
نقطة الصفر الحرجة هي مفهوم مرتبط بالديناميكيات والتحكم في حركة الأرجل ، على سبيل المثال ، بالنسبة إلى الروبوتات البشرية. وهو يحدد النقطة فيما يتعلق بقوة الحركة الديناميكية عند ملامسة القدم مع الأرض ولا ينتج أي لحظة في الاتجاه الأفقي ، أي النقطة التي يكون فيها مجموع الجمود الأفقي وقوى الجاذبية تساوي 0 (صفر). يفترض المفهوم أن منطقة التماس مستوية ولها احتكاك عالي بما فيه الكفاية للحفاظ على انزلاق القدمين.
المقدمة
تم تقديم هذا المفهوم في يناير 1968 من قبل Miomir Vukobratović في المؤتمر الثالث لجميع الاتحاد من الميكانيكا النظرية والتطبيقية في موسكو. في الأعمال والأوراق التالية التي تم إنتاجها بين عامي 1970 و 1972 ، كان يُطلق عليها نقطة حظة ولن تنتشر في جميع أنحاء العالم.
نقطة الصفر هي مفهوم مهم للغاية في التخطيط للحركة للإنسان الآلي ذي القدمين. بما أنه ليس لديهم سوى نقطتي اتصال مع الأرضية ومن المفترض أن يسيروا ، “يركضون” أو “قفزة” (في سياق الحركة) ، يجب التخطيط لحركتهم فيما يتعلق بالاستقرار الديناميكي لجسمهم بالكامل.هذه ليست مهمة سهلة ، لا سيما لأن الجزء العلوي من الروبوت (الجذع) لديه كتلة أكبر والقصور الذاتي من الساقين التي من المفترض أن تدعم وتحريك الروبوت. ويمكن مقارنة ذلك بمشكلة توازن بندول مقلوب.
يتم تخطيط مسار روبوت المشي باستخدام معادلة الزخم الزاوي لضمان أن المسارات المشتركة الناتجة تضمن الثبات الوضعي الديناميكي للروبوت ، والذي يتم قياسه عادة عن طريق مسافة نقطة الصفر في حدود منطقة الاستقرار المحددة مسبقًا. يتأثر موضع نقطة الصفر الدقيقة بالكتلة المشار إليها والجمود في جسم الروبوت ، حيث تتطلب الحركة عمومًا عزم دوران كاحل كبير للحفاظ على استقرار موضعي ديناميكي مرضٍ.
نهج واحد لحل هذه المشكلة يتمثل في استخدام حركات الجذع الصغيرة لتحقيق الاستقرار في الموقف من الروبوت. ومع ذلك ، يتم تطوير بعض طرق التخطيط الجديدة لتحديد مسارات روابط الأرجل بطريقة يتم بها توجيه الجذع للروبوت بشكل طبيعي من أجل تقليل عزم الكاحل اللازم لتعويض حركته. إذا نجح تخطيط المسار لوصلات الساق ، فعندئذ لن تنتقل نقطة الصفر من منطقة الاستقرار المحددة سلفًا وستصبح حركة الروبوت أكثر سلاسة ، مما يحاكي مسارًا طبيعيًا.
حساب ZMP
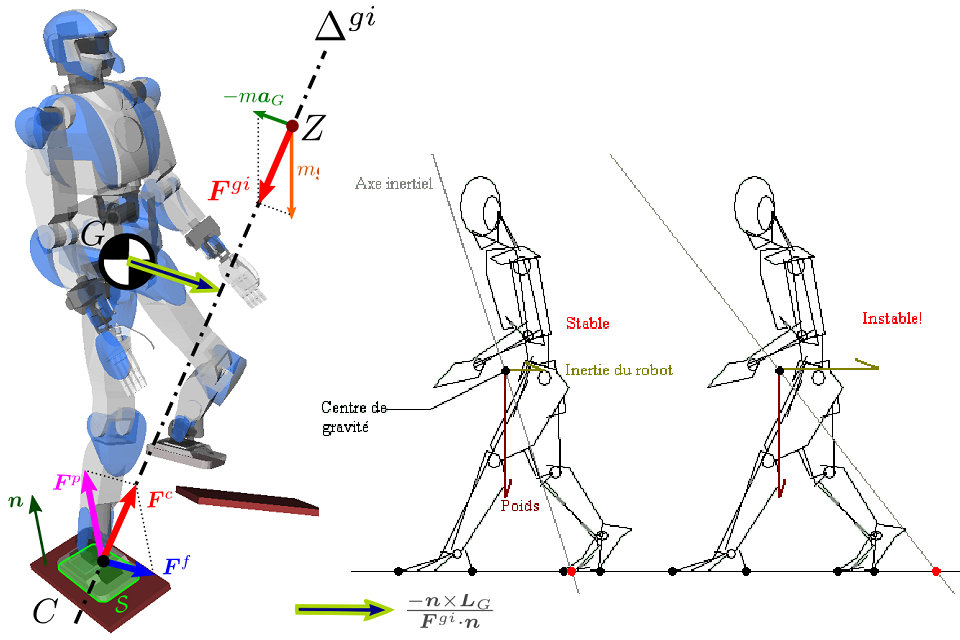
يتم التعبير عن القوة الناتجة من الجمود وقوى الجاذبية التي تعمل على روبوت ذي قدمين بواسطة الصيغة:

أين
اللحظة في أي لحظة
أين
يمكن كتابة معادلات نيوتن-اويلر للحركة العالمية للروبوت ذي القدمين على النحو التالي:
أين
يمكن إعادة كتابة معادلات نيوتن-اويلر على النحو التالي:
لذلك من الأسهل أن نرى أن لدينا:
تظهر هذه المعادلات أن الروبوت ذي القدمين متوازن ديناميكيًا إذا كانت قوى الاتصال وقوى الجاذبية والجمود متضادتين تمامًا.
إذا كان المحور
مع
أين
بسبب المعارضة بين قوى الجاذبية والجمود وقوى الاتصال المذكورة من قبل ، فإن {\ displaystyle Z}
أين
تاريخ المفهوم
تم تقديم فكرة ZMP لأول مرة من قبل Miomir Vukobratović في المؤتمر الثالث للاتحاد من أجل الميكانيكا النظرية والتطبيقية الذي عقد في موسكو في يناير 1968. ظهر مصطلح “نقطة الصفر لحظة” في الأعمال المنشورة. خلال السنوات التالية.
انطلق الاهتمام في ZMP في التسعينات ، عندما طبق الروبوتون بنجاح ذلك للسيطرة على قوانين المشي بالقدمين. والنموذج الأساسي الذي سمح لهذه التطورات هو نموذج البندول المقلوب: الجزء الأعلى من الجسم الذي له كتلة أكبر من الأرجل ، ويتكون المشي في أول تقدير لحركة بندول مقلوب ، أي كتلة متصلة إلى قاعدة متحركة بواسطة قضيب من كتلة صفر (نموذج “كارت”). تمثل الكتلة المعنية مركز ثقل الروبوت ، قضيب دعم القضيب ، ونقطة الهاتف المحمول ليست سوى ZMP. تم تطبيق هذا النموذج بنجاح على روبوتات HRP-2 1 و HRP-4C.] حيث لا يزال مركز الثقل عند ارتفاع ثابت.
اربط بمركز الضغط
يعتبر مركز الضغط خاصية مميزة لجهة الاتصال. بخلاف ZMP ، والذي يتم تعريفه وفقًا لكل تسارعات الروبوت ، فإن COP عبارة عن كمية محلية محددة من القوى التي تمارس على سطح جهة الاتصال. ومع ذلك ، عندما يكون هناك جهة اتصال واحدة فقط ، أو أن الروبوت يسير على الأرض الأفقية ، يتزامن COP و ZMP.
الرقم على اليمين يمثل مركز الثقل
حالة خاصة من أرض مستوية
طالما لا ينكسر التلامس مع السطح ، فإن مركز الضغط موجود بالضرورة داخل سطح التلامس بين الروبوت والبيئة. عندما يكون رجلي القدمين على اتصال بنفس السطح (الأرض) ، هذا السطح من الإرتفاع
معيار عدم الميل: أثناء التشغيل خالٍ من الإمالة ، يقع ZMP داخل سطح الرفع ، ويتم تعريفه على أنه بدن محدب في نقطة ارتكاز.
يستخدم هذا المعيار بشكل متكرر لمشي الروبوتات على أرضية مسطحة.
تطبيقات
تم اقتراح نقطة عزم الصفر صفر كمقياس يمكن استخدامه لتقييم الاستقرار في مقابل الروبوتات مثل iRobot PackBot عند التنقل في المنحدرات والعقبات.