제로 순간 지점은 인간형 로봇과 같은 다리 운동의 역 동성 및 제어와 관련된 개념입니다. 이것은 발의지면과의 접촉에서의 동적 반력이 수평 방향에서 어떤 모멘트도 일으키지 않는 점, 즉 수평 관성 및 중력의 합계가 0 (영)과 같은 점을 지정합니다. 이 개념은 접촉 영역이 평평하고 다리가 미끄러지지 않도록 충분히 높은 마찰을 가지고 있다고 가정합니다.
소개
이 개념은 1968 년 1 월 Miomir Vukobratović에 의해 모스크바의 이론 및 응용 역학 제 3 회 총회에서 발표되었습니다. 1970 년에서 1972 년 사이에 제작 된 다음 작품들과 논문들에서 그것은 순간적으로 0 점이라고 불릴 것이고 전 세계에 퍼질 것이다.
제로 점은 바이 페드 로봇의 모션 계획에서 매우 중요한 개념입니다. 그들은 바닥과 접촉하는 지점이 두 개 뿐이며 걷기, 달리기 또는 점프 (동작 컨텍스트에서)로되어 있기 때문에 몸 전체의 동적 안정성과 관련하여 동작을 계획해야합니다. 이것은 쉬운 작업이 아닙니다. 특히 로봇의 상체 (몸통)가 로봇을지지하고 움직이는 다리보다 질량과 관성이 더 큽니다. 이것은 거꾸로 된 진자의 균형을 맞추는 문제와 비교 될 수 있습니다.
보행 로봇의 궤도는 각 운동량 방정식을 사용하여 계획된 안정성 영역의 경계에서 영점 지점의 거리로 정량화 된 로봇의 동적 자세 안정성을 생성 된 관절 궤도가 보장하도록 계획됩니다. 제로 모멘트 점의 위치는 로봇의 몸통의 기준 질량 및 관성에 영향을받습니다. 운동이 일반적으로 만족스러운 역학적 자세 안정성을 유지하기 위해 커다란 발목 토크를 필요로하기 때문입니다.
이 문제를 해결하기위한 한 가지 방법은 작은 몸통 움직임을 사용하여 로봇의 자세를 안정화하는 것입니다. 그러나 다리의 궤적을 정의하기 위해 로봇의 몸통을 자연스럽게 조종하여 로봇의 움직임을 보상하는 데 필요한 발목의 토크를 줄이는 새로운 계획 방법이 개발되고 있습니다. 다리 연결에 대한 궤도 계획이 성공적으로 수행되면 영점 시점이 사전 정의 된 안정성 영역 밖으로 벗어나지 않고 로봇의 동작이 자연스러운 탄도를 모방하여 더 부드럽게됩니다.
ZMP 계산
2 족 로봇에 작용하는 관성 및 중력의 합력은 다음 공식으로 표현됩니다.

어디에 는 로봇의 총 질량, 중력 가속도, 질량의 중심이고 질량 중심의 가속도입니다.
 는 로봇의 총 질량,
는 로봇의 총 질량,  중력 가속도,
중력 가속도,  질량의 중심이고
질량의 중심이고  질량 중심의 가속도입니다.
질량 중심의 가속도입니다.어느 시점에서의 순간 다음과 같이 정의 할 수 있습니다.
 다음과 같이 정의 할 수 있습니다.
다음과 같이 정의 할 수 있습니다.
어디에 질량 중심에서 각운동량의 비율입니다.
이족 로봇의 전역 운동에 대한 Newton-Euler 방정식은 다음과 같이 쓸 수 있습니다.
 질량 중심에서 각운동량의 비율입니다.
질량 중심에서 각운동량의 비율입니다.

어디에 X와 Y에서의 접촉력의 합 어떤 점 X에 대한 접촉력과 관련된 순간이다.
Newton-Euler 방정식은 다음과 같이 재 작성 될 수 있습니다.
 X와 Y에서의 접촉력의 합
X와 Y에서의 접촉력의 합  어떤 점 X에 대한 접촉력과 관련된 순간이다.
어떤 점 X에 대한 접촉력과 관련된 순간이다.

그래서 우리가 가지고있는 것을보기가 더 쉽습니다.


이 방정식은 접촉력과 관성 및 중력이 엄밀하게 반대 인 경우 2 족 보행 로봇이 동적으로 균형을 이룬다는 것을 보여줍니다.
축 여기서, 모멘트는 법선 벡터와 평행하다. 축의 모든 점에 대한 표면으로부터 ZMP (Zero Moment Point)는이 축에 반드시 속합니다. 이는 정의에 따라 벡터 방향으로 향하게되므로 .그러면 ZMP가 축 간의 교차점이됩니다. 및 지상 표면과 같은 :
 여기서, 모멘트는 법선 벡터와 평행하다.
여기서, 모멘트는 법선 벡터와 평행하다.  축의 모든 점에 대한 표면으로부터 ZMP (Zero Moment Point)는이 축에 반드시 속합니다. 이는 정의에 따라 벡터 방향으로 향하게되므로
축의 모든 점에 대한 표면으로부터 ZMP (Zero Moment Point)는이 축에 반드시 속합니다. 이는 정의에 따라 벡터 방향으로 향하게되므로
와


어디에 ZMP를 나타냅니다.
 ZMP를 나타냅니다.
ZMP를 나타냅니다.앞에서 언급 한 중력과 관성력 및 접촉력 사이의 반대 때문에 {\ displaystyle Z} point (ZMP)는 다음과 같이 정의 할 수 있습니다.

어디에 는 접촉면상의 한 지점, 예를 들어 질량 중심의 정상 투영입니다.
 는 접촉면상의 한 지점, 예를 들어 질량 중심의 정상 투영입니다.
는 접촉면상의 한 지점, 예를 들어 질량 중심의 정상 투영입니다.개념의 역사
ZMP의 개념은 1968 년 1 월 모스크바에서 개최 된 이론 및 응용 역학 연합회의 미오 미르 부 코브라 토비치 (Miomir Vukobratović)에 의해 처음 소개되었습니다. “제로 순간 시점 (zero moment point)”이란 용어는 출판 된 저작물에 등장했습니다. 다음 해 동안.
ZMP에 대한 관심은 1990 년대에 로봇 공학자가 2 족 보행 법칙을 성공적으로 적용했을 때부터 시작되었습니다. 이 발달을 허용 한 근본적인 모델은 거꾸로 된 진자의 기본 모델입니다. 상체는 다리보다 큰 질량을 가지며, 걷는 것은 거꾸로 된 진자의 운동에 대한 첫 번째 근사치, 즉 제로 질량의 막대 (모델 “카트”). 문제의 질량은 로봇의 무게 중심을 나타내며로드는지지 다리를 가지며 모바일 기점은 ZMP 이외의 것입니다. 이 모델은 HRP-2 1 및 HRP-4C 로봇에 성공적으로 적용되었습니다.] 무게 중심은 일정한 높이로 유지됩니다.
압력 센터와 연결
압력의 중심은 접점의 동적 점 특성입니다. 로봇의 모든 가속도에 따라 정의 된 ZMP와 달리 COP는 접촉면에 작용하는 힘으로 정의 된 국부적 인 양입니다. 그러나 단 하나의 접촉이 있거나 로봇이 수평지면 위를 걷고있을 때 COP와 ZMP가 일치합니다.
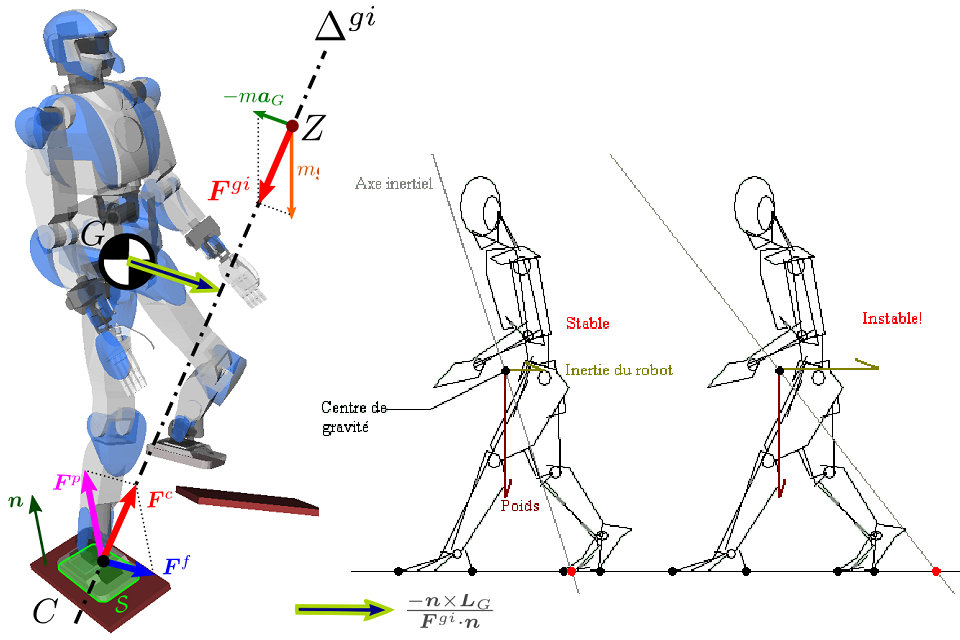
오른쪽 그림은 무게 중심을 나타냅니다. , 발 우측 접촉의 압력 중심 뿐만 아니라 ZMP . 점 관성 축에 항상 정렬된다. . 로봇이 각운동량을 유지하지 않으면 후자는 반드시 무게 중심을 통과하지 않습니다 ( ), 이것은 locomotion에서 일반적인 working hypothesis이다.


평지의 특별한 경우
표면과의 접촉이 끊어지지 않는 한, 압력 중심은 반드시 로봇과 환경 사이의 접촉면 내부에 있습니다.로봇의 두 발이 동일한 표면 (지면)과 접촉 할 때,이 부양 표면 지원의 모든 지점의 볼록한 선체, 즉 “두 발 사이”에 위치한 점 집합입니다. 이 표면은 압력과 마찰을 정의 할 수있게하며, 따라서 관련된 압력 센터를 정의 할 수 있습니다 (자세한 내용은 압력 센터 참조). COP와 ZMP가 일치하면 다음과 같은 기준을 얻습니다.

비 기울임 기준 : 틸트없는 작동 중에 ZMP는 받침대의 볼록한 선체로 정의 된 리프트면 내에 위치합니다.
이 기준은 평지에서 휴머노이드 로봇을 걷는 데 가장 자주 사용됩니다.
응용 프로그램
경사로와 장애물을 항해 할 때 iRobot PackBot과 같은 로봇의 기울어 짐에 대한 안정성을 평가하는 데 사용할 수있는 척도로 제로 점이 제안되었습니다.