रोबोट प्रतिमान

रोबोटिक्स में, रोबोट प्रतिमान एक मानसिक मॉडल है कि रोबोट कैसे काम करता है। रोबोटिक्स के तीन प्राइमेटिव्स के बीच संबंधों द्वारा एक रोबोट प्रतिमान का वर्णन किया जा सकता है: सेंस प्लान एक्ट। यह भी वर्णन किया जा सकता है कि सिस्टम के माध्यम से संवेदी डेटा संसाधित और वितरित किया जाता है, और जहां निर्णय किए जाते हैं।
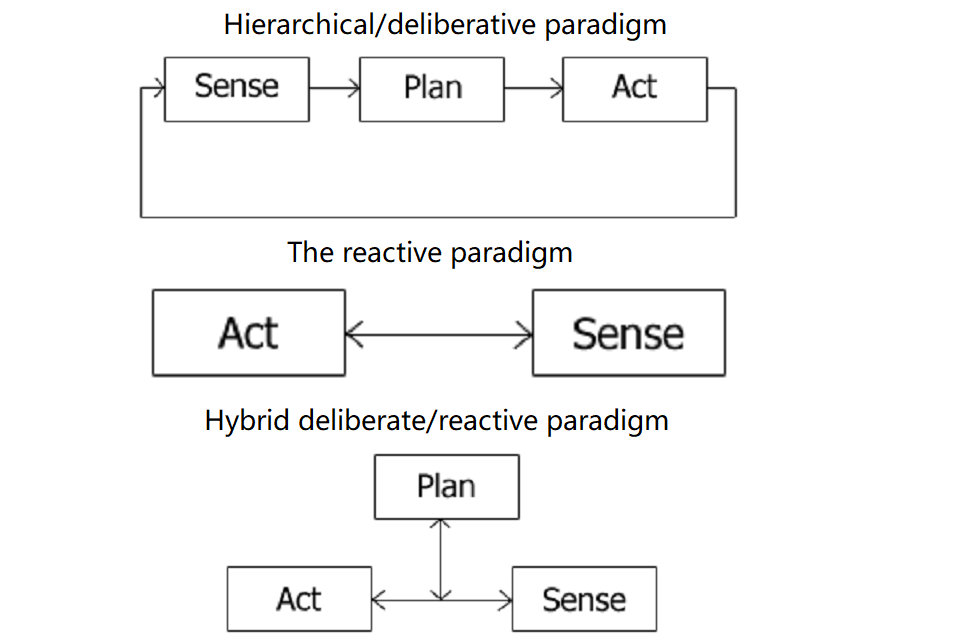
पदानुक्रमित / विचारशील प्रतिमान
रोबोट एक शीर्ष-डाउन फैशन में काम करता है, जो योजना पर भारी है।
रोबोट दुनिया को महसूस करता है, अगली कार्रवाई की योजना बनाता है, कार्य करता है; प्रत्येक चरण में रोबोट स्पष्ट रूप से अगले कदम की योजना बना रहा है।
सभी संवेदन डेटा एक वैश्विक विश्व मॉडल में इकट्ठा होते हैं।
प्रतिक्रियाशील प्रतिमान
संगठन के सेंस-एक्ट प्रकार।
रोबोट में सेंस-एक्ट कपलिंग के कई उदाहरण हैं।
ये युग्मन समवर्ती प्रक्रियाएं हैं, जिन्हें व्यवहार कहा जाता है, जो स्थानीय संवेदन डेटा लेते हैं और अन्य प्रक्रियाओं के स्वतंत्र रूप से लेने के लिए सर्वोत्तम कार्रवाई की गणना करते हैं।
रोबोट व्यवहार का संयोजन करेगा।
हाइब्रिड जानबूझकर / प्रतिक्रियाशील प्रतिमान
रोबोट पहली योजना (विचार-विमर्श) करता है कि उप-कार्य (जिसे “मिशन प्लानिंग” भी कहा जाता है) में किसी कार्य को सबसे अच्छा तरीके से विघटित करना है और फिर प्रत्येक उपटस्क को पूरा करने के लिए उपयुक्त व्यवहार क्या हैं।
फिर व्यवहार प्रतिक्रियाशील प्रतिमान के अनुसार निष्पादन शुरू होता है।
सेंसिंग संगठन भी श्रेणीबद्ध और प्रतिक्रियाशील शैलियों का मिश्रण है; सेंसर डेटा प्रत्येक व्यवहार को जाता है जिसे उस सेंसर की आवश्यकता होती है, लेकिन कार्य-उन्मुख वैश्विक विश्व मॉडल के निर्माण के लिए योजनाकार के लिए भी उपलब्ध है।