शून्य पल बिंदु

शून्य पल बिंदु एक गतिशीलता है जो गतिशील लोकेशन के गतिशीलता और नियंत्रण से संबंधित है, उदाहरण के लिए, humanoid रोबोट के लिए। यह बिंदु के साथ पैर के संपर्क में गतिशील प्रतिक्रिया बल के संबंध में बिंदु निर्दिष्ट करता है क्षैतिज दिशा में किसी भी क्षण का उत्पादन नहीं करता है, यानी वह बिंदु जहां क्षैतिज जड़ता और गुरुत्वाकर्षण बल कुल शून्य (शून्य) के बराबर होता है। अवधारणा मानती है कि संपर्क क्षेत्र प्लानर है और पैर को स्लाइडिंग से रखने के लिए पर्याप्त उच्च घर्षण है।
परिचय
इस अवधारणा को जनवरी 1 9 68 में मॉस्को में सैद्धांतिक और एप्लाइड मैकेनिक्स की थर्ड ऑल-यूनियन कांग्रेस में मिओमिर वोकोब्राटोविक द्वारा पेश किया गया था। 1 9 70 और 1 9 72 के बीच बनाए गए निम्नलिखित कार्यों और कागजात में इसे शून्य पल बिंदु कहा जाएगा और दुनिया भर में फैल जाएगा।
शून्य पल बिंदु द्विपक्षीय रोबोट के लिए गति योजना में एक बहुत ही महत्वपूर्ण अवधारणा है। चूंकि उनके पास फर्श के संपर्क के केवल दो बिंदु हैं और उन्हें चलना है, “रन” या “कूद” (गति संदर्भ में), उनके गति को अपने पूरे शरीर की गतिशील स्थिरता से संबंधित योजना बनाई जानी चाहिए। यह एक आसान काम नहीं है, विशेष रूप से क्योंकि रोबोट (धड़) के ऊपरी शरीर में पैरों की तुलना में बड़े द्रव्यमान और जड़त्व होते हैं जो रोबोट को समर्थन और स्थानांतरित करने के लिए माना जाता है। इसकी तुलना एक उल्टा पेंडुलम को संतुलित करने की समस्या से की जा सकती है।
एक चलने वाले रोबोट के प्रक्षेपवक्र को कोणीय गति समीकरण का उपयोग करके योजनाबद्ध किया जाता है ताकि यह सुनिश्चित किया जा सके कि जेनरेट किए गए संयुक्त ट्रैजेक्टोर रोबोट की गतिशील स्थलीय स्थिरता की गारंटी देते हैं, जिसे आमतौर पर एक पूर्वनिर्धारित स्थिरता क्षेत्र की सीमाओं में शून्य पल बिंदु की दूरी से प्रमाणित किया जाता है। शून्य पल बिंदु की स्थिति संदर्भित द्रव्यमान और रोबोट के धड़ के जड़त्व से प्रभावित होती है, क्योंकि इसकी गति को आम तौर पर एक संतोषजनक गतिशील स्थलीय स्थिरता बनाए रखने के लिए बड़े एंकल टॉर्क की आवश्यकता होती है।
इस समस्या को हल करने के लिए एक दृष्टिकोण रोबोट की मुद्रा को स्थिर करने के लिए छोटे ट्रंक मोशनों का उपयोग करने में होता है। हालांकि, पैरों के लिंक के ट्रैजेक्टोरियों को इस तरह से परिभाषित करने के लिए कुछ नई योजना विधियां विकसित की जा रही हैं कि रोबोट का धड़ स्वाभाविक रूप से अपनी गति को भरने के लिए आवश्यक टखने के टोक़ को कम करने के लिए चलाया जाता है। यदि पैर लिंक के लिए प्रक्षेपण योजना अच्छी तरह से सफल हो जाती है, तो शून्य पल बिंदु पूर्वनिर्धारित स्थिरता क्षेत्र से बाहर नहीं निकल जाएगा और रोबोट की गति एक प्राकृतिक प्रक्षेपवक्र की नकल करने के लिए चिकनी हो जाएगी।
जेडएमपी गणना
एक द्विपक्षीय रोबोट पर कार्यरत जड़त्व और गुरुत्वाकर्षण बल की परिणामी शक्ति सूत्र द्वारा व्यक्त की जाती है:

कहा पे
किसी भी समय पल
कहा पे
द्विपक्षीय रोबोट की वैश्विक गति के न्यूटन-यूलर समीकरणों को इस प्रकार लिखा जा सकता है:
कहा पे
न्यूटन-यूलर समीकरणों को फिर से लिखा जा सकता है:
इसलिए यह देखना आसान है कि हमारे पास है:
इन समीकरणों से पता चलता है कि यदि संपर्क बलों और जड़त्व और गुरुत्वाकर्षण बल सख्ती से विपरीत हैं तो द्विपक्षीय रोबोट गतिशील रूप से संतुलित होता है।
यदि एक अक्ष है
साथ में
कहा पे
गुरुत्वाकर्षण और जड़ता बलों और संपर्क बलों के बीच विपक्ष के कारण, {\ displaystyle Z}
कहा पे
अवधारणा का इतिहास
जेडएमपी की धारणा पहली बार जनवरी 1 9 68 में मास्को में आयोजित सैद्धांतिक और एप्लाइड मैकेनिक्स के लिए यूनियन की तीसरी कांग्रेस में मिओमिर वोकोब्रातोविच द्वारा पेश की गई थी। “शून्य पल बिंदु” शब्द प्रकाशित कार्यों में दिखाई दिया। अगले वर्षों के दौरान।
जेडएमपी में दिलचस्पी 1 99 0 के दशक में बंद हुई, जब रोबोटिस्ट्स ने इसे द्विपक्षीय चलने के लिए कानूनों को नियंत्रित करने के लिए सफलतापूर्वक लागू किया। इन घटनाओं को अनुमति देने वाला मौलिक मॉडल उलटा पेंडुलम है: ऊपरी शरीर में पैरों की तुलना में द्रव्यमान होता है, चलने से पहले उल्टा पेंडुलम के आंदोलन के लिए अनुमान लगाया जाता है, जो कि मोबाइल बेस से जुड़े हुए द्रव्यमान को कहता है शून्य द्रव्यमान की एक छड़ी (मॉडल “कार्ट”)। सवाल में द्रव्यमान रोबोट की गुरुत्वाकर्षण के केंद्र का प्रतिनिधित्व करता है, रॉड इसका समर्थन पैर है, और मोबाइल बेस पॉइंट जेडएमपी के अलावा कोई नहीं है। यह मॉडल सफलतापूर्वक एचआरपी -2 और एचआरपी -4 सी रोबोट पर लागू किया गया था।] जहां गुरुत्वाकर्षण का केंद्र निरंतर ऊंचाई पर बना रहता है।
दबाव केंद्र से लिंक करें
दबाव का केंद्र एक संपर्क की एक गतिशील बिंदु विशेषता है। जेडएमपी के विपरीत, जिसे रोबोट के सभी त्वरणों के अनुसार परिभाषित किया गया है, सीओपी एक संपर्क की सतह पर लगाए गए बलों से परिभाषित स्थानीय मात्रा है।हालांकि, जब केवल एक संपर्क होता है, या रोबोट क्षैतिज जमीन पर चल रहा है, तो सीओपी और जेडएमपी मेल खाता है।
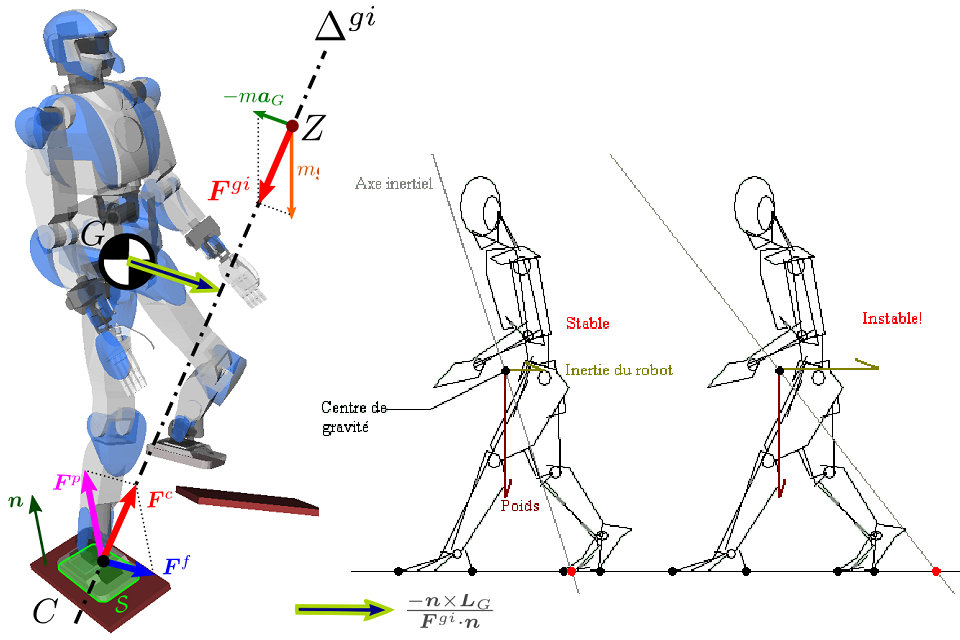
दाईं ओर की आकृति गुरुत्वाकर्षण के केंद्र का प्रतिनिधित्व करती है
फ्लैट जमीन का विशेष मामला
जब तक सतह के साथ संपर्क टूट नहीं जाता है, तब तक दबाव का केंद्र रोबोट और पर्यावरण के बीच संपर्क सतह के अंदर रहता है। जब रोबोट के दो फीट एक ही सतह (जमीन) के संपर्क में होते हैं, तो उत्थान की यह सतह
गैर-झुकाव मानदंड: झुकाव मुक्त संचालन के दौरान, जेडएमपी लिफ्ट सतह के भीतर स्थित है, जिसे फुलक्रम्स के उत्तल ढक्कन के रूप में परिभाषित किया गया है।
यह मानदंड अक्सर फ्लैट जमीन पर humanoid रोबोटों के चलने के लिए प्रयोग किया जाता है।
अनुप्रयोगों
शून्य पल बिंदु को एक मीट्रिक के रूप में प्रस्तावित किया गया है जिसका प्रयोग रैंपों और बाधाओं को नेविगेट करते समय iRobot PackBot जैसे रोबोटों पर टिपने के खिलाफ स्थिरता का आकलन करने के लिए किया जा सकता है।