennement AIST) et d’autres.
Métal noble (or, platine) plaqué sans électrolyte sur les deux faces d’un film d’acide perfluoro sulfonique (PFS) et se pliant à grande vitesse lorsque la tension est appliquée aux deux électrodes latérales.
Muscle artificiel utilisant la pression pneumatique
Muscles artificiels pneumatiques (PAMs)
Type de McKibben (muscle artificiel)
En 1961, il a été développé par Joseph McKibben.
Il a la forme d’un tube en caoutchouc recouvert de fibre de nylon et se contracte en appliquant de l’air comprimé à l’intérieur.
Robot Origami – développé par le laboratoire d’informatique et d’intelligence artificielle du MIT (CSAIL). Muscle artificiel combinant structure origami et emballage sous vide. En retirant l’air à l’intérieur de l’emballage sous vide, le papier pliant intérieur se déforme également de manière imbriquée et devient un squelette.
Muscles artificiels utilisant l’électricité et le magnétisme
Utilisation de fluide électrorhéologique
Utilisation d’un fluide magnétique visqueux (fluide magnétorhéologique)
Utilisation de l’attraction électrostatique
Un actionneur utilisant une force électrostatique, tel qu’un « moteur électrostatique à haute puissance » en cours de recherche et développement par le laboratoire Higuchi • Yamamoto de l’Université de Tokyo, peut également être appliqué comme muscle artificiel. Vidéos de polymères électroactifs en action
Fibre musculaire NTC
Un muscle artificiel structuré pour se contracter en ajoutant une tension d’environ 5 kV à un nanotube de carbone traité a été développé à l’institut de recherche en nanotechnologie de l’université du Texas à Dallas. Le muscle artificiel a une densité légèrement supérieure à celle de l’air, un taux de contraction rapide et une puissance 30 fois supérieure par surface qu’un muscle biologique. (Notez que ce n’est pas particulièrement fort comparé à d’autres muscles artificiels que trente fois le muscle du corps.
Systèmes de contrôle
Les trois types de muscles artificiels ont des contraintes différentes qui affectent le type de système de contrôle dont ils ont besoin pour l’actionnement. Cependant, il est important de noter que les systèmes de commande sont souvent conçus pour répondre aux spécifications d’une expérience donnée, certaines expériences nécessitant l’utilisation combinée d’une variété d’actionneurs différents ou d’un schéma de commande hybride. En tant que tels, les exemples suivants ne doivent pas être traités comme une liste exhaustive de la variété de systèmes de contrôle pouvant être utilisés pour activer un muscle artificiel donné.
Contrôle de la tension
Les muscles en polymère torsadé et enroulé (TCP) peuvent être modélisés par des espaces d’états linéaires invariants dans le premier ordre lorsque l’entrée est une tension électrique, avec une précision supérieure à 85%. Par conséquent, les muscles TCP peuvent être facilement contrôlés par un contrôleur PID numérique. Un contrôleur flou peut être utilisé pour accélérer le contrôleur PID.
Contrôle EAP
Les PAE offrent un poids inférieur, une réponse plus rapide, une densité de puissance plus élevée et un fonctionnement plus silencieux par rapport aux actionneurs traditionnels. Les EAP électriques et ioniques sont principalement actionnés à l’aide de boucles de contrôle à rétroaction, mieux connues sous le nom de systèmes de contrôle à boucle fermée.
Contrôle pneumatique
Il existe actuellement deux types de muscles artificiels pneumatiques (PAM). Le premier type a une vessie simple entourée d’un manchon tressé et le second type a une double vessie.
Simple vessie entourée d’une manche tressée
Les muscles artificiels pneumatiques, bien que légers et peu coûteux, posent un problème de contrôle particulièrement difficile car ils sont fortement non linéaires et ont des propriétés, telles que la température, qui fluctuent considérablement avec le temps. Les PAM sont généralement constitués de composants en caoutchouc et en plastique. Au fur et à mesure que ces pièces entrent en contact les unes avec les autres lors de l’actionnement, la température du PAM augmente, entraînant en définitive des modifications permanentes de la structure du muscle artificiel au fil du temps. Ce problème a conduit à diverses approches expérimentales. En résumé (fournis par Ahn et al.), Les systèmes de contrôle expérimentaux viables comprennent le contrôle PID, le contrôle adaptatif (Lilly, 2003), le contrôle prédictif optimal non linéaire (Reynolds et al., 2003), le contrôle à structure variable (Repperger et al., 1998). Medrano-Cerda et al., 1995), planification du gain (Repperger et al., 1999) et diverses approches d’informatique douce, notamment le contrôle par algorithme d’entraînement par réseau neuronal de Kohonen (Hesselroth et al., 1994), le contrôle par réseau neuronal / PID non linéaire ( Ahn et Thanh, 2005) et le contrôle neuro-flou / génétique (Chan et al., 2003; Lilly et al., 2003).
Les problèmes de contrôle concernant les systèmes hautement non linéaires ont généralement été résolus par une approche empirique au moyen de laquelle des « modèles flous » (Chan et al., 2003) des capacités comportementales du système pourraient être mis au jour (à partir des résultats expérimentaux du système spécifique). testée) par un expert humain compétent. Cependant, certaines recherches ont utilisé des « données réelles » (Nelles O., 2000) pour déterminer la précision d’un modèle flou donné tout en évitant les complexités mathématiques des modèles précédents. L’expérience d’Ahn et al. Est simplement un exemple d’expériences récentes qui utilisent des algorithmes génétiques modifiés (MGA) pour former des modèles flous à l’aide de données d’entrée-sortie expérimentales provenant d’un bras de robot PAM.
Double vessie
Cet actionneur consiste en une membrane externe avec une membrane interne flexible divisant l’intérieur du muscle en deux parties. Un tendon est fixé à la membrane et sort du muscle à travers un manchon afin que le tendon puisse se contracter dans le muscle. Un tube permet à l’air d’entrer dans la vessie interne, qui s’enroule ensuite dans la vessie externe. Un avantage clé de ce type de muscle pneumatique est qu’il n’ya pas de mouvement potentiellement frictif de la vessie contre un manchon extérieur.
Contrôle thermique
Les muscles artificiels SMA, bien que légers et utiles dans les applications nécessitant une force et un déplacement importants, présentent également des défis de contrôle spécifiques; à savoir, les muscles artificiels SMA sont limités par leurs relations hystérétiques entrée-sortie et leurs limites de bande passante. Comme Wen et al. Nous en discuterons, le phénomène de transformation de phase SMA est « hystérétique » en ce que le brin SMA de sortie résultant dépend de l’historique de son apport de chaleur. En ce qui concerne les limitations de bande passante, la réponse dynamique d’un actionneur SMA lors des transformations de phase hystérétiques est très lente en raison du temps requis pour que la chaleur soit transférée au muscle artificiel SMA. Très peu de recherches ont été menées sur le contrôle SMA en raison d’hypothèses qui considèrent les applications SMA comme des dispositifs statiques; néanmoins, diverses approches de contrôle ont été testées pour résoudre le problème de contrôle de la non-linéarité hystérétique.
En règle générale, ce problème a nécessité l’application de la compensation en boucle ouverte ou du contrôle du retour en boucle fermée. En ce qui concerne le contrôle en boucle ouverte, le modèle de Preisach a souvent été utilisé pour sa structure simple et sa capacité à simuler et à contrôler facilement (Hughes et Wen, 1995). En ce qui concerne le contrôle en boucle fermée, une approche basée sur la passivité analysant la stabilité en boucle fermée SMA a été utilisée (Madill et Wen, 1994). L’étude de Wen et al. Fournit un autre exemple de contrôle par rétroaction en boucle fermée, démontrant la stabilité du contrôle en boucle fermée dans les applications SMA en appliquant une combinaison de contrôle de rétroaction de force et de contrôle de position sur une poutre en aluminium flexible actionnée par un SMA fabriqué à partir de Nitinol.
Applications
Les technologies du muscle artificiel ont de nombreuses applications potentielles dans les machines biomimétiques, notamment les robots, les actionneurs industriels et les exosquelettes motorisés. Les muscles artificiels basés sur l’EAP combinent légèreté, faible consommation d’énergie, résilience et agilité pour la locomotion et la manipulation. Les futurs dispositifs EAP auront des applications dans l’aérospatiale, l’industrie automobile, la médecine, la robotique, les mécanismes d’articulation, le divertissement, l’animation, les jouets, les vêtements, les interfaces tactiles et tactiles, le contrôle du bruit, les transducteurs, les générateurs de puissance et les structures intelligentes.
Les muscles artificiels pneumatiques offrent également une flexibilité, une contrôlabilité et une légèreté supérieures à celles des vérins pneumatiques classiques. La plupart des applications de PAM impliquent l’utilisation de muscles de type McKibben. Les actionneurs thermiques tels que les SMA ont diverses applications militaires, médicales, de sécurité et robotiques, et pourraient en outre être utilisés pour générer de l’énergie par le biais de changements de forme mécaniques.