
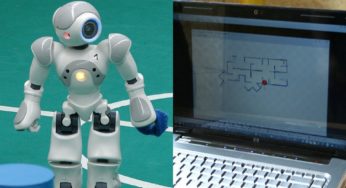
Roboter-Mapping
Roboter-Mapping ist eine kartografische Disziplin. Das Ziel eines autonomen Roboters ist es, eine Karte (Außeneinsatz) oder einen Grundrissplan (Inneneinsatz) erstellen…
Passive Dynamik
Passivdynamik bezieht sich auf das dynamische Verhalten von Aktuatoren, Robotern oder Organismen, wenn keine Energie aus einem Vorrat (z. B.…
Nullmomentpunkt
Der Null-Moment-Punkt ist ein Konzept, das mit der Dynamik und Kontrolle der Beinbewegung in Verbindung steht, z. B. für humanoide…
Sphärischer Roboter
Ein sphärischer Roboter, auch als sphärischer mobiler Roboter oder kugelförmiger Roboter bezeichnet, ist ein mobiler Roboter mit sphärischer Außenform. Ein…
Elektrisches Einrad
Ein elektrisches Einrad ist ein selbstausgleichender Personentransporter mit einem einzigen Rad. Der Fahrer steuert die Geschwindigkeit, indem er sich vorwärts…
Mobiler Roboter
Ein mobiler Roboter ist ein Roboter, der sich fortbewegen kann. Mobile Robotik wird in der Regel als Untergebiet der Robotik und…
Roboterbewegung
Roboterbewegung ist die Sammelbezeichnung für die verschiedenen Methoden, mit denen sich Roboter von Ort zu Ort bewegen. Roboter mit Rädern…
Mobiler Manipulator
Mobiler Manipulator ist heutzutage ein weit verbreiteter Begriff für Robotersysteme, die aus einem Roboter-Manipulatorarm aufgebaut sind, der auf einer mobilen…
Bildverarbeitungseinheit
Eine Vision Processing Unit (VPU) ist eine aufstrebende Klasse von Mikroprozessoren; Es handelt sich dabei um eine spezielle Art von…
Taktiler Sensor
Ein taktiler Sensor ist ein Gerät, das Informationen misst, die durch physikalische Interaktion mit seiner Umgebung entstehen. Taktile Sensoren werden…