Punto di momento zero è un concetto relativo alla dinamica e al controllo della locomozione con gambe, ad esempio per robot umanoidi. Specifica il punto rispetto al quale la forza di reazione dinamica al contatto del piede con il terreno non produce alcun momento nella direzione orizzontale, cioè il punto in cui il totale delle forze di inerzia orizzontale e gravità è uguale a 0 (zero). Il concetto presuppone che l’area di contatto sia planare e abbia un attrito sufficientemente alto da impedire lo scivolamento dei piedi.
introduzione
Questo concetto è stato introdotto nel gennaio 1968 da Miomir Vukobratović al Terzo congresso di tutti i sindacati di meccanica teorica e applicata di Mosca. Nei seguenti lavori e documenti che sono stati prodotti tra il 1970 e il 1972, si sarebbe quindi chiamato punto zero e si sarebbe diffuso in tutto il mondo.
Il punto di momento zero è un concetto molto importante nella pianificazione del movimento per i robot bipedi. Poiché hanno solo due punti di contatto con il pavimento e devono camminare, “correre” o “saltare” (nel contesto del movimento), il loro movimento deve essere pianificato riguardo alla stabilità dinamica di tutto il corpo. Questo non è un compito facile, soprattutto perché la parte superiore del robot (torso) ha massa e inerzia maggiori rispetto alle gambe che dovrebbero supportare e muovere il robot. Questo può essere paragonato al problema del bilanciamento di un pendolo invertito.
La traiettoria di un robot che cammina è pianificata utilizzando l’equazione del momento angolare per garantire che le traiettorie articolari generate garantiscano la stabilità posturale dinamica del robot, che di solito viene quantificata dalla distanza del punto di momento zero nei limiti di una regione di stabilità predefinita. La posizione del punto di momento zero è influenzata dalla massa e dall’inerzia riferita del tronco del robot, poiché il suo movimento richiede generalmente coppie di caviglia grandi per mantenere una soddisfacente stabilità posturale dinamica.
Un approccio per risolvere questo problema consiste nell’utilizzare piccoli movimenti del tronco per stabilizzare la postura del robot. Tuttavia, sono in fase di sviluppo alcuni nuovi metodi di pianificazione per definire le traiettorie dei collegamenti delle gambe in modo tale che il busto del robot sia guidato in modo naturale al fine di ridurre la coppia della caviglia necessaria per compensare il suo movimento. Se la pianificazione della traiettoria per i leg link è ben riuscita, allora il punto di momento zero non si muoverà fuori dalla regione di stabilità predefinita e il movimento del robot diventerà più fluido, imitando una traiettoria naturale.
Calcolo ZMP
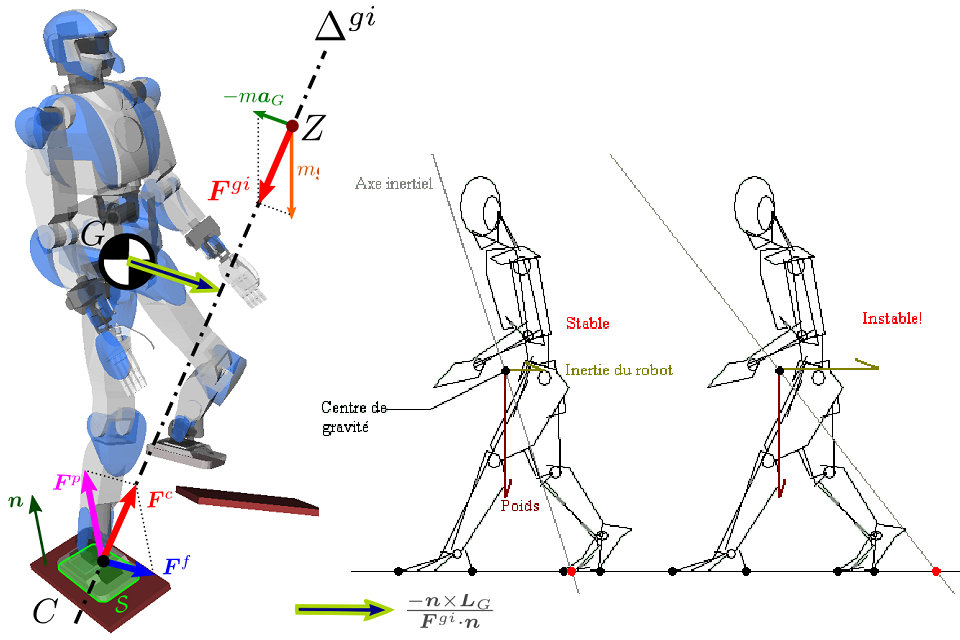
La forza risultante delle forze di inerzia e gravità che agiscono su un robot bipede è espressa dalla formula:

dove è la massa totale del robot, è l’accelerazione della gravità, è il centro di massa e è l’accelerazione del centro di massa.
 è la massa totale del robot,
è la massa totale del robot,  è l’accelerazione della gravità,
è l’accelerazione della gravità,  è il centro di massa e
è il centro di massa e  è l’accelerazione del centro di massa.
è l’accelerazione del centro di massa.Il momento in qualsiasi punto può essere definito come:
 può essere definito come:
può essere definito come:
dove è la velocità del momento angolare al centro della massa.
Le equazioni di Newton-Eulero del movimento globale del robot bipede possono essere scritte come:
 è la velocità del momento angolare al centro della massa.
è la velocità del momento angolare al centro della massa.

dove è il risultante delle forze di contatto in X e è il momento relativo alle forze di contatto su qualsiasi punto X.
Le equazioni di Newton-Euler possono essere riscritte come:
 è il risultante delle forze di contatto in X e
è il risultante delle forze di contatto in X e  è il momento relativo alle forze di contatto su qualsiasi punto X.
è il momento relativo alle forze di contatto su qualsiasi punto X.

quindi è più facile vedere che abbiamo:


Queste equazioni mostrano che il robot bipede è equilibrato dinamicamente se le forze di contatto e le forze di inerzia e gravità sono strettamente opposte.
Se un asse è definito, dove il momento è parallelo al vettore normale dalla superficie di ogni punto dell’asse, quindi lo Zero Moment Point (ZMP) appartiene necessariamente a questo asse, poiché è per definizione diretto lungo il vettore . Lo ZMP sarà quindi l’intersezione tra l’asse e la superficie del terreno tale che:
 è definito, dove il momento è parallelo al vettore normale
è definito, dove il momento è parallelo al vettore normale  dalla superficie di ogni punto dell’asse, quindi lo Zero Moment Point (ZMP) appartiene necessariamente a questo asse, poiché è per definizione diretto lungo il vettore
dalla superficie di ogni punto dell’asse, quindi lo Zero Moment Point (ZMP) appartiene necessariamente a questo asse, poiché è per definizione diretto lungo il vettore
con


dove rappresenta lo ZMP.
 rappresenta lo ZMP.
rappresenta lo ZMP.A causa dell’opposizione tra le forze di gravità e di inerzia e le forze di contatto menzionate in precedenza, il {\ displaystyle Z} punto (ZMP) può essere definito da:

dove è un punto sul piano di contatto, ad esempio la normale proiezione del centro di massa.
 è un punto sul piano di contatto, ad esempio la normale proiezione del centro di massa.
è un punto sul piano di contatto, ad esempio la normale proiezione del centro di massa.Storia del concetto
La nozione di ZMP è stata introdotta per la prima volta da Miomir Vukobratović al Terzo congresso dell’Unione per la meccanica teorica e applicata svoltosi a Mosca nel gennaio 1968. Il termine “punto di momento zero” è apparso nelle opere pubblicate. durante gli anni seguenti.
L’interesse per la ZMP decollò negli anni ’90, quando i roboticisti lo applicarono con successo per controllare le leggi per il bipedal walking. Il modello fondamentale che ha permesso questi sviluppi è quello del pendolo invertito: la parte superiore del corpo ha una massa maggiore delle gambe, camminare consiste in prima approssimazione al movimento di un pendolo invertito, vale a dire una massa collegata a una base mobile di una barra di massa zero (il modello “CART”). La massa in questione rappresenta il centro di gravità del robot, l’asta la sua gamba di supporto e il punto base mobile non è altro che ZMP. Questo modello è stato applicato con successo ai robot HRP-2 1 e HRP-4C.] Dove il centro di gravità rimane ad altezza costante.
Collegamento con il centro di pressione
Il centro di pressione è una caratteristica del punto dinamico di un contatto. A differenza dello ZMP, che è definito in base a tutte le accelerazioni del robot, il COP è una quantità locale definita dalle forze esercitate sulla superficie di un contatto. Tuttavia, quando c’è un solo contatto, o il robot sta camminando su un terreno orizzontale, il COP e lo ZMP coincidono.
La figura a destra rappresenta il centro di gravità , il centro di pressione del contatto piede-destra così come un ZMP . dots sono sempre allineati sull’asse inerziale .Quest’ultimo non passa necessariamente attraverso il centro di gravità, a meno che il robot non mantenga il suo momento angolare ( ), che è un’ipotesi di lavoro comune nella locomozione.


Caso speciale di terreno piano
Finché il contatto con la superficie non si rompe, il centro di pressione risiede necessariamente all’interno della superficie di contatto tra il robot e l’ambiente. Quando i due piedi del robot sono in contatto con la stessa superficie (il terreno), questa superficie di levitazione è lo scafo convesso di tutti i punti di appoggio, vale a dire l’insieme di punti situati “tra i due piedi”. Questa superficie consente di definire le pressioni e l’attrito, e quindi un centro di pressione associato (vedere Centro di pressione per ulteriori dettagli). COP e ZMP coincidenti, otteniamo il criterio:

Criterio di non inclinazione: durante il funzionamento senza inclinazione, lo ZMP si trova all’interno della superficie di sollevamento, definita come lo scafo convesso dei fulcri.
Questo criterio è più frequentemente utilizzato per la marcia di robot umanoidi su terreno pianeggiante.
applicazioni
Punto di momento zero è stato proposto come parametro che può essere utilizzato per valutare la stabilità contro il ribaltamento di robot come iRobot PackBot durante la navigazione di rampe e ostacoli.